Citation: Christoph Janiak. Inorganic materials synthesis in ionic liquids[J]. AIMS Materials Science, 2014, 1(1): 41-44. doi: 10.3934/matersci.2014.1.41

| [1] | Weingärtner H, (2010) Understanding ionic liquids at the molecular level: Facts, problems, and controversies. Angew Chem Int Ed 47: 654-670. |
| [2] | Welton T, (1999) Room-temperature ionic liquids. Solvents for synthesis and catalysis. Chem Rev 99: 2071-2084. |
| [3] | Taubert A, Li Z, (2007) Inorganic materials from ionic liquids. Dalton Trans 723-727. |
| [4] |
Wasserscheid P, Keim W, (2000) Ionic liquids-new "solutions" for transition metal catalysis. Angew. Chem. Int. Ed. 39: 3772-3789. doi: 10.1002/1521-3773(20001103)39:21<3772::AID-ANIE3772>3.0.CO;2-5

|
| [5] |
Pârvulescu VI, Hardacre C, (2007) Catalysis in ionic liquids. Chem Rev 107: 2615-2665. doi: 10.1021/cr050948h
|
| [6] |
Lodge P, (2008) A unique platform for materials design. Science 321: 50-51. doi: 10.1126/science.1159652
|
| [7] |
Plechkova NV, Seddon KR, (2008) Applications of ionic liquids in the chemical industry. Chem Soc Rev 37: 123-150. doi: 10.1039/B006677J
|
| [8] |
Torimoto T, Tsuda T, Okazaki K et al. (2010) New frontiers in materials science opened by ionic liquids. Adv Mater 22: 1196-1221. doi: 10.1002/adma.200902184
|
| [9] |
Hallett JP, Welton T, (2011) Room-temperature ionic liquids: Solvents for synthesis and catalysis. 2. Chem Rev 111: 3508-3576. doi: 10.1021/cr1003248
|
| [10] |
Ahmed E, Breternitz J, Groh MF, et al. (2012) Ionic liquids as crystallization media for inorganic materials. CrystEng Comm 14: 4874-4885. doi: 10.1039/c2ce25166c
|
| [11] |
Carriazo D, Concepción Serrano M, Concepción Gutiérrez M et al. (2012) Deep-eutectic solvents playing multiple roles in the synthesis of polymers and related materials. Chem Soc Rev 41:4996-5014. doi: 10.1039/c2cs15353j
|
| [12] |
Scholten JD, Leal BC, Dupont J, (2012) Transition metal nanoparticle catalysis in ionic liquids. ACS Catalysis 2: 184-200. doi: 10.1021/cs200525e
|
| [13] |
Feldmann C, (2013) Ionic liquids in chemical synthesis-progress and advantages as compared to conventional solvents. Z Naturforsch 68b: 1057-1057. doi: 10.5560/ZNB.2013-3204
|
| [14] | Groh MF, Müller U, Ahmed E, et al. (2013) Substitution of conventional high-temperature syntheses of inorganic compounds by near-room-temperature syntheses in ionic liquids. Z Naturforsch 68b: 1108-1122. |
| [15] | Morris RE, (2009) Ionothermal synthesis-ionic liquids as functional solvents in the preparation of crystalline materials. Chem Commun 2990-2998. |
| [16] | Morris RE, (2010) Ionothermal synthesis of zeolites and other porous materials, In: Cejka J, Corma A, Zones S Editors, From Zeolites and Catalysis, Vol. 1, Weinheim: Wiley-VCH, 87-105. |
| [17] |
Parnham ER, Morris RE, (2007) Ionothermal synthesis of zeolites, metal-organic frameworks and inorganic-organic hybrids. Acc Chem Res 40: 1005-1013. doi: 10.1021/ar700025k
|
| [18] |
Guloy AM, Ramlau R, Tang Z, et al. (2006) A guest-free germanium clathrate. Nature 443:320-323. doi: 10.1038/nature05145
|
| [19] | Janiak C, (2013) Ionic liquids for the synthesis and stabilization of metal nanoparticles. Z Naturforsch 68b, 1059-1089. |
| [20] |
Zou H, Luan Y, Ge J, et al. (2011) Synthesis of ZnO particles on zinc foil in ionic-liquid precursors. CrystEngComm 13: 2656-2660 doi: 10.1039/c0ce00788a
|
| [21] | Taubert A, Stange F, Li Z, et al. (2012) CuO nanoparticles from the strongly hydrated ionic liquid precursor (ILP) tetrabutylammonium hydroxide. ACS Appl Mater Interfaces 2012, 4, 791-795. |
| [22] | Alammar T, Birkner A, Mudring A-V, (2009) Ultrasound-assisted synthesis of CuO nanorods in a neat room-temperature ionic liquid. Eur J Inorg Chem 2765-2768. |
| [23] |
Rodríguez-Cabo B, Rodil E, Rodríguez H, et al. (2012) Direct preparation of sulfide semiconductor nanoparticles from the corresponding bulk powders in an ionic liquid. Angew Chem Int Ed 51: 1424-1427. doi: 10.1002/anie.201106546
|
| [24] |
Lin Y, Dehnen S, (2011) [BMIm]4[Sn9Se20]: Ionothermal synthesis of a selenidostannate with a 3D open-framework structure. Inorg Chem 50: 7913-7915. doi: 10.1021/ic200697k
|
| [25] |
Lin Y, Massa W, Dehnen S, (2012) "Zeoball" [Sn36Ge24Se132]24-: A molecular anion with zeolite-related composition and spherical shape. J Am Chem Soc 134: 4497-4500. doi: 10.1021/ja2115635
|
| [26] |
Ahmed E, Ruck M, (2011) Chemistry of polynuclear transition-metal complexes in ionic liquids. Dalton Trans 40: 9347-9357. doi: 10.1039/c1dt10829h
|
| [27] |
Xiong W-W, Li J-R, Hu B, et al. (2012) Largest discrete supertetrahedral clusters synthesized in ionic liquids. Chem Sci 3: 1200-1204. doi: 10.1039/c2sc00824f
|
| [28] |
Cai M, Thorpe D, Adamson DH, et al. (2012) Methods of graphite exfoliation. J Mater Chem 22:24992-25002. doi: 10.1039/c2jm34517j
|
| [29] |
Dupont J, Scholten JD, (2010) On the structural and surface properties of transition-metal nanoparticles in ionic liquids. Chem Soc Rev 39: 1780-1804. doi: 10.1039/b822551f
|
| [30] |
Vollmer C, Janiak C, (2011) Naked metal nanoparticles from metal carbonyls in ionic liquids: Easy synthesis and stabilization. Coord Chem Rev 255: 2039-2057. doi: 10.1016/j.ccr.2011.03.005
|
| [31] |
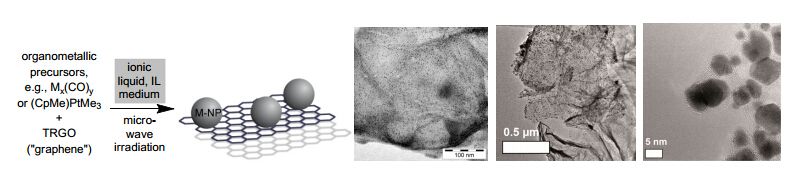
Marquardt D, Vollmer C, Thomann R, et al. (2011) The use of microwave irradiation for the easy synthesis of graphene-supported transition metal hybrid nanoparticles in ionic liquids. Carbon 49: 1326-1332. doi: 10.1016/j.carbon.2010.09.066
|
| [32] |
Marquardt D, Beckert F, Pennetreau F, et al. (2014) Hybrid materials of platinum nanoparticles and thiol-functionalized graphene derivatives. Carbon 66: 285-294. doi: 10.1016/j.carbon.2013.09.002
|
| [33] |
Mingos DMP, Baghurst DR, (1991) Applications of microwave dielectric heating effects to synthetic problems in chemistry. Chem Soc Rev 20: 1-47. doi: 10.1039/cs9912000001
|
| [34] |
Galema SA, (1997) Microwave chemistry. Chem Soc Rev 26: 233-238. doi: 10.1039/cs9972600233
|
| [35] |
Larhed M, Moberg C, Hallberg A, (2002) Microwave-accelerated homogeneous catalysis in organic chemistry. Acc Chem Res 35: 717-727. doi: 10.1021/ar010074v
|
| [36] |
Bilecka I, Niederberger M, (2010) Microwave chemistry for inorganic nanomaterials synthesis. Nanoscale 2: 1358-1374. doi: 10.1039/b9nr00377k
|
| [37] |
Leonelli C, Mason, TJ, (2010) Microwave and ultrasonic processing: Now a realistic option for industry. Chem. Engineering and Processing 49: 885-900. doi: 10.1016/j.cep.2010.05.006
|
Figures(2)

Christoph Janiak. Inorganic materials synthesis in ionic liquids[J]. AIMS Materials Science, 2014, 1(1): 41-44. doi: 10.3934/matersci.2014.1.41







 DownLoad:
DownLoad: