Citation: Ahsan Javed, Awais Ahmad, Ali Tahir, Umair Shabbir, Muhammad Nouman, Adeela Hameed. Potato peel waste-its nutraceutical, industrial and biotechnological applacations[J]. AIMS Agriculture and Food, 2019, 4(3): 807-823. doi: 10.3934/agrfood.2019.3.807

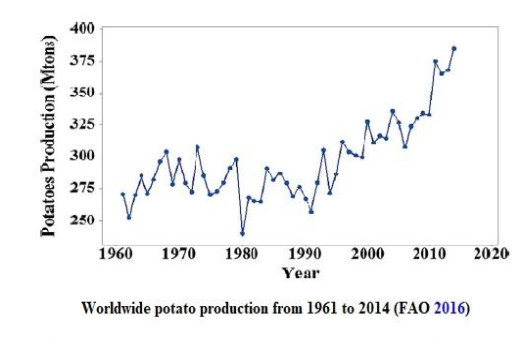
| [1] | FAO (2013, 2016) Food Agriculture Organization of the United Nations Statistics Division. |
| [2] |
Paleologou I, Vasiliou A, Grigorakis S, et al. (2016) Optimisation of a green ultrasound-assisted extraction process for potato peel (Solanum tuberosum) polyphenols using bio-solvents and response surface methodology. Biomass Convers Bior 6: 289-299. doi: 10.1007/s13399-015-0181-7

|
| [3] |
Chiellini E, Cinelli P, Chiellini F, et al. (2004) Environmentally degradable bio‐based polymeric blends and composites. Macromol Biosci 4: 218-231. doi: 10.1002/mabi.200300126
|
| [4] | Chang K (2019) Polyphenol antioxidants from potato peels: Extraction optimization and application to stabilizing lipid oxidation in foods. In: Proceedings of Proceedings of the National Conference on Undergraduate Research (NCUR), New York, NY, USA. |
| [5] |
Nelson M (2010) Utilization and application of wet potato processing coproducts for finishing cattle. J Anim Sci 88: E133-E142. doi: 10.2527/jas.2009-2502
|
| [6] |
Liang S, McDonald AG, Coats ER, et al. (2014) Lactic acid production with undefined mixed culture fermentation of potato peel waste. Waste Manag 34: 2022-2027. doi: 10.1016/j.wasman.2014.07.009
|
| [7] |
Bhushan S, Kalia K, Sharma M, et al. (2008) Processing of apple pomace for bioactive molecules. Crit Rev Biotechnol 28: 285-296. doi: 10.1080/07388550802368895
|
| [8] |
Arapoglou D, Varzakas T, Vlyssides A, et al. (2010) Ethanol production from potato peel waste (PPW). Waste Manag 30: 1898-1902. doi: 10.1016/j.wasman.2010.04.017
|
| [9] |
Mohdaly AAA, Hassanien MFR, Mahmoud A, et al. (2013) Phenolics extracted from potato, sugar beet, and sesame processing by-products. INT J Food Prop 16: 1148-1168. doi: 10.1080/10942912.2011.578318
|
| [10] | Sepelev I, Galoburda R (2015) Industrial potato peel waste application in food production: A review. Res Rural Dev 1: 130-136. |
| [11] | Pathak PD, Mandavgane SA, Kulkarni BD, et al. (2015) Fruit peel waste as a novel low-cost bio adsorbent. Rev Chem Eng 31: 361-381. |
| [12] |
Maldonado AFS, Mudge E, Gänzle MG, et al. (2014) Extraction and fractionation of phenolic acids and glycoalkaloids from potato peels using acidified water/ethanol-based solvents. Food Res Int 65: 27-34. doi: 10.1016/j.foodres.2014.06.018
|
| [13] | Jeddou KB, Chaari F, Maktouf S, et al. (2016) Structural, functional, and antioxidant properties of water-soluble polysaccharides from potatoes peels. Food Chem205: 97-105. |
| [14] |
Liang S, McDonald AG (2014) Chemical and thermal characterization of potato peel waste and its fermentation residue as potential resources for biofuel and bioproducts production. J Agric Food Chem 62: 8421-8429. doi: 10.1021/jf5019406
|
| [15] |
Liang S, Han Y, Wei L, et al. (2015) Production and characterization of bio-oil and bio-char from pyrolysis of potato peel wastes. Biomass Convers Bior 5: 237-246. doi: 10.1007/s13399-014-0130-x
|
| [16] | Onyeneho SN, Hettiarachchy NS (1993) Antioxidant activity, fatty acids and phenolic acids compositions of potato peels. J Sci Food Agric62: 345-350. |
| [17] | Camire ME, Violette D, Dougherty MP, et al. (1997) Potato peel dietary fiber composition: Effects of peeling and extrusion cooking processes. J Agric Food Chem45: 1404-1408. |
| [18] |
Camire ME, Zhao J, Violette DA, et al. (1993) In vitro binding of bile acids by extruded potato peels. J Agric Food Chem 41: 2391-2394. doi: 10.1021/jf00036a033
|
| [19] | Mahmood A, Greenman J, Scragg A, et al. (1998) Orange and potato peel extracts: Analysis and use as Bacillus substrates for the production of extracellular enzymes in continuous culture. Enzyme Microb Technol22: 130-137. |
| [20] |
Ballesteros MN, Cabrera RM, Saucedo MS, et al. (2001) Dietary fiber and lifestyle influence serum lipids in free living adult men. J Am Coll Nutr 20: 649-655. doi: 10.1080/07315724.2001.10719163
|
| [21] | Lazarov K, Werman MJ (1996) Hypocholesterolaemic effect of potato peels as a dietary fibre source. Med Sci Res 24: 581-582. |
| [22] |
Alonso A, Beunza JJ, Bes-Rastrollo M, et al. (2006) Vegetable protein and fiber from cereal are inversely associated with the risk of hypertension in a Spanish cohort. Arch Med Res 37: 778-786. doi: 10.1016/j.arcmed.2006.01.007
|
| [23] |
Erkkilä AT, Lichtenstein AH (2006) Fiber and cardiovascular disease risk: How strong is the evidence. J Cardiovasc Nurs 21: 3-8. doi: 10.1097/00005082-200601000-00003
|
| [24] |
Camire ME, Zhao J, Dougherty MP, et al. (1995) In Vitro binding of benzo [a] pyrene by extruded potato peels. J Agric Food Chem 43: 970-973. doi: 10.1021/jf00052a024
|
| [25] | Kyzas GZ, Deliyanni EA (2015) Modified activated carbons from potato peels as green environmental-friendly adsorbents for the treatment of pharmaceutical effluents. Chem Eng Res Des97: 135-144. |
| [26] | Abd-El-Magied MM (1991) Effect of dietary fibre of potato peel on the rheological and organoleptic characteristics of biscuits. Egypt J Food Sci 19: 293-300. |
| [27] | Al-Weshahy A, Rao V (2012) Potato peel as a source of important phytochemical antioxidant nutraceuticals and their role in human health-A review. In: Phytochemicals as Nutraceuticals-Global Approaches to Their Role in Nutrition and Health, InTech. |
| [28] |
Panda SK, Mishra SS, Kayitesi E, et al. (2016) Microbial-processing of fruit and vegetable wastes for production of vital enzymes and organic acids: Biotechnology and scopes. Environ Res 146: 161-172. doi: 10.1016/j.envres.2015.12.035
|
| [29] |
Saldaña, MD, Valdivieso-Ramirez CS (2015) Pressurized fluid systems: Phytochemical production from biomass. J Supercrit Fluid 96: 228-244. doi: 10.1016/j.supflu.2014.09.037
|
| [30] | Fadel M (1999) Utilization of potato chips industry by products for the production of thermostable bacterial alpha amylase using solid state fermentation system. 1.-effect of incubation period, temperature, moisture level and inoculum size. Egypt J Microbiol. |
| [31] |
Mukherjee AK, Adhikari H, Rai SK, et al. (2008) Production of alkaline protease by a thermophilic Bacillus subtilis under solid-state fermentation (SSF) condition using imperata cylindrica grass and potato peel as low-cost medium: characterization and application of enzyme in detergent formulation. Biochem Eng J 39: 353-361. doi: 10.1016/j.bej.2007.09.017
|
| [32] | Sharma N, Tiwari DP, Singh SK, et al. (2014) The efficiency appraisal for removal of malachite green by potato peel and neem bark: isotherm and kinetic studies. Int J Chem Environ Eng 5: 83-88. |
| [33] | Prasad AGD, Pushpa HN (2007) Antimicrobial activity of potato peel waste. Asian J Microbiol Biotechnol Environ Sci 9: 559-561. |
| [34] | Sharma D, Ansari MJ, Gupta S, et al. (2015) Structural characterization and antimicrobial activity of a biosurfactant obtained from Bacillus pumilus DSVP18 grown on potato peels. Jundishapur J Microbiol 8: e21257. |
| [35] | Arapoglou D, Vlyssides A, Varzakas T, et al. (2009) Alternative ways for potato industries waste utilisation. In: Proceedings of Proceedings of the 11th International Conference on Environmental Science and Technolo gy, Chaina, Crete, Greece, 3-5. |
| [36] | Fu BR, Sun Y, WANG YX, et al. (2013) Construction of biogas fermentation system based on feedstock of potato residue.J Northeast Agric Univ 44: 102-106. |
| [37] |
Sanaei-Moghadam A, Abbaspour-Fard MH, Aghel H, et al. (2014) Enhancement of biogas production by co-digestion of potato pulp with cow manure in a CSTR system. Appl Biochem Biotechnol 173: 1858-1869. doi: 10.1007/s12010-014-0972-5
|
| [38] |
Liang S, McDonald AG (2015) Anaerobic digestion of pre-fermented potato peel wastes for methane production. Waste Manag 46: 197-200. doi: 10.1016/j.wasman.2015.09.029
|
| [39] | Datta R, Henry M (2006) Lactic acid: Recent advances in products, processes and technologies-a review. J Chem Technol Biotechnol: Int Res Process, Environ Clean Technol 81: 1119-1129. |
| [40] | Priyanga K, Reji A, Bhagat JK, et al. (2016) Production of organic manure from potato peel waste. Int J Chem Tech Res 9: 845-847. |
| [41] | Pandit N, Ahmad N, Maheshwari S, et al. (2012) Vermicomposting biotechnology an eco-loving approach for recycling of solid organic wastes into valuable biofertilizers. J Biofertil Biopestic 3: 1-8. |
| [42] | Muhondwa J, Martienssen M, Burkhardt M, et al. (2015) Feasibility of anaerobic digestion of potato peels for biogas as mitigation of greenhouse gases emission potential. Int J Environ Res 9: 481-488 |
| [43] |
Tiwari V, Maji S, Kumar S, et al. (2016) Use of kitchen waste based bio-organics for strawberry (Fragaria x ananassa Duch) production. Afr J Agric Res 11: 259-265. doi: 10.5897/AJAR2015.10349
|
| [44] |
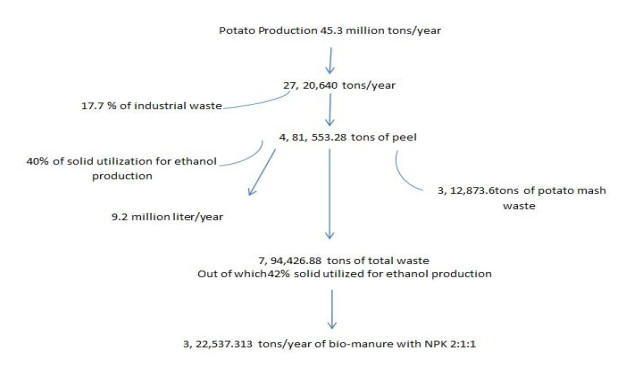
Chintagunta AD, Jacob S, Banerjee R, et al. (2016) Integrated bioethanol and biomanure production from potato waste. Waste Manag 49: 320-325. doi: 10.1016/j.wasman.2015.08.010
|
| [45] |
Shukla J, Kar R (2006) Potato peel as a solid state substrate for thermostable α-amylase production by thermophilic Bacillus isolates. World J Microb Biot 22: 417-422. doi: 10.1007/s11274-005-9049-5
|
| [46] | Jadhav SA, Kataria PK, Bhise KK, et al. (2013) Amylase production from potato and banana peel waste. Int J Curr Microbiol App Sci 2: 410-414. |
| [47] | Mabrouk ME, El Ahwany AM (2008) Production of 946-mannanase by Bacillus amylolequifaciens 10A1 cultured on potato peels. Afr J Biotechnol 7: 1123-1128. |
| [48] |
Dos Santos TC, Gomes DPP, Bonomo RCF, et al. (2012) Optimisation of solid state fermentation of potato peel for the production of cellulolytic enzymes. Food Chem 133: 1299-1304. doi: 10.1016/j.foodchem.2011.11.115
|
| [49] |
Mukherjee S, Bandyopadhayay B, Basak B, et al. (2012) An improved method of optimizing the extraction of polyphenol oxidase from potato (Solanum tuberosum L.) Peel. Not Sci Biol 4: 98-107. doi: 10.15835/nsb417186
|
| [50] |
Niphadkar SS, Vetal MD, Rathod VK, et al. (2015) Purification and characterization of polyphenol oxidase from waste potato peel by aqueous two-phase extraction. Prep Biochem Biotechnol 45: 632-649. doi: 10.1080/10826068.2014.940970
|
| [51] | Da Silva Batista M, Guimarães CO, Marra LC, et al. (2015) Bio-oil production from waste potato peel and rice hush. Rev Eletrônica Gest Educ Tecnol 19: 220-227. |
| [52] |
Izmirlioglu G, Demirci A (2012) Ethanol production from waste potato mash by using Saccharomyces cerevisiae. Appl Sci 2: 738-753. doi: 10.3390/app2040738
|
| [53] | Afsar N, Özgür E, Gürgan M, et al. (2011) Hydrogen productivity of photosynthetic bacteria on dark fermenter effluent of potato steam peels hydrolysate. Int J Hydrogen Energ36: 432-438. |
| [54] |
Panagiotopoulos IA, Karaoglanoglou LS, Koullas DP, et al. (2015) Technical suitability mapping of feedstocks for biological hydrogen production. J Clean Prod 102: 521-528. doi: 10.1016/j.jclepro.2015.04.055
|
| [55] |
Im HW, Suh BS, Lee SU, et al. (2008) Analysis of phenolic compounds by high-performance liquid chromatography and liquid chromatography/mass spectrometry in potato plant flowers, leaves, stems, and tubers and in home-processed potatoes. J Agric Food Chem 56: 3341-3349. doi: 10.1021/jf073476b
|
| [56] | Lee J, Finn CE (2007) Anthocyanins and other polyphenolics in American elderberry (Sambucus canadensis) and European elderberry (S. nigra) cultivars. J Sci Food Agric87: 2665-2675. |
| [57] | Rodríguez-Meizoso I, Marin FR, Herrero M, et al. (2006) Subcritical water extraction of nutraceuticals with antioxidant activity from oregano. Chemical and functional characterization. J Pharmaceut Biomed 41: 1560-1565. |
| [58] |
Yeung YY, Hong S, Corey EJ, et al. (2006) A short enantioselective pathway for the synthesis of the anti-influenza neuramidase inhibitor oseltamivir from 1,3-butadiene and acrylic acid. J Am Chem Soc 128: 6310-6311. doi: 10.1021/ja0616433
|
| [59] |
Mansour EH, Khalil AH (2000) Evaluation of antioxidant activity of some plant extracts and their application to ground beef patties. Food Chem 69: 135-141. doi: 10.1016/S0308-8146(99)00234-4
|
| [60] |
Kanatt SR, Chander R, Radhakrishna P, et al. (2005) Potato peel extract a natural antioxidant for retarding lipid peroxidation in radiation processed lamb meat. J Agric Food Chem 53: 1499-1504. doi: 10.1021/jf048270e
|
| [61] |
Formanek Z, Lynch A, Galvin K, et al. (2003) Combined effects of irradiation and the use of natural antioxidants on the shelf-life stability of overwrapped minced beef. Meat Sci 63: 433-440. doi: 10.1016/S0309-1740(02)00063-3
|
| [62] |
Mohdaly AA, Sarhan MA, Smetanska I, et al. (2010) Antioxidant properties of various solvent extracts of potato peel, sugar beet pulp and sesame cake. J Sci Food Agric 90: 218-226. doi: 10.1002/jsfa.3796
|
| [63] | Rommi K, Rahikainen J, Vartiainen J, et al. (2016) Potato peeling costreams as raw materials for biopolymer film preparation. J Appl Polym Sci 133: 1-11. |
| [64] |
Nara K, Miyoshi T, Honma T, et al. (2006) Antioxidative activity of bound-form phenolics in potato peel. Biosci Biotechnol Biochem 70: 1489-1491. doi: 10.1271/bbb.50552
|
| [65] |
Arun K, Chandran J, Dhanya R, et al. (2015) Comparative evaluation of antioxidant and antidiabetic potential of peel from young and matured potato. Food Biosci 9: 36-46. doi: 10.1016/j.fbio.2014.10.003
|
| [66] | Shimoi K, Okitsu A, Green M, et al. (2001) Oxidative DNA damage induced by high glucose and its suppression in human umbilical vein endothelial cells. Mutat Res-Fund Mol M 480: 371-378. |
| [67] | Singh N, Kamath V, Rajini P, et al. (2005) Attenuation of hyperglycemia and associated biochemical parameters in STZ-induced diabetic rats by dietary supplementation of potato peel powder. Clin Chim Acta353: 165-175. |
| [68] | El Bohi KM, Hashimoto Y, Muzandu K, et al. (2009) Protective effect of Pleurotus cornucopiae mushroom extract on carbon tetrachloride-induced hepatotoxicity. Jpn J Vet Res 57: 109-118. |
| [69] |
Singh N, Rajini P (2008) Antioxidant-mediated protective effect of potato peel extract in erythrocytes against oxidative damage. Chem Biol Interact 173: 97-104. doi: 10.1016/j.cbi.2008.03.008
|
| [70] |
Jaeschke H, Gores GJ, Cederbaum AI, et al. (2002) Mechanisms of hepatotoxicity. Toxicol Sci 65: 166-176. doi: 10.1093/toxsci/65.2.166
|
| [71] |
Tasaduq S, Singh K, Sethi S, et al. (2003) Hepatocurative and antioxidant profile of HP-1, a polyherbal phytomedicine. Hum Exp Toxicol 22: 639-645. doi: 10.1191/0960327103ht406oa
|
| [72] |
Mohammed NMS, Salim HAM (2017) Adsorption of Cr (Vi) ion from aqueous solutions by solid waste of potato peels. Sci J Uni Zakho 5: 254-258. doi: 10.25271/2017.5.3.392
|
| [73] |
Bibi S, Farooqi A, Yasmin A, et al. (2017) Arsenic and fluoride removal by potato peel and rice husk (PPRH) ash in aqueous environments. Int J Phytoremediat 19: 1029-1036. doi: 10.1080/15226514.2017.1319329
|
| [74] | Guechi EK, Hamdaoui O (2016) Evaluation of potato peel as a novel adsorbent for the removal of Cu (Ⅱ) from aqueous solutions: equilibrium, kinetic, and thermodynamic studies. Desalin Water Treat57: 10677-10688. |
| [75] |
Kyzas GZ, Deliyanni EA, Matis KA, et al. (2016) Activated carbons produced by pyrolysis of waste potato peels: Cobalt ions removal by adsorption. Colloids Surf, A 490: 74-83. doi: 10.1016/j.colsurfa.2015.11.038
|
| [76] | Mahale KK, Mokhasi HR, Ashoka H, et al. (2016) Biosorption of nickel (Ⅱ) from aqueous solutions using potato peel. Res J Chem Environ Sci 4: 96-101. |
| [77] | Mutongo F, Kuipa O, Kuipa PK, et al. (2014) Removal of Cr (VI) from aqueous solutions using powder of potato peelings as a low cost sorbent. Bioinorg Chem Appl 2014: 1-7. |
Figures(2) / Tables(2)

Ahsan Javed, Awais Ahmad, Ali Tahir, Umair Shabbir, Muhammad Nouman, Adeela Hameed. Potato peel waste-its nutraceutical, industrial and biotechnological applacations[J]. AIMS Agriculture and Food, 2019, 4(3): 807-823. doi: 10.3934/agrfood.2019.3.807







 DownLoad:
DownLoad: