In this first part of a series of 3 papers, we set up a framework to study the existence of uniformly bounded extension and trace operators for $ W^{1, p} $-functions on randomly perforated domains, where the geometry is assumed to be stationary ergodic. We drop the classical assumption of minimally smoothness and study stationary geometries which have no global John regularity. For such geometries, uniform extension operators can be defined only from $ W^{1, p} $ to $ W^{1, r} $ with the strict inequality $ r < p $. In particular, we estimate the $ L^{r} $-norm of the extended gradient in terms of the $ L^{p} $-norm of the original gradient. Similar relations hold for the symmetric gradients (for $ {\mathbb{R}^{d}} $-valued functions) and for traces on the boundary. As a byproduct we obtain some Poincaré and Korn inequalities of the same spirit.
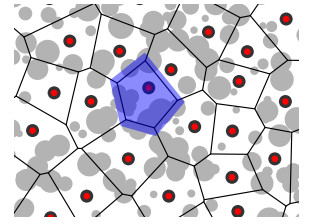
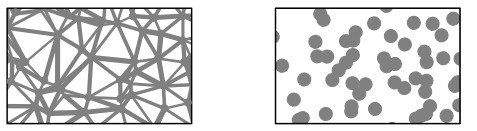
Such extension and trace operators are important for compactness in stochastic homogenization. In contrast to former approaches and results, we use very weak assumptions: local $ (\delta, M) $-regularity to quantify statistically the local Lipschitz regularity and isotropic cone mixing to quantify the density of the geometry and the mesoscopic properties. These two properties are sufficient to reduce the problem of extension operators to the connectivity of the geometry. In contrast to former approaches we do not require a minimal distance between the inclusions and we allow for globally unbounded Lipschitz constants and percolating holes. We will illustrate our method by applying it to the Boolean model based on a Poisson point process and to a Delaunay pipe process, for which we can explicitly estimate the connectivity terms.
Citation: Martin Heida. Stochastic homogenization on perforated domains Ⅰ – Extension Operators[J]. Networks and Heterogeneous Media, 2023, 18(4): 1820-1897. doi: 10.3934/nhm.2023079
In this first part of a series of 3 papers, we set up a framework to study the existence of uniformly bounded extension and trace operators for $ W^{1, p} $-functions on randomly perforated domains, where the geometry is assumed to be stationary ergodic. We drop the classical assumption of minimally smoothness and study stationary geometries which have no global John regularity. For such geometries, uniform extension operators can be defined only from $ W^{1, p} $ to $ W^{1, r} $ with the strict inequality $ r < p $. In particular, we estimate the $ L^{r} $-norm of the extended gradient in terms of the $ L^{p} $-norm of the original gradient. Similar relations hold for the symmetric gradients (for $ {\mathbb{R}^{d}} $-valued functions) and for traces on the boundary. As a byproduct we obtain some Poincaré and Korn inequalities of the same spirit.
Such extension and trace operators are important for compactness in stochastic homogenization. In contrast to former approaches and results, we use very weak assumptions: local $ (\delta, M) $-regularity to quantify statistically the local Lipschitz regularity and isotropic cone mixing to quantify the density of the geometry and the mesoscopic properties. These two properties are sufficient to reduce the problem of extension operators to the connectivity of the geometry. In contrast to former approaches we do not require a minimal distance between the inclusions and we allow for globally unbounded Lipschitz constants and percolating holes. We will illustrate our method by applying it to the Boolean model based on a Poisson point process and to a Delaunay pipe process, for which we can explicitly estimate the connectivity terms.

| [1] | R. A Adams, J. J. F Fournier, Sobolev Spaces, Netherlands: Elsevier, 2003. |
| [2] | S. K. Berberian, Measure and Integration, New York: Chelsea Pub, 1970. |
| [3] |
D. Cioranescu, J. S. J. Paulin, Homogenization in open sets with holes, J Math Anal Appl, 71 (1979), 590–607. https://doi.org/10.1016/0022-247X(79)90211-7 doi: 10.1016/0022-247X(79)90211-7

|
| [4] | D. J. Daley, D. Vere-Jones, An Introduction to the Theory of Point Processes, New York: Springer-Verlag, 1988. |
| [5] | Ricardo G Durán and Maria Amelia Muschietti. The Korn inequality for Jones domains. Electron. J. Differ. Equ., 2004 (2004), 1–10. Available from: http://ejde.math.txstate.edu |
| [6] | L. C. Evans, Partial Differential Equations, Providence: American Mathematical Society, 2010. |
| [7] |
M. Gahn, M. Neuss-Radu, P. Knabner, Homogenization of reaction–diffusion processes in a two-component porous medium with nonlinear flux conditions at the interface, SIAM Journal on Applied Mathematics, 76 (2016), 1819–1843. https://doi.org/10.1137/15M1018484 doi: 10.1137/15M1018484
|
| [8] | A. Giunti, Derivation of Darcy's law in randomly punctured domains, arXiv: 2101.01046, [preprint], (2021) [cited 2023 November 20]. Available from: https://doi.org/10.48550/arXiv.2101.01046 |
| [9] |
N. Guillen, I. Kim, Quasistatic droplets in randomly perforated domains, Arch Ration Mech Anal, 215 (2015), 211–281. https://doi.org/10.1007/s00205-014-0777-2 doi: 10.1007/s00205-014-0777-2
|
| [10] |
M. Heida, An extension of the stochastic two-scale convergence method and application, Asymptot. Anal., 72 (2011), 1–30. https://doi.org/10.3233/ASY-2010-1022 doi: 10.3233/ASY-2010-1022
|
| [11] | M. Höpker, Extension Operators for Sobolev Spaces on Periodic Domains, Their Applications, and Homogenization of a Phase Field Model for Phase Transitions in Porous Media, (German), Doctoral Thesis of University Bremen, Bremen, 2016. |
| [12] |
M. Höpker, M. Böhm, A note on the existence of extension operators for Sobolev spaces on periodic domains, Comptes Rendus Math., 352 (2014), 807–810. https://doi.org/10.1016/j.crma.2014.09.002 doi: 10.1016/j.crma.2014.09.002
|
| [13] | P. W Jones, Quasiconformal mappings and extendability of functions in Sobolev spaces, Acta Math., 147 (1981), 71–88. |
| [14] | J. L. Kelley, General Topology, New York: Van Nostrand, 1955. |
| [15] |
S. M. Kozlov, Averaging of random operators, Matematicheskii Sbornik, 151 (1979), 188–202. https://doi.org/10.1070/SM1980v037n02ABEH001948 doi: 10.1070/SM1980v037n02ABEH001948
|
| [16] | U. Krengel, A. Brunel, Ergodic theorems, Berlin: Walter de Gruyter, 1985. |
| [17] |
P. Marcellini, C. Sbordone, Homogenization of non-uniformly elliptic operators, Appl Anal, 8 (1978), 101–113. https://doi.org/10.1080/00036817808839219 doi: 10.1080/00036817808839219
|
| [18] | G. Matheron, Random sets and integral geometry, New York: Wiley, 1975. |
| [19] |
J. Mecke, Stationäre zufällige Maße auf lokalkompakten abelschen Gruppen, Probab Theory Relat Fields, 9 (1967), 36–58. https://doi.org/10.1007/BF00535466 doi: 10.1007/BF00535466
|
| [20] | J. A. Nitsche, On Korn's second inequality, RAIRO. Analyse numérique, 15 (1981), 237–248. |
| [21] | O. A. Oleïnik, A. S Shamaev, G. A Yosifian, Mathematical problems in elasticity and homogenization, Netherlands: Elsevier Science, 2009. |
| [22] | G. C. Papanicolaou, S. R. S. Varadhan, Boundary value problems with rapidly oscillating random coefficients, Colloq. Math. Soc. János Bolyai, 27 (1979), 835–873. |
| [23] | G Papanicolau, A Bensoussan, J. L Lions, Asymptotic analysis for periodic structures, Netherlands: Elsevier, 1978. |
| [24] |
A. Piatnitski, M. Ptashnyk, Homogenization of biomechanical models of plant tissues with randomly distributed cells, Nonlinearity, 33 (2020), 5510. https://doi.org/10.1088/1361-6544/ab95ab doi: 10.1088/1361-6544/ab95ab
|
| [25] | B. Schweizer, Partielle Differentialgleichungen: Eine Anwendungsorientierte Einfuhrung, Berlin: Springer, 2013. |
| [26] | Elias M Stein, Singular integrals and differentiability properties of functions (PMS-30), Princeton NJ: Princeton University Press, 2016. |
| [27] | A. A. Tempel'man, Ergodic theorems for general dynamical systems. Trudy Moskovskogo Matematicheskogo Obshchestva, 26 (1972), 95–132. |
| [28] |
G. Xia, The stretch factor of the delaunay triangulation is less than 1.998, SIAM J Sci Comput, 42 (2013), 1620–1659. https://doi.org/10.1137/110832458 doi: 10.1137/110832458
|
| [29] |
C. L. Yao, G. Chen, T. D. Guo, Large deviations for the graph distance in supercritical continuum percolation, J Appl Prob, 48 (2011), 154–172. https://doi.org/10.1239/jap/1300198142 doi: 10.1239/jap/1300198142
|
| [30] | G. Yosifian, Homogenization of some contact problems for the system of elasticity in perforated domains, Rendiconti del Seminario Matematico della Università di Padova, 105 (2001), 37–64. |
| [31] |
G. A Yosifian, Some unilateral boundary-value problems for elastic bodies with rugged boundaries, J. Math. Sci., 108 (2002), 574–607. https://doi.org/10.1023/A:1013162423511 doi: 10.1023/A:1013162423511
|
| [32] |
M. Zaehle, Random processes of hausdorff rectifiable closed sets, Math. Nachr., 108 (1982), 49–72. https://doi.org/10.1002/mana.19821080105 doi: 10.1002/mana.19821080105
|
Figures(7)
Martin Heida. Stochastic homogenization on perforated domains Ⅰ – Extension Operators[J]. Networks and Heterogeneous Media, 2023, 18(4): 1820-1897. doi: 10.3934/nhm.2023079







 DownLoad:
DownLoad: