Citation: Aleksander S. Gundersen, Ragnhild C. Hansen, Tom Lunne, Jean-Sebastien L’Heureux, Stein O. Strandvik. Characterization and engineering properties of the NGTS Onsøy soft clay site[J]. AIMS Geosciences, 2019, 5(3): 665-703. doi: 10.3934/geosci.2019.3.665

| [1] | NGI (1965) Grunnundersøkelse i forbindelse med planlagt forsøksfelt på Presterød ved Tønsberg. Report No.: F.281 [in Norwegian]. Oslo: Norwegian Geotechnical Institute. |
| [2] | NGI (1968) Undersøkelser efter mulige forsøksfelter for skjærboks og K0 pel. Report No.: F.281-8 (rapport 2) [in Norwegian]. Oslo: Norwegian Geotechnical Institute. |
| [3] | Lunne T, Andersen KH, Yang S, et al. (2012) Undrained shear strength for foundation design at the Luva deep water field in the Norwegian Sea. Geotechnical and geophysical site characterization 4: 1105–1114. |
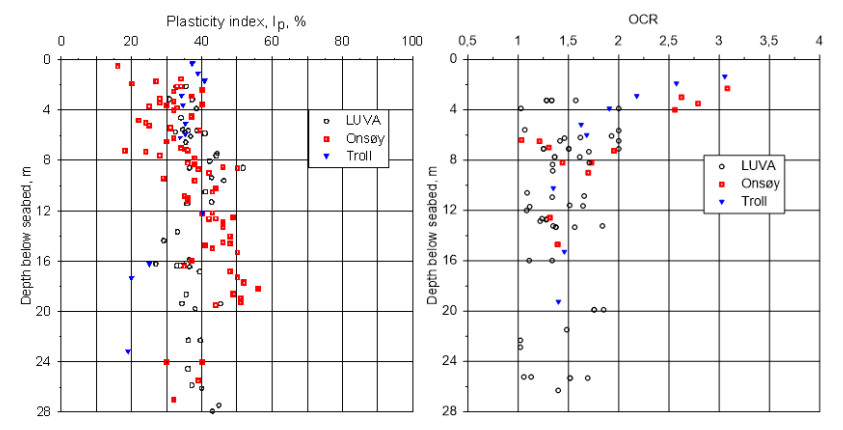
| [4] | Lunne T, Long M, Forsberg CF (2003) Characterisation and engineering properties of Onsøy clay. Charact Eng Prop Nat Soils 1: 395–427. |
| [5] | ISO (2014) Petroleum and natural gas industries-Specific requirements for offshore structures. Part 8: Marine soil investigations (ISO 19901-8). Geneva, Switzerland: International Organization for Standardization. |
| [6] | NGI (2018) Norwegian GeoTest Sites-Field and laboratory test results from NGTS soft clay site-Onsøy. Report No.: 20160154-10-R. Rev. 1. Oslo: Norwegian Geotechnical Institute. |
| [7] | NGF (1989) Melding 7: Veiledning for utførelse av dreietrykksondering. Rev.1 [in Norwegian]. Oslo: Norwegian Geotechnical Society. |
| [8] | ISO (2012) Geotechnical investigation and testing-Field testing. Part 1: Electrical cone and piezocone penetration test (ISO 22476-1). Geneva, Switzerland: International Organization for Standardization. |
| [9] | ISO (2017) Geotechnical investigation and testing-Field testing. Part 11: Flat dilatometer test (ISO 22476-11). Geneva, Switzerland: International Organization for Standardization. |
| [10] | ISO (2012) Geotechnical investigation and testing-Field testing. Part 5: Flexible dilatometer test (ISO 22476-5). Geneva, Switzerland: International Organization for Standardization. |
| [11] | NGF (2017) Melding 6: Veiledning for måling av grunnvannsstand og poretrykk. Rev. 2 [In Norwegian] Oslo: Norwegian Geotechnical Society. |
| [12] | NGF (1989) Melding 4: Veiledning for utførelse av vingeboring. Rev. 1 [in Norwegian]. Oslo: Norwegian Geotechnical Society. |
| [13] | Bjerrum L, Andersen KH (1972) In-situ measurements of lateral pressures in clay. European Conference on Soil Mechanics and Foundation Engineering, 5 Madrid 1972 Proceedings. Madrid: Sociedad Española de Mecánica del Suelo y Cimentaciones. |
| [14] | NGF (2013) Melding 11: Veiledning for prøvetaking [In Norwegian]. Oslo: Norwegian Geotechnical Society. |
| [15] |
Lefebvre G, Poulin C (1979) A new method of sampling in sensitive clay. Can Geotech J 16: 226–233. doi: 10.1139/t79-019

|
| [16] | NGI (2017) Testing of new samplers for SWORD. Evaluation of sample quality-phase 2 and 3. Report No.: 20150530-02-R. Rev. 1. |
| [17] | ISO (2014) Geotechnical investigation and testing-Laboratory testing of soil. Part 1: Determination of water content (ISO 17892-1). Geneva, Switzerland: International Organization for Standardization. |
| [18] | ISO (2014) Geotechnical investigation and testing-Laboratory testing of soil. Part 2: Determination of bulk density (ISO 17892-2). Geneva, Switzerland: International Organization for Standardization. |
| [19] | ISO (2015) Geotechnical investigation and testing-Laboratory testing of soil. Part 3: Determination of particle density (ISO 17892-3). Geneva, Switzerland: International Organization for Standardization. |
| [20] | ISO (2018) Geotechnical investigation and testing-Laboratory testing of soil. Part 12: Determination of liquid and plastic limits (ISO 17892-12). Geneva, Switzerland: International Organization for Standardization. |
| [21] |
Moum J (1965) Falling drop used for grain-size analysis of fine-grained materials. Sedimentology 5: 343–347. doi: 10.1111/j.1365-3091.1965.tb01566.x
|
| [22] | ISO (2016) Geotechnical investigation and testing-Laboratory testing of soil. Part 4: Determination of particle size distribution (ISO 17892-4). Geneva, Switzerland: International Organization for Standardization. |
| [23] | NS (1988) Geotechnical testing-Laboratory methods. Determination of undrained shear strength by fall-cone testing (NS 8015). Oslo: Standards Norway. |
| [24] | ISO (1994) Soil quality. Determination of the specific electrical conductivity (ISO 11265). Geneva, Switzerland: International Organization for Standardization. |
| [25] | ISO (2017) Geotechnical investigation and testing-Laboratory testing of soil. Part 5: Incremental loading oedometer test (ISO 17892-5) Geneva, Switzerland: International Organization for Standardization. |
| [26] | Sandbækken G, Berre T, Lacasse S (1986) Oedometer Testing at The Norwegian Geotechnical Institute. In: Yong RN, Townsend FC, editors. Consolidation of soils: testing and evaluation, STP 892, American Society for Testing and Materials, 329–353. |
| [27] | NS (1993) Geotechnical testing-Laboratory methods. Determination of one-dimensional consolidation properties by oedometer testing-Method using continuous loading (NS 8018). Oslo: Standards Norway. |
| [28] | ISO (2004) Geotechnical investigation and testing-Laboratory testing of soil. Part 11: Determination of permeability by constant and falling head (ISO 17892-11). Geneva, Switzerland: International Organization for Standardization. |
| [29] |
Berre T (1982) Triaxial Testing at the Norwegian Geotechnical Institute. Geotech Test J 5: 3–17. doi: 10.1520/GTJ10794J
|
| [30] | ISO (2018) Geotechnical investigation and testing-Laboratory testing of soil. Part 9: Consolidated triaxial compression tests on water saturated soils (ISO 17892-9). Geneva, Switzerland: International Organization for Standardization. |
| [31] |
Bjerrum L, Landva A (1966) Direct Simple-Shear Tests on a Norwegian Quick Clay. Géotechnique 16: 1–20. doi: 10.1680/geot.1966.16.1.1
|
| [32] | ASTM (2015) Standard Test Method for Consolidated Undrained Direct Simple Shear Testing of Fine Grain Soils (ASTM D6528-17). West Conshohocken, PA: ASTM International. |
| [33] | Dyvik R, Madshus C (1985) Lab measurements of G max using bender elements. In: Khosla V, editor. Advances in the Art of Testing Soils under Cyclic Conditions: Proceedings of a Session in Conjunction with the ASCE Convention in Detroit, Michigan 1985, New York: American Society of Civil Engineers, 186–196. |
| [34] | Dyvik R, Olsen T (1989) Gmax measured in oedometer and DSS tests using bender elements. Proceedings to the 12th International Conference on Soil Mechanics and Foundation Engineering. Rio de Janeiro, Brazil, 39–42. |
| [35] | Sørensen R (1979) Late Weichselian deglaciation in the Oslofjord area, south Norway. Boreas 8: 241–246. |
| [36] | Rise L, Bøe R, Sveian H, et al. (2006) The deglaciation history of Trondheimsfjorden and Trondheimsleia, Central Norway. Nor J Geol/Nor Geol Foren 86. |
| [37] |
Kenney TC (1964) Sea-Level Movements and the Geologic Histories of the Post-Glacial Marine Soils at Boston, Nicolet, Ottawa and Oslo. Géotechnique 14: 203–230. doi: 10.1680/geot.1964.14.3.203
|
| [38] |
Vereș DȘ (2002) A comparative study between loss on ignition and total carbon analysis on mineralogenic sediments. Stud UBB Geol 47: 171–182. doi: 10.5038/1937-8602.47.1.13
|
| [39] | ISO (2017) Geotechnical investigation and testing-Identification and classification of soil. Part 2: Principles for a classification (ISO 14688-2:2017). Geneva, Switzerland: International Organization for Standardization. |
| [40] | Zolitschka B, Mingram J, Van Der Gaast S, et al. (2002) Sediment logging techniques. Tracking environmental change using lake sediments, Springer, 137–153. |
| [41] | BSI (1999) Code of practice for site investigations (BS 5930). London, United Kingdom: British Standard Institute. |
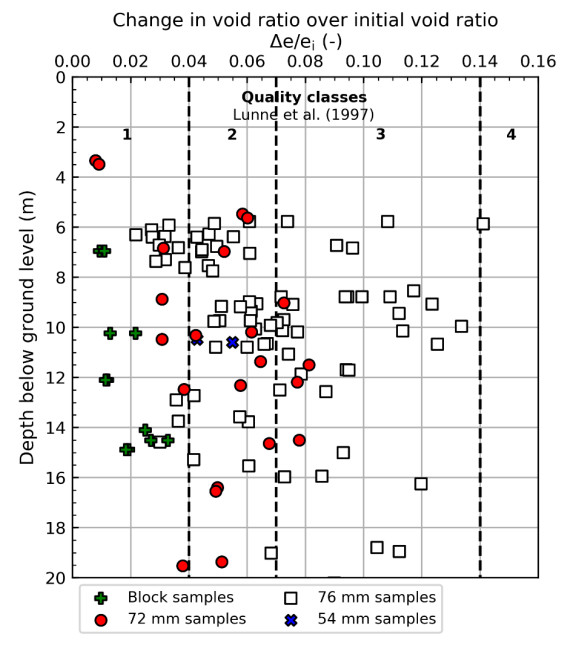
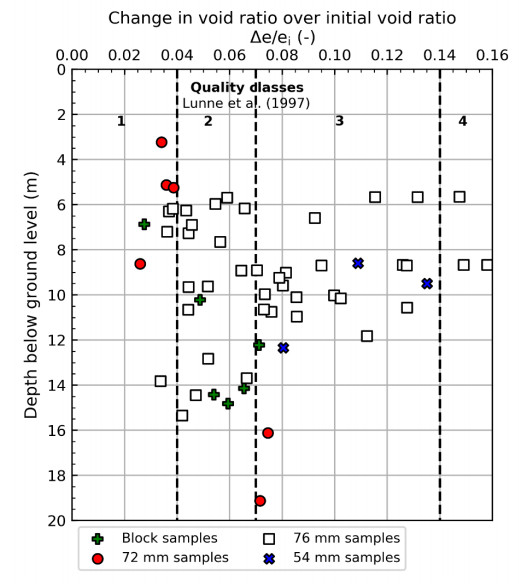
| [42] | Lunne T, Berre T, Strandvik S (1997) Sample disturbance effects in soft low plastic Norwegian clay. Symposium on Recent Developments in Soil and Pavement Mechanics. Rio de Janeiro. |
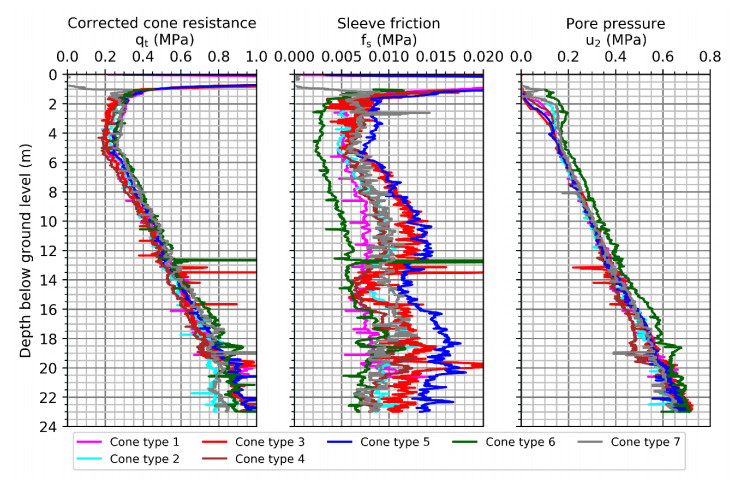
| [43] | NGI (2018) Norwegian GeoTest Sites-Impact of cone penetrometer type on CPTU results at 4 NGTS sites-silt, soft clay, sand and quick clay. Report No.: 20160154-21-R. Oslo: Norwegian Geotechnical Institute. |
| [44] | Lunne T, Berre T, Andersen KH, et al. (2008) Effects of sample disturbance on consolidation behaviour of soft marine Norwegian clays. In: Huang A, Mayne P, editors. 3rd International Conference on Site Characterization, Taipei, Taiwan, 1471–1479. |
| [45] | Marchetti S, Monaco P, Totani G, et al. (2001) The flat dilatometer test (DMT) in soil investigations. A report by the ISSMGE Technical Committee 16 on Ground Property Characterisation from In-situ Testing. International Conference on Insitu Measurement of Soil Properties. Bali, Indonesia, 95–131. |
| [46] | Marchetti S (1980) In situ tests by flat dilatometer. J Geotech Eng Div 106: 299–321. |
| [47] | Lunne T, Powell JJ, Robertson PK (1997) Cone penetration testing in geotechnical practice. CRC Press. |
| [48] |
Marsland A, Randolph MF (1977) Comparison of the results from pressuremeter tests and large in situ plate tests in London Clay. Géotechnique 27: 455–477. doi: 10.1680/geot.1977.27.4.455
|
| [49] | Bjerrum L, Andersen KH (1972) In-situ measurement of lateral pressures in clay. Nor Geotech Inst Publ, 29–38. |
| [50] | Aas G, Lacasse S, Lunne T, et al. (1986) Use of in situ tests for foundation design on clay. Use of In Situ Tests in Geotechnical Engineering, 1–30. |
| [51] |
Brooker EW, Ireland HO (1965) Earth pressures at rest related to stress history. Can Geotech J 2: 1–15. doi: 10.1139/t65-001
|
| [52] | Mayne P, Kulhawy FH (1982) K0–OCR relationships in soil. J Geotech Eng Div 108: 851–872. |
| [53] | L'Heureux JS, Ozkul Z, Lacasse S, et al. (2017) Bestemmelse av hviletrykk (K0) i norske leirer-anbefalinger basert på en sammenstilling av lab-, felt-og erfaringsdata [in Norwegian]. Geoteknikkdagen 2017, Oslo, Norway. |
| [54] | NGI (2019) Norwegian GeoTest Sites-Interpreted test results from NGTS soft clay site-Onsøy. Report No.: 20160154-11-R. Rev. 0. |
| [55] | NGI (2006) Shear strength parameters determined by in situ tests for deep water soft soils. Summary Report/Manual. Report No.: 20041618-6. Oslo: Norwegian Geotechnical Institute. |
| [56] | Karlsrud K, Lunne T, Kort DA, et al. (2005) CPTU correlations for clays. Proceedings of the 16th international conference on soil mechanics and geotechnical engineering. Osaka, Japan, 693–702. |
| [57] | NVE (2014) En omforent anbefaling for bruk av anisotropifaktorer i prosjektering i norske leirer [In Norwegian]. Report No.: 14/2014. NVE, Statens vegvesen, Jernbaneverket. |
| [58] |
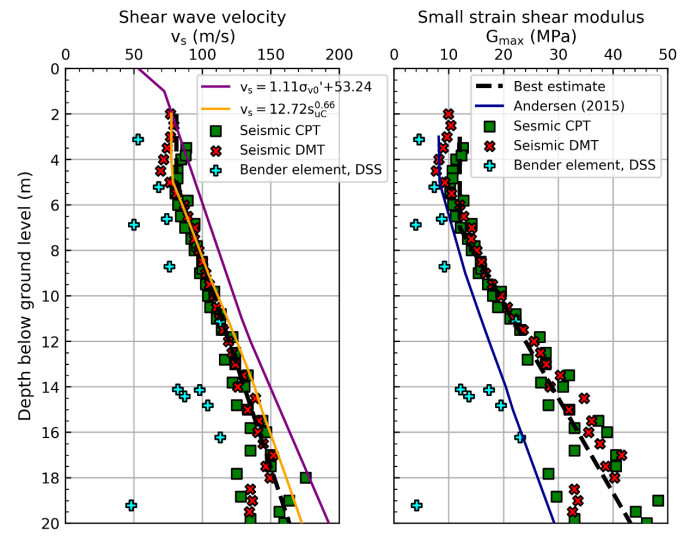
L'Heureux JS, Long M (2017) Relationship between shear-wave velocity and geotechnical parameters for Norwegian clays. J Geotech Geoenviron Eng 143: 04017013. doi: 10.1061/(ASCE)GT.1943-5606.0001645
|
| [59] | Andersen KH (2015) Cyclic soil parameters for offshore foundation design. In: Meyer V, editor. Frontiers in offshore geotechnics III, ISFOG 2015. Oslo: Taylor & Francis Group, London, 5–82. |
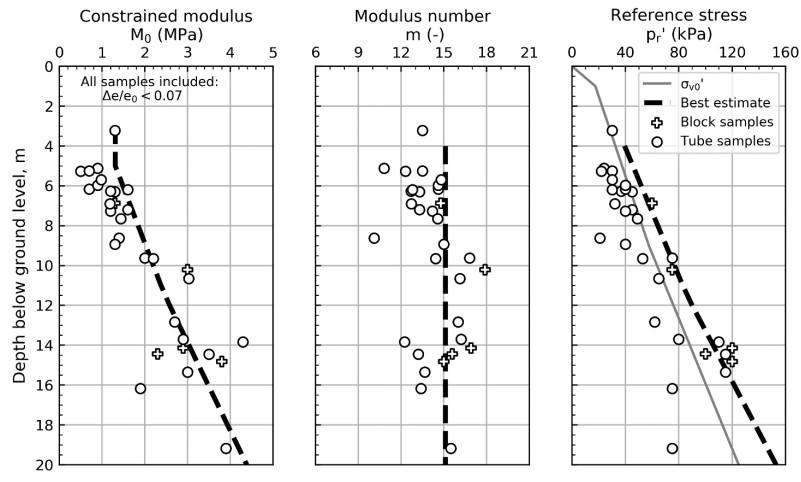
| [60] | Janbu N (1963) Soil compressibility as determined by odometer and triaxial tests. European Conference on Soil Mechanics and Foundation Engineering, Proceedings. Wiesbaden, 19–25. |
| [61] | Mitchell JK, Soga K (2005) Fundamentals of soil behavior. Third Edition, John Wiley & Sons New York. |
| [62] |
Karlsrud K, Hernandez-Martinez FG (2013) Strength and deformation properties of Norwegian clays from laboratory tests on high-quality block samples. Can Geotech J 50: 1273–1293. doi: 10.1139/cgj-2013-0298
|
| [63] | Lunne T, Strandvik S, Kåsin K, et al. (2018) Effect of cone penetrometer type on CPTU results at a soft clay test site in Norway. Cone Penetration Testing IV: Proceedings of the 4th International Symposium on Cone Penetration Testing (CPT 2018), Delft, The Netherlands. |
| [64] | Powell JJ, Lunne T (2005) A comparison of different sized piezocones in UK clays. Proceedings of the 16th International Conference on Soil Mechanics and Geotechnical Engineering. Osaka, Japan, 729–734. |
| [65] | Cabal K, Robertson PK (2014) Accuracy and Repeatability of CPT Sleeve Friction Measurements. Proceedings of the 3rd International Symposium on Cone Penetration Testing (CPT'14). Las Vegas, Nevada, USA. |
| [66] | Berre T (1974) Belastningsforsak på plastisk leire i Onsøy [In Norwegian]. Nor Geotech Inst Publ 102: 21–30. |
| [67] | Berre T (2013) Test fill on soft plastic marine clay at Onsøy, Norway. Can Geotech J 51: 30–50. |
| [68] | Berre T (2017) Test fill brought to failure on soft plastic marine clay at Onsøy, Norway. Can Geotech J 55: 563–576. |
| [69] | Karlsrud K (2012) Prediction of load-displacement behavior and capacity of axially loaded piles in clay based on analyses and interpretation of pile load test results (Doctoral dissertation). Norwegian University of Science and Technology. |
| [70] | Dahlberg R, Strøm PJ (1999) Unique onshore tests of deepwater drag-in plate anchors. Offshore Technology Conference. Houston, Texas, USA. |
| [71] | Heyerdahl H, Eklund T (2001) Testing of plate anchors. Proc Offshore Technology Conference. Houston, Texas, USA. |
| [72] | Karlsrud K, Jensen TG, Lied EKW, et al. (2014) Significant ageing effects for axially loaded piles in sand and clay verified by new field load tests. Offshore Technology Conference, Houston, Texas, USA. |

Figures(27) / Tables(2)

Aleksander S. Gundersen, Ragnhild C. Hansen, Tom Lunne, Jean-Sebastien L’Heureux, Stein O. Strandvik. Characterization and engineering properties of the NGTS Onsøy soft clay site[J]. AIMS Geosciences, 2019, 5(3): 665-703. doi: 10.3934/geosci.2019.3.665







 DownLoad:
DownLoad: