Citation: Thomas Fauchez, Giada Arney, Ravi Kumar Kopparapu, Shawn Domagal Goldman. Explicit cloud representation in the Atmos 1D climate model for Earth and rocky planet applications[J]. AIMS Geosciences, 2018, 4(4): 180-191. doi: 10.3934/geosci.2018.4.180

| [1] |
Ramanathan V, Cess RD, Harrison EF, et al. (1989) Cloud-Radiative Forcing and Climate: Results from the Earth Radiation Budget Experiment. Sci 243: 57–63. doi: 10.1126/science.243.4887.57

|
| [2] |
Arney G, Meadows V, Crisp D, et al. (2014) Spatially resolved measurements of H2O, HCl, CO, OCS, SO2, cloud opacity, and acid concentration in the Venus near-infrared spectral windows. J Geophys Res Planets 119: 1860–1891. doi: 10.1002/2014JE004662
|
| [3] |
Charnay B, Forget F, Tobie G, et al. (2014) Titan's past and future: 3D modeling of a pure nitrogen atmosphere and geological implications. Icarus 241: 269–279. doi: 10.1016/j.icarus.2014.07.009
|
| [4] |
Kasting JF, Pollack JB, Crisp D (1984) Effects of high CO2 levels on surface temperature and atmospheric oxidation state of the early Earth. J Atmos Chem 1: 403–428. doi: 10.1007/BF00053803
|
| [5] |
Kasting JF, Ackerman TP (1986) Climatic consequences of very high carbon dioxide levels in the earth's early atmosphere. Sci 234: 1383–1385. doi: 10.1126/science.11539665
|
| [6] |
Kasting JF (1987) Theoretical constraints on oxygen and carbon dioxide concentrations in the Precambrian atmosphere. Precambrian Res 34: 205–229. doi: 10.1016/0301-9268(87)90001-5
|
| [7] |
Kasting JF (1988) Runaway and moist greenhouse atmospheres and the evolution of Earth and Venus. Icarus 74: 472–494. doi: 10.1016/0019-1035(88)90116-9
|
| [8] |
Kasting JF, Whitmire DP, Reynolds RT (1993) Habitable Zones around Main Sequence Stars. Icarus 101: 108–128. doi: 10.1006/icar.1993.1010
|
| [9] |
Kasting JF, Howard C, Kopparapu RK (2015) Stratospheric Temperatures and Water Loss from Moist Greenhouse Atmospheres of Earth-like Planets. The Astrophys J Lett 813: L3. doi: 10.1088/2041-8205/813/1/L3
|
| [10] |
Pavlov AA, Kasting JF, Brown LL, et al. (2000) Greenhouse warming by CH4 in the atmosphere of early Earth. J Geophys Res 105: 11981–11990. doi: 10.1029/1999JE001134
|
| [11] |
Pavlov AA, Hurtgen MT, Kasting JF, et al. (2003) Methane-rich Proterozoic atmosphere? Geology 31: 87–90. doi: 10.1130/0091-7613(2003)031<0087:MRPA>2.0.CO;2
|
| [12] |
Kasting JF, Howard MT (2006) Atmospheric composition and climate on the early Earth. Philos Trans R Soc Lond B Biol Sci 361: 1733–1742. doi: 10.1098/rstb.2006.1902
|
| [13] |
Haqq-Misra JD, Domagal-Goldman SD, Kasting PJ, et al. (2008) A revised, hazy methane greenhouse for the archean earth. Astrobiology 8: 1127–1137. doi: 10.1089/ast.2007.0197
|
| [14] |
Kopparapu RK, Ramirez R, Kasting J, et al. (2013) Habitable Zones around Main-sequence Stars: New Estimates. The Astrophys J 765: 131. doi: 10.1088/0004-637X/765/2/131
|
| [15] |
Arney G, Domagal-Goldman SD, Meadows VS, et al. (2016) The Pale Orange Dot: The Spectrum and Habitability of Hazy Archean Earth. Astrobiology 16: 873–899. doi: 10.1089/ast.2015.1422
|
| [16] |
Arney G, Meadows VS, Domagal-Goldman SD, et al. (2017) Pale Orange Dots: The Impact of Organic Haze on the Habitability and Detectability of Earthlike Exoplanets. The Astrophys J 836: 49. doi: 10.3847/1538-4357/836/1/49
|
| [17] | Way MJ, Aleinov I, Amundsen DS, et al. (2017) Resolving Orbital and Climate Keys of Earth and Extraterrestrial Environments with Dynamics (ROCKE-3D) 1.0: A General Circulation Model for Simulating the Climates of Rocky Planets. Astrophys J Suppl Ser 231: 12. |
| [18] |
Wordsworth RD, Forget F, Selsis F,et al. (2011) Gliese 581d is the First Discovered Terrestrial-mass Exoplanet in the Habitable Zone. The Astrophys J Lett 733: L48. doi: 10.1088/2041-8205/733/2/L48
|
| [19] | Neale RB, Richter JH, Conley AJ, et al. (2010) Description of the NCAR Community Atmosphere Model (CAM 4.0). NCAR. |
| [20] |
Helling C, Lee G, Dobbs-Dixon I, et al. (2016) The mineral clouds on HD 209458b and HD 189733b. Mon Not of the R Astron Soc 460: 855–883. doi: 10.1093/mnras/stw662
|
| [21] |
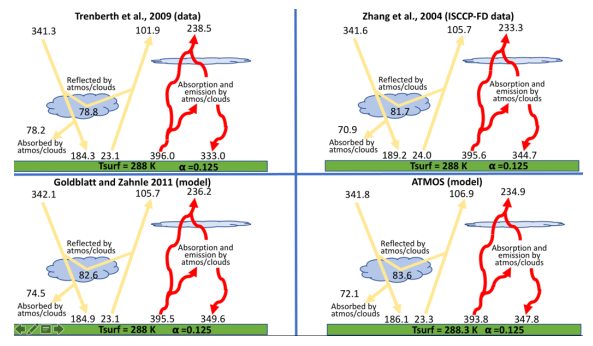
Goldblatt C, Zahnle KJ (2011) Clouds and the Faint Young Sun Paradox. Clim Past 7: 203–220. doi: 10.5194/cp-7-203-2011
|
| [22] | Boucher O, Randall D, Artaxo P, et al. (2013) Climate Change 2013: ThePhysical Science Basis. Contribution of Working Group I to the Fifth AssessmentReport of the Intergovernmental Panel on Climate Change. Cambridge: Cambridge University Press. |
| [23] |
Rossow WB, Schiffer RA (1999) Advances in Understanding Clouds from ISCCP. Bull of the Am Meteorol Soc 80: 2261–2288. doi: 10.1175/1520-0477(1999)080<2261:AIUCFI>2.0.CO;2
|
| [24] |
Rossow WB, Zhang Y, Wang J (2005) A Statistical Model of Cloud Vertical Structure Based on Reconciling Cloud Layer Amounts Inferred from Satellites and Radiosonde Humidity Profiles. J Climate 18: 3587–605. doi: 10.1175/JCLI3479.1
|
| [25] | Laurent C, Brogniez G, Doutriaux-Boucher M, et al. (2000) Modeling of light scattering in cirrus clouds with inhomogeneous hexagonal monocrystals. Comparison with in-situ and ADEOS-POLDER measurements. Geophys Res Lett 27: 113–116. |
| [26] | Yang P, Gaob BC, Baumc BA, et al. (2001) Radiative properties of cirrus clouds in the infrared (8–13µm ) spectral region. J of Quant Spectrosc & Radiat Transf 70: 473–504. |
| [27] |
Yang P, Wei H, Huang HL, et al. (2005) Scattering and absorption property database for nonspherical ice particles in the near- through far-infrared spectral region. App Opt 44: 5512–5523. doi: 10.1364/AO.44.005512
|
| [28] |
Yang P, Bi L, Baum BA, et al. (2013) Spectrally Consistent Scattering, Absorption, and Polarization Properties of Atmospheric Ice Crystals at Wavelengths from 0.2 to 100 μm. J of the Atmos Sci 70: 330–347. doi: 10.1175/JAS-D-12-039.1
|
| [29] | Baum BA, Yang P, Heymsfield AJ, et al. (2005) Bulk Scattering Properties for the Remote Sensing of Ice Clouds. Part II: Narrowband Models. J of Appl Meteorol 44: 1896–1911. |
| [30] |
Baum BA, Yang P, Heymsfield AJ, et al. (2011) Improvements in Shortwave Bulk Scattering and Absorption Models for the Remote Sensing of Ice Clouds. J of Appl Meteorol and Clim 50: 1037–1056. doi: 10.1175/2010JAMC2608.1
|
| [31] |
Baran AJ, Labonnote LC (2007) A self-consistent scattering model for cirrus. I: The solar region. Q J of the R Meteorol Soc 133: 1899–1912. doi: 10.1002/qj.164
|
| [32] |
Baran AJ, Connolly PJ, Lee C (2009) Testing an ensemble model of cirrus ice crystals using midlatitude in situ estimates of ice water content, volume extinction coefficient and the total solar optical depth. J of Quant Spectrosc and Radiat Trans 110: 1579–1598. doi: 10.1016/j.jqsrt.2009.02.021
|
| [33] |
Baran AJ (2012) From the single-scattering properties of ice crystals to climate prediction: A way forward. Atmos Res 112: 45–69. doi: 10.1016/j.atmosres.2012.04.010
|
| [34] | Baran AJ, Cotton R, Furtado K, et al. (2014) A self-consistent scattering model for cirrus. II: The high and low frequencies. Q J of the R Meteorol Soc 140: 1039–1057. |
| [35] |
Field PR, Heymsfield AJ, Bansemer A (2007) Snow Size Distribution Parameterization for Midlatitude and Tropical Ice Clouds. J of the Atmos Sci 64: 4346–4365. doi: 10.1175/2007JAS2344.1
|
| [36] | Sourdeval O, Laurent C, Baran AJ, et al. (2016) A methodology for simultaneous retrieval of ice and liquid water cloud properties. Part 2: Near-global retrievals and evaluation against A-Train products. Q J of the R Meteorol Soc 142: 3063–3081. |
| [37] |
Hogan RJ, Illingworth AJ (2000) Deriving cloud overlap statistics from radar. Q J of the R Meteorol Soc 126: 2903–2909. doi: 10.1002/qj.49712656914
|
| [38] |
Toon OB, McKay CP, Ackerman TP, et al. (1989) Rapid calculation of radiative heating rates and photodissociation rates in inhomogeneous multiple scattering atmospheres. J of Geophys Res: Atmos 94: 16287–16301. doi: 10.1029/JD094iD13p16287
|
| [39] |
Trenberth KE, Fasullo JT, Kiehl J (2009) Earth's Global Energy Budget. Bull of the Am Meteorol Soc 90: 311–324. doi: 10.1175/2008BAMS2634.1
|
| [40] | Zhang Y, Rossow WB, Lacis AA, et al. (2004) Calculation of radiative fluxes from the surface to top of atmosphere based on ISCCP and other global data sets: Refinements of the radiative transfer model and the input data. J of Geophys Res: Atmos 109. |
Figures(4) / Tables(3)

Thomas Fauchez, Giada Arney, Ravi Kumar Kopparapu, Shawn Domagal Goldman. Explicit cloud representation in the Atmos 1D climate model for Earth and rocky planet applications[J]. AIMS Geosciences, 2018, 4(4): 180-191. doi: 10.3934/geosci.2018.4.180







 DownLoad:
DownLoad: