This paper investigates the output-feedback stabilization for stochastic nonlinear systems with both Markovian switching and time-varying powers. Specifically, by developing a novel dynamic gain method and using the Itô formula of Markovian switching systems, a reduced-order observer with a dynamic gain and an output-feedback controller are designed. By using advanced stochastic analysis methods, we show that the closed-loop system has an almost surely unique solution and the states are regulated to the origin almost surely. A distinct feature of this paper is that even though there is no Markovian switching, our design is also new since it can deal with nonlinear growth rate, while the existing results can only deal with constant growth rate. Finally, the effectiveness of the design method is verified by a simulation example.
Citation: Jiabao Gu, Hui Wang, Wuquan Li. Output-Feedback stabilization for stochastic nonlinear systems with Markovian switching and time-varying powers[J]. Mathematical Biosciences and Engineering, 2022, 19(11): 11071-11085. doi: 10.3934/mbe.2022516
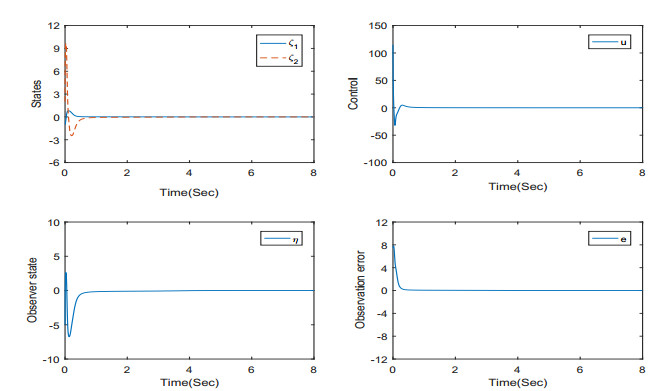
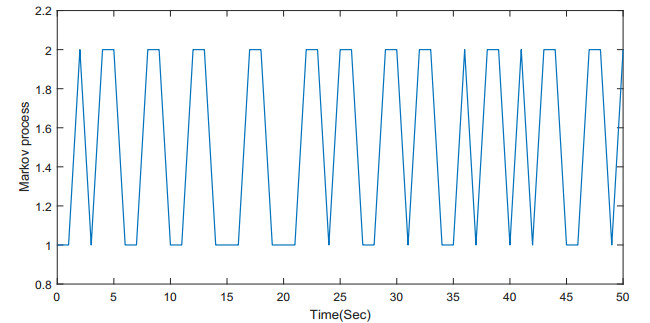
This paper investigates the output-feedback stabilization for stochastic nonlinear systems with both Markovian switching and time-varying powers. Specifically, by developing a novel dynamic gain method and using the Itô formula of Markovian switching systems, a reduced-order observer with a dynamic gain and an output-feedback controller are designed. By using advanced stochastic analysis methods, we show that the closed-loop system has an almost surely unique solution and the states are regulated to the origin almost surely. A distinct feature of this paper is that even though there is no Markovian switching, our design is also new since it can deal with nonlinear growth rate, while the existing results can only deal with constant growth rate. Finally, the effectiveness of the design method is verified by a simulation example.

| [1] | X. R. Mao, Stochastic Differential Equations and Applications, Horwood, 1997. |
| [2] | P. Protter, Stochastic Integration and Differential Equations, Springer, 2013. |
| [3] |
W. Q. Li, L. Liu, G. Feng, Cooperative control of multiple nonlinear benchmark systems perturbed by second-order moment processes, IEEE Trans. Cybern., 50 (2020), 902–910. https://doi.org/10.1109/TCYB.2018.2869385 doi: 10.1109/TCYB.2018.2869385

|
| [4] |
W. Q. Li, M. Krstic, Stochastic adaptive nonlinear control with filterless least-squares, IEEE Trans. Automat. Contr., 66 (2021), 3893–3905. https://doi.org/10.1109/TAC.2020.3027650 doi: 10.1109/TAC.2020.3027650
|
| [5] | R. H. Cui, X. J. Xie, Adaptive state-feedback stabilization of state-constrained stochastic high-order nonlinear systems, Sci. China Inf. Sci., 64 (2021), 200203. https://linkspringer.53yu.com/article/10.1007/s11432-021-3293-0 |
| [6] |
R. H. Cui, X. J. Xie, Finite-time stabilization of output-constrained stochastic high-order nonlinear systems with high-order and low-order nonlinearities, Automatica, 136 (2022), 110085. https://doi.org/10.1016/j.automatica.2021.110085 doi: 10.1016/j.automatica.2021.110085
|
| [7] | W. Q. Li, M. Krstic, Prescribed-time output-feedback control of stochastic nonlinear systems, IEEE Trans. Automat. Contr., scheduled in 68 (2023). https://doi.org/10.1109/TAC.2022.3151587 |
| [8] |
W. Q. Li, X. X. Yao, M. Krstic, Adaptive-gain observer-based stabilization of stochastic strict-feedback systems with sensor uncertainty, Automatica, 120 (2020), 109112. https://doi.org/10.1016/j.automatica.2020.109112 doi: 10.1016/j.automatica.2020.109112
|
| [9] |
W. Q. Li, L. Liu, G. Feng, Distributed output-feedback tracking of multiple nonlinear systems with unmeasurable states, IEEE Trans. Syst. Man Cybern., 51 (2021), 477–486. https://doi.org/10.1109/TSMC.2018.2875453 doi: 10.1109/TSMC.2018.2875453
|
| [10] |
Y. Ji, H. J. Chizeck, Controllability, stabilizability and continuous-time markovian jump linear quadratic control, IEEE Trans. Automat. Contr., 35 (1990), 777–788. https://doi.org/10.1109/9.57016 doi: 10.1109/9.57016
|
| [11] | X. R. Mao, C. G. Yuan, Stochastic Differential Equations with Markovian Switching, Horwood, Imperial college press, 2006. |
| [12] |
S. Li, W. H. Zhang, M. Gao, Some remarks on infinite horizon stochastic $H_2/H_\infty$ control with $(x, u, v)$-dependent noise and Markov jumps, J. Franklin Inst., 352 (2015), 3929–3946. https://doi.org/10.1016/j.jfranklin.2015.05.037 doi: 10.1016/j.jfranklin.2015.05.037
|
| [13] |
Z. J. Wu, J. Yang, P. Shi, Adaptive tracking for stochastic nonlinear systems with markovian switching, IEEE Trans. Automat. Contr., 55 (2010), 2135–2141. https://doi.org/10.1109/TAC.2010.2051090 doi: 10.1109/TAC.2010.2051090
|
| [14] |
W. Q. Li, Z. J. Wu, Output tracking of stochastic high-order nonlinear systems with Markovian switching, IEEE Trans. Automat. Contr., 58 (2013), 1585–1590. https://doi.org/10.1109/TAC.2012.2229814 doi: 10.1109/TAC.2012.2229814
|
| [15] |
J. Z. Liu, S. Yan, D. L. Zeng, Y. Hu, Y. Lv, A dynamic model used for controller design of a coal fired once-through boiler-turbine unit, Energy, 93 (2015), 2069–2078. https://doi.org/10.1016/j.energy.2015.10.077 doi: 10.1016/j.energy.2015.10.077
|
| [16] |
W. Q. Li, Y. Liu, X. X. Yao, State-feedback stabilization and inverse optimal control for stochastic high-order nonlinear systems with time-varying powers, Asian J. Control, 23 (2021), 739–750. https://doi.org/10.1002/asjc.2250 doi: 10.1002/asjc.2250
|
| [17] |
W. Q. Li, M. Krstic, Mean-nonovershooting control of stochastic nonlinear systems, IEEE Trans. Automat. Contr., 66 (2021), 5756–5771. https://doi.org/10.1109/TAC.2020.3042454 doi: 10.1109/TAC.2020.3042454
|
| [18] |
W. Q. Li, M. Krstic, Stochastic nonlinear prescribed-time stabilization and inverse optimality, IEEE Trans. Automat. Contr., 67 (2022), 1179–1193. https://doi.org/10.1109/TAC.2021.3061646 doi: 10.1109/TAC.2021.3061646
|
| [19] |
C. C. Chen, C. Qian, X. Lin, Y. W. Liang, Smooth output feedback stabilization for nonlinear systems with time-varying powers, Int. J. Robust Nonlin., 27 (2017), 5113–5128. https://doi.org/10.1016/j.ifacol.2016.10.287 doi: 10.1016/j.ifacol.2016.10.287
|
| [20] |
W. Lin, C. J. Qian, Adding one power integrator: a tool for global stabilization of high-order lower-triangular systems, Syst. Control. Lett., 39 (2000), 339–351. https://doi.org/10.1016/S0167-6911(99)00115-2 doi: 10.1016/S0167-6911(99)00115-2
|
| [21] |
J. Zhai, H. R. Karimi, Global output feedback control for a class of nonlinear systems with unknown homogenous growth condition, Int. J. Robust Nonlin., 29 (2019), 2082–2095. https://doi.org/10.1002/rnc.4475 doi: 10.1002/rnc.4475
|
| [22] |
C. J. Qian, W. Lin, Smooth output feedback stabilization of planar systems without controlable/ observable linearization, IEEE Trans. Automat. Contr., 47 (2002), 2068–2073. https://doi.org/10.1109/TAC.2002.805690 doi: 10.1109/TAC.2002.805690
|
| [23] |
Z. J. Wu, X. J. Xie, P. Shi, Y. Q. Xia, Backstepping controller design for a class of stochastic nonlinear systems with Markovian switching, Automatica, 45 (2009), 997–1004. https://doi.org/10.1016/j.automatica.2008.12.002 doi: 10.1016/j.automatica.2008.12.002
|
| [24] |
C. G. Yuan, X. R. Mao, Robust stability and controllability of stochastic differential delay equations with Markovian switching, Automatica, 40 (2004), 343–354. https://doi.org/10.1016/j.automatica.2003.10.012 doi: 10.1016/j.automatica.2003.10.012
|
| [25] |
X. D. Li, D. W. Ho, J. D. Cao, Finite-time stability and settling-time estimation of nonlinear impulsive systems, Automatica, 99 (2019), 361–368. https://doi.org/10.1016/j.automatica.2018.10.024 doi: 10.1016/j.automatica.2018.10.024
|
| [26] |
X. D. Li, S. J. Song, J. H. Wu, Exponential stability of nonlinear systems with delayed impulses and applications, IEEE Trans. Automat. Contr., 64 (2019), 4024–4034. https://doi.org/10.1109/TAC.2019.2905271 doi: 10.1109/TAC.2019.2905271
|
| [27] |
X. D. Li, D. X. Peng, J. D. Cao, Lyapunov stability for impulsive systems via event-triggered impulsive control, IEEE Trans. Automat. Contr., 65 (2020), 4908–4913. https://doi.org/10.1109/TAC.2020.2964558 doi: 10.1109/TAC.2020.2964558
|
Figures(2)

Jiabao Gu, Hui Wang, Wuquan Li. Output-Feedback stabilization for stochastic nonlinear systems with Markovian switching and time-varying powers[J]. Mathematical Biosciences and Engineering, 2022, 19(11): 11071-11085. doi: 10.3934/mbe.2022516







 DownLoad:
DownLoad: