Citation: Paul W. Mayne, Ethan Cargill, Bruce Miller. Geotechnical characteristics of sensitive Leda clay at Canada test site in Gloucester, Ontario[J]. AIMS Geosciences, 2019, 5(3): 390-411. doi: 10.3934/geosci.2019.3.390

| [1] | Brooks GR (2014) Prehistoric sensitive clay landslides and paleoseismicity in the Ottawa valley, Canada. Landslides in Sensitive Clays: From Geosciences to Risk Management, Springer, London, 119–131. |
| [2] | Demers D, Robitailler D, Locat P, et al. (2014) Inventory of large landslides in sensitive clay in the province of Quebec. Landslides in Sensitive Clays: From Geosciences to Risk Management, Springer, London, 77–90. |
| [3] |
McRostie GC, Crawford CB (2001) Canadian Geotechnical Research Site No. 1 at Gloucester. Can Geotech J 38: 1134–1141. doi: 10.1139/t01-025

|
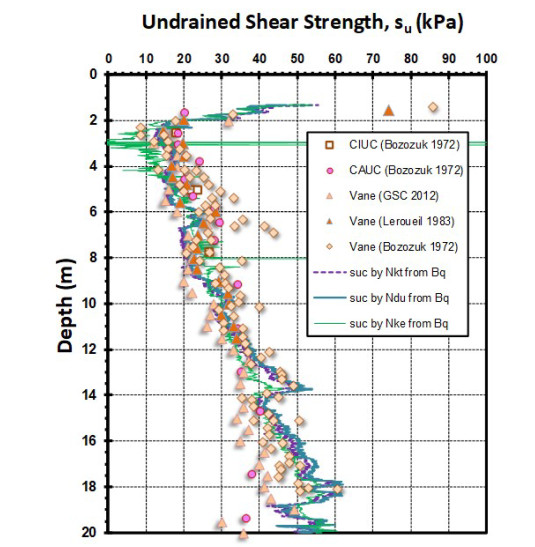
| [4] | Bozozuk M (1972) The Gloucester test fill. PhD Dissertation, Department of Civil Engineering, Purdue University, West Layfayette, IN, 184. |
| [5] | Bozozuk M, Leonards GA (1972) The Gloucester test fill. Performance of Earth and Earth-Supported Structures, Part 1 (Proc. Spec. Conf. Purdue Univ.), ASCE, Reston, VA, 1: 299–317. |
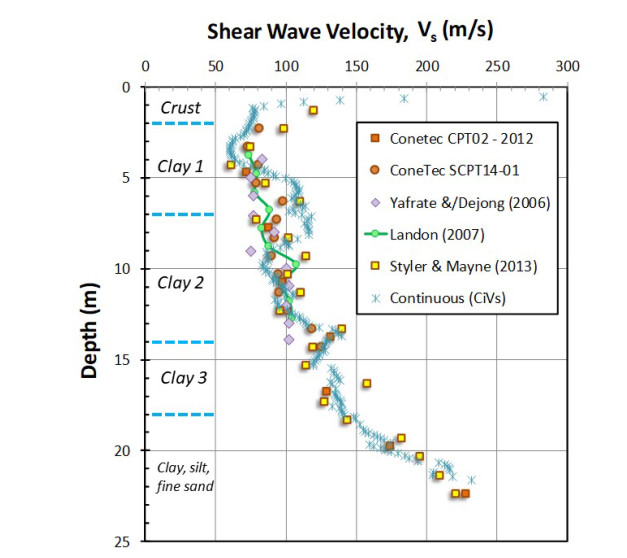
| [6] | Yafrate NJ, DeJong JT (2006) Interpretation of sensitivity and remolded undrained shear strength with full-flow penetrometers. Proceedings International Society for Offshore and Polar Engineering (ISOPE-06, San Francisco), 572–577. |
| [7] |
Leroueil S, Samson L, Bozozuk M (1983) Laboratory and field determination of preconsolidation pressures at Gloucester. Can Geotech J 20: 477–490. doi: 10.1139/t83-056
|
| [8] | Landon ME (2007) Development of a non-destructive sample quality assessment method for soft clays, PhD Dissertation, University Massachusetts Amherst, Department Civil & Environmental Engineering, 647. |
| [9] | Perrier D (2016) Email communication and data transmission from Geological Survey of Canada, Quebec City (26 March 2016). |
| [10] |
Konrad JM (1987) Piezo-friction-cone penetrometer testing in soft clays. Can Geotech J 24: 645–652. doi: 10.1139/t87-078
|
| [11] |
Agaiby SS, Mayne PW (2018) Interpretation of piezocone penetration and dissipation tests in sensitive Leda Clay at Gloucester Test Site. Can Geotech J 55: 1781–1794. doi: 10.1139/cgj-2017-0388
|
| [12] | Nader A, Hache R, Fall M (2013) Cone and ball penetration tests in Ottawa's sensitive marine clays. Proceedings GeoMontreal 2013, 66th Canadian Geotechnical Conference, Canadian Geotechnical Society, 519. |
| [13] | McQueen W, Miller B, Mayne PW, et al. (2015) Piezocone dissipation tests at the Canadian Test Site No. 1, Gloucester, Ontario. Can Geotech J 53: 884–888. |
| [14] | Styler MA, Mayne PW (2013) Site investigation using continuous shear wave velocity measurements during cone penetration testing at Gloucester, Ontario. Proceedings, GeoMontreal: 66th Canadian Geotechnical Conference, 345. |
| [15] | Bechai M, Law KT, Craig CBH, et al. (1986) In-situ testing of marine clay for towerline foundations. Proceedings 39th Canadian Geotechnical Conference, Ottawa, 115–122. |
| [16] | Lutenegger AJ, Timian DA (1986) Flat plate penetrometer tests in marine clays. Proceedings 39th Canadian Geotechnical Conference, Ottawa, 301–309. |
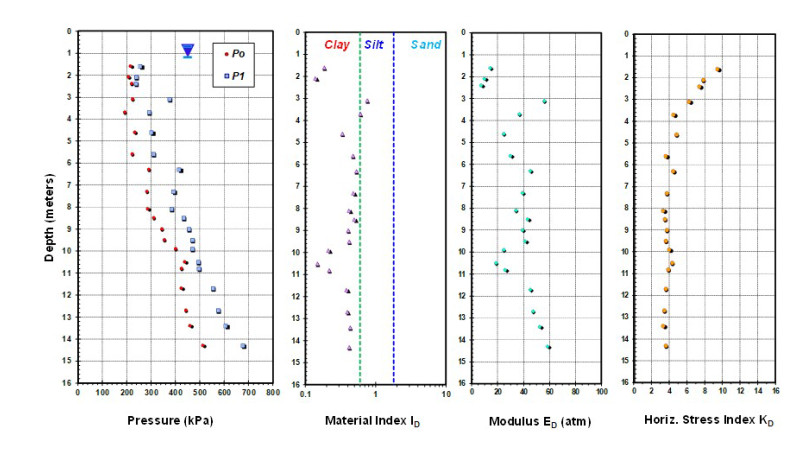
| [17] | Lutenegger AJ (2015) Dilatometer tests in sensitive Champlain Sea clay: stress history and shear strength. Proceedings 3rd International Conference on the Flat Dilatometer, Rome. |
| [18] | Yafrate NJ, DeJong JT (2007) Influence of penetration rate on measured resistance with full flow penetrometers in soft clay. Proceedings GeoDenver, ASCE GSP, Reston, VA. |
| [19] |
Nader A, Fall M, Hache R (2015) Characterization of sensitive marine clays by using cone and ball penetrometers: example of clays in Eastern Canada. Geotech Geol Eng 33: 841–864. doi: 10.1007/s10706-015-9864-x
|
| [20] |
Eden WJ, Law KT (1980) Comparison of Undrained shear strength results obtained by different test methods in soft clays. Can Geotech J 17: 369–381. doi: 10.1139/t80-044
|
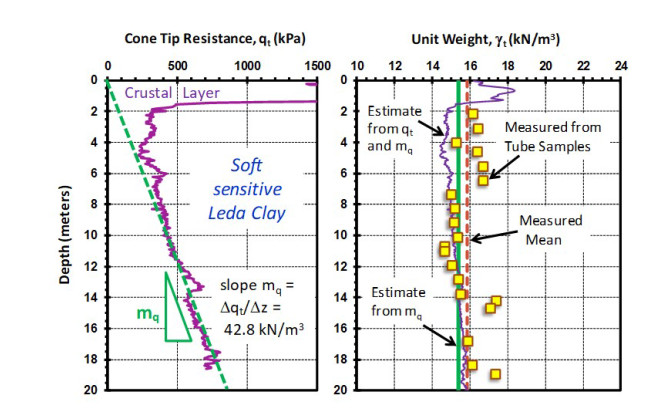
| [21] | Mayne PW, Peuchen J (2012) Unit weight trends with cone resistance in soft to firm clays. Geotechnical and Geophysical Site Characterization 4 (Proc. ISC-4, Pernambuco), CRC Press, London, 1: 903–910. |
| [22] | Mayne PW, Peuchen J (2018) Evaluation of CPTU Nkt cone factor for undrained strength of clays. Proceedings 4th International Symposium on Cone Penetration Testing (Technical Univ. Delft), CRC Press/Balkema, 423–430. |
| [23] | Agaiby SSW (2018) Advancements in the interpretation of seismic piezocone tests in clays and other geomaterials. PhD dissertation, School of Civil & Environmental Engineering, Georgia Institute of Technology, Atlanta, GA: 923. |
| [24] | Mayne PW, Robertson PK, Lunne T (1998) Clay stress history evaluated from seismic piezocone tests. Geotech Site Charact (Proc. ISC-1, Atlanta), Balkema, Rotterdam, 2: 1113–1118. |
| [25] | Mayne PW (2007) NCHRP Synthesis 368 on Cone Penetration Test. Transportation Research Board, National Academies Press, Washington, DC, 118. |
| [26] | Burns SE, Mayne PW (2002) Analytical cavity expansion-critical state model for piezocone dissipation in fine-grained soils. Soils Found 42: 131–137. |
| [27] | Law KT (1975) Analysis of embankments on sensitive clays. PhD Dissertation, The University of Western Ontario, 521. |
| [28] |
Lo KY, Bozozuk M, Law KT (1976) Settlement analysis of the Gloucester test fill. Can Geotech J 13: 339–354. doi: 10.1139/t76-036
|
| [29] |
Hinchberger SD, Rowe RK (1998) Modelling the rate-sensitive characteristics of the Gloucester foundation soil. Can Geotech J 35: 769–789. doi: 10.1139/t98-037
|
| [30] | Radharkrishna HS, Cragg CBH, Tsang R, et al. (1986) Uplift and compression behavior of drilled piers in Leda clay. Proceedings 39th Canadian Geotechnical Conference, Ottawa, 123–130. |
| [31] | Hosseini MA, Rayhani MT (2015) Evolution of pile shaft capacity over time in soft clays: Case study: Leda clay. Proceedings GeoQuebec: 68th Canadian Geot Conference, Paper ID 793. |
| [32] | Parez L, Faureil R (1988) Le piézocone. Améliorations apportées ála reconnsaissance de soils. Rev Fr Géotech 44: 13–27. |


Figures(23)

Paul W. Mayne, Ethan Cargill, Bruce Miller. Geotechnical characteristics of sensitive Leda clay at Canada test site in Gloucester, Ontario[J]. AIMS Geosciences, 2019, 5(3): 390-411. doi: 10.3934/geosci.2019.3.390







 DownLoad:
DownLoad: