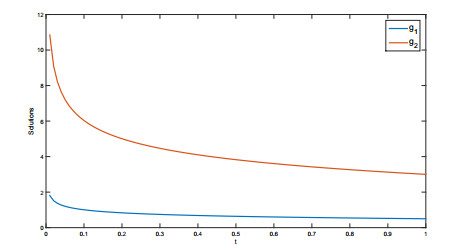
Our objective in this study is to investigate the behavior of a nonlinear terminal fractional system under $ w $-Hilfer fractional derivative in different weighted Banach spaces. We examine the system's dynamics and understand the effects of different weighted Banach spaces on the properties of solutions, including existence, uniqueness, stability, and symmetry. We derive the equivalent integral equations and employ the Schauder and Banach fixed point theorems. Additionally, we discuss three symmetric cases of the system to show how the choice of the weighted function $ w(\iota) $ impacts the solutions and their symmetry properties. We study the stability of the solutions in the Ulam sense to assess the robustness and reliability of these solutions under various conditions. Finally, to understand the system's behavior, we present an illustrative example with graphs of the symmetric cases.
Citation: K. A. Aldwoah, Mohammed A. Almalahi, Kamal Shah, Muath Awadalla, Ria H. Egami, Kinda Abuasbeh. Symmetry analysis for nonlinear fractional terminal system under $ w $-Hilfer fractional derivative in different weighted Banach spaces[J]. AIMS Mathematics, 2024, 9(5): 11762-11788. doi: 10.3934/math.2024576
Our objective in this study is to investigate the behavior of a nonlinear terminal fractional system under $ w $-Hilfer fractional derivative in different weighted Banach spaces. We examine the system's dynamics and understand the effects of different weighted Banach spaces on the properties of solutions, including existence, uniqueness, stability, and symmetry. We derive the equivalent integral equations and employ the Schauder and Banach fixed point theorems. Additionally, we discuss three symmetric cases of the system to show how the choice of the weighted function $ w(\iota) $ impacts the solutions and their symmetry properties. We study the stability of the solutions in the Ulam sense to assess the robustness and reliability of these solutions under various conditions. Finally, to understand the system's behavior, we present an illustrative example with graphs of the symmetric cases.

| [1] |
M. S. Abdo, K. Shah, S. K. Panchal, H. A. Wahash, Existence and Ulam stability results of a coupled system for terminal value problems involving $\psi $-Hilfer fractional operator, Adv. Differ. Equ., 2020 (2020), 316. https://doi.org/10.1186/s13662-020-02775-x doi: 10.1186/s13662-020-02775-x

|
| [2] |
H. Ahmad, M. N. Khan, I. Ahmad, M. Omri, M. F. Alotaibi, A meshless method for numerical solutions of linear and nonlinear time-fractional Black-Scholes models, AIMS Mathematics, 8 (2023), 19677–19698. https://doi.org/10.3934/math.20231003 doi: 10.3934/math.20231003
|
| [3] |
A. Aldhafeeri, M. A. Nuwairan, Bifurcation of some novel wave solutions for modified nonlinear Schr odinger equation with time M-fractional derivative, Mathematics, 11 (2023), 1219. https://doi.org/10.3390/math11051219 doi: 10.3390/math11051219
|
| [4] |
K. A. Aldwoah, M. A. Almalahi, M. A. Abdulwasaa, K. Shah, S. V. Kawale, M. Awadalla, et al., Mathematical analysis and numerical simulations of the piecewise dynamics model of Malaria transmission: A case study in Yemen, AIMS Mathematics, 9 (2024), 4376–4408. https://doi.org/10.3934/math.2024216 doi: 10.3934/math.2024216
|
| [5] | T. A. Aljaaidi, D. B. Pachpatte, M. S. Abdo, T. Botmart, H. Ahmad, M. A. Almalahi, et al., $\left(k, \psi \right) $-proportional fractional integral Pólya-Szegö- and Grüss-type inequalities, Fractal Fract., 5 (2021), 172. https://doi.org/10.3390/fractalfract5040172 |
| [6] |
M. A. Almalahi, M. S. Abdo, S. K. Panchal, On the theory of fractional terminal value problem with $w$-Hilfer fractional derivative, AIMS Mathematics, 5 (2020), 4889–4908. https://doi.org/10.3934/math.2020312 doi: 10.3934/math.2020312
|
| [7] |
M. A. Almalahi, S. K. Panchal, Some properties of implicit impulsive coupled system via $\varphi $-Hilfer fractional operator, Bound. Value Probl., 2021 (2021), 61. https://doi.org/10.1186/s13661-021-01543-4 doi: 10.1186/s13661-021-01543-4
|
| [8] | R. Almeida, A Caputo fractional derivative of a function with respect to another function, Commun. Nonlinear Sci. Numer. Simul., 44 (2017), 460–481. https://doi.org/10.1016/j.cnsns.2016.09.006 |
| [9] |
R. Almeida, A. B. Malinowska, M. T. Monteiro, Fractional differential equations with a Caputo derivative with respect to a kernel function and their applications, Math. Meth. Appl. Sci., 41 (2018), 336–352. https://doi.org/10.1002/mma.4617 doi: 10.1002/mma.4617
|
| [10] |
R. Almeida, A. B. Malinowska, T. Odzijewicz, Fractional differential equations with dependence on the Caputo-Katugampola derivative, J. Comput. Nonlinear Dynam., 11 (2016), 061017. https://doi.org/10.1115/1.4034432 doi: 10.1115/1.4034432
|
| [11] | R. Almeida, D. F. M. Torres, Calculus of variations with fractional derivatives and fractional integrals, Appl. Math. Lett., 22 (2009), 1816–1820. https://doi.org/10.1016/j.aml.2009.07.002 |
| [12] |
M. A. Nuwairan, Bifurcation and analytical solutions of the space-fractional stochastic Schr odinger equation with white noise, Fractal Fract., 7 (2023), 157. https://doi.org/10.3390/fractalfract7020157 doi: 10.3390/fractalfract7020157
|
| [13] |
M. A. Nuwairan, A. G. Ibrahim, Nonlocal impulsive differential equations and inclusions involving Atangana-Baleanu fractional derivative in infinite dimensional spaces, AIMS Mathematics, 8 (2023), 11752–11780. https://doi.org/10.3934/math.2023595 doi: 10.3934/math.2023595
|
| [14] |
A. Alsaedi, M. Alghanmi, B. Ahmad, B. Alharbi, Uniqueness of solutions for a $\psi $-Hilfer fractional integral boundary value problem with the p-Laplacian operator, Demonstr. Math., 56 (2023), 20220195. https://doi.org/10.1515/dema-2022-0195 doi: 10.1515/dema-2022-0195
|
| [15] | G. E. Andrews, R. Askey, R. Roy, Special functions, Cambridge: Cambridge University Press, 1999. https://doi.org/10.1017/CBO9781107325937 |
| [16] |
M. Benchohra, S. Bouriah, J. J. Nieto, Terminal value problem for differential equations with Hilfer-Katugampola fractional derivative, Symmetry, 11 (2019), 672. https://doi.org/10.3390/sym11050672 doi: 10.3390/sym11050672
|
| [17] |
A. Bonfanti, J. L. Kaplan, G. Charras, A. Kabla, Fractional viscoelastic models for power-law materials, Soft Matter, 16 (2020), 6002–6020. https://doi.org/10.1039/D0SM00354A doi: 10.1039/D0SM00354A
|
| [18] | S. Das, Functional fractional calculus, Berlin, Heidelberg: Springer, 2011. https://doi.org/10.1007/978-3-642-20545-3 |
| [19] |
E. C. de Oliveira, J. V. D. C. Sousa, Ulam-Hyers-Rassias stability for a class of fractional integro-differential equations, Results Math., 73 (2018), 111. https://doi.org/10.1007/s00025-018-0872-z doi: 10.1007/s00025-018-0872-z
|
| [20] |
L. Feng, I. Turner, P. Perré, K. Burrage, An investigation of nonlinear time-fractional anomalous diffusion models for simulating transport processes in heterogeneous binary media, Commun. Nonlinear Sci. Numer. Simul., 92 (2021), 105454. https://doi.org/10.1016/j.cnsns.2020.105454 doi: 10.1016/j.cnsns.2020.105454
|
| [21] | A. Granas, J. Dugundji, Fixed point theory, New York: Springer, 2003. https://doi.org/10.1007/978-0-387-21593-8 |
| [22] | J. Hadamard, Essai sur létude des fonctions donnees par leur developpment de Taylor, J. Math. Pures Appl., 8 (1892), 101–186. |
| [23] | R. Hilfer, Applications of fractional calculus in physics, Singapore: World Scientific, 2000. https://doi.org/10.1142/3779 |
| [24] |
F. Jarad, T. Abdeljawad, Generalized fractional derivatives and Laplace transform, Discrete Contin. Dyn. Syst. S, 13 (2020), 709–722. https://doi.org/10.3934/dcdss.2020039 doi: 10.3934/dcdss.2020039
|
| [25] |
F. Jarad, T. Abdeljawad, D. Baleanu, Caputo-type modification of the Hadamard fractional derivatives, Adv. Differ. Equ., 2012 (2012), 142. https://doi.org/10.1186/1687-1847-2012-142 doi: 10.1186/1687-1847-2012-142
|
| [26] | U. N. Katugampola, A new approach to generalized fractional derivatives, Bull. Math. Anal. Appl., 6 (2014), 1–15. |
| [27] | A. A. Kilbas, H. M. Srivastava, J. J. Trujillo, Theory and applications of the fractional differential equations, Amsterdam: Elsevier, 2006. |
| [28] | V. Lakshmikantham, J. V. Devi, Theory of fractional differential equations in a Banach space, Eur. J. Pure Appl. Math., 1 (2007), 38–45. |
| [29] | K. S. Miller, B. Ross, An introduction to fractional calculus and fractional differential equations, New York: Wiley, 1993. |
| [30] |
D. S. Oliveira, E. C. de Oliveira, Hilfer-Katugampola fractional derivatives, Comp. Appl. Math., 37 (2018), 3672–3690. https://doi.org/10.1007/s40314-017-0536-8 doi: 10.1007/s40314-017-0536-8
|
| [31] | I. Podlubny, Fractional differential equations, San Diego: Academic Press, 1999. |
| [32] |
M. D. Qassim, K. M. Furati, N. E. Tatar, On a differential equation involving Hilfer-Hadamard fractional derivative, Abstr. Appl. Anal., 2012 (2012), 391062. https://doi.org/10.1155/2012/391062 doi: 10.1155/2012/391062
|
| [33] | I. A. Rus, Ulam stabilities of ordinary differential equations in a Banach space, Carpathian J. Math., 26 (2010), 103–107. |
| [34] |
A. Samadi, S. K. Ntouyas, B. Ahmad, J. Tariboon, On a coupled differential system involving $\left(k, w\right) $-Hilfer derivative and $\left(k, w\right) $-Riemann-Liouville integral operators, Axioms, 12 (2023), 229. https://doi.org/10.3390/axioms12030229 doi: 10.3390/axioms12030229
|
| [35] |
S. A. H. Shah, M. U. Rehman, A note on terminal value problems for fractional differential equations on infinite interval, Appl. Math. Lett., 52 (2016), 118–125. https://doi.org/10.1016/j.aml.2015.08.008 doi: 10.1016/j.aml.2015.08.008
|
| [36] | D. R. Smart, Fixed point theorems, Cambridge: Cambridge University Press, 1980. |
| [37] |
J. V. D. C. Sousa, E. C. de Oliveira, On the $\psi $-Hilfer fractional derivative, Commun. Nonlinear Sci. Numer. Simul., 60 (2018), 72–91. https://doi.org/10.1016/j.cnsns.2018.01.005 doi: 10.1016/j.cnsns.2018.01.005
|
| [38] |
J. V. D. C. Sousa, E. C. de Oliveira, Ulam-Hyers stability of a nonlinear fractional Volterra integro-differential equation, Appl. Math. Lett., 81 (2018), 50–56. https://doi.org/10.1016/j.aml.2018.01.016 doi: 10.1016/j.aml.2018.01.016
|
| [39] |
J. V. D. C. Sousa, E. C. de Oliveira, On the Ulam-Hyers-Rassias stability for nonlinear fractional differential equations using the $w$ -Hilfer operator, J. Fixed Point Theory Appl., 20 (2018), 96. https://doi.org/10.1007/s11784-018-0587-5 doi: 10.1007/s11784-018-0587-5
|
| [40] |
J. V. D. C. Sousa, K. D. Kucche, E. C. de Oliveira, Stability of $\psi $-Hilfer impulsive fractional differential equations, Appl. Math. Lett., 88 (2019), 73–80. https://doi.org/10.1016/j.aml.2018.08.013 doi: 10.1016/j.aml.2018.08.013
|
| [41] |
S. Wei, W. Chen, Y. C. Hon, Characterizing time dependent anomalous diffusion process: A survey on fractional derivative and nonlinear models, Physica A, 462 (2016), 1244–1251. https://doi.org/10.1016/j.physa.2016.06.145 doi: 10.1016/j.physa.2016.06.145
|
| [42] |
H. Xu, B. Ahmad, G. Wang, L. Zhang, Radially symmetric solution for fractional Laplacian systems with different negative powers, Fractal Fract., 6 (2022), 352. https://doi.org/10.3390/fractalfract6070352 doi: 10.3390/fractalfract6070352
|
| [43] | R. Xu, P. Liu, L. Wang, C. Chen, J. Wang, Reliable weighted optimal transport for unsupervised domain adaptation, In: 2020 IEEE/CVF conference on computer vision and pattern recognition, 2020. https://doi.org/10.1109/CVPR42600.2020.00445 |
| [44] |
L. Zhang, W. Hou, B. Ahmad, G. Wang, Radial symmetry for logarithmic Choquard equation involving a generalized tempered fractional p-Laplacian, Discrete Contin. Dyn. Syst. S, 14 (2021), 3851–3863. https://doi.org/10.3934/dcdss.2020445 doi: 10.3934/dcdss.2020445
|



Figures(4)

K. A. Aldwoah, Mohammed A. Almalahi, Kamal Shah, Muath Awadalla, Ria H. Egami, Kinda Abuasbeh. Symmetry analysis for nonlinear fractional terminal system under $ w $-Hilfer fractional derivative in different weighted Banach spaces[J]. AIMS Mathematics, 2024, 9(5): 11762-11788. doi: 10.3934/math.2024576







 DownLoad:
DownLoad: