In [Andreianov, Coclite, Donadello, Discrete Contin. Dyn. Syst. A, 2017], a finite volume scheme was introduced for computing vanishing viscosity solutions on a single-junction network, and convergence to the vanishing viscosity solution was proven. This problem models $ m $ incoming and $ n $ outgoing roads that meet at a single junction. On each road the vehicle density evolves according to a scalar conservation law, and the requirements for joining the solutions at the junction are defined via the so-called vanishing viscosity germ. The algorithm mentioned above processes the junction in an implicit manner. We propose an explicit version of the algorithm. It differs only in the way that the junction is processed. We prove that the approximations converge to the unique entropy solution of the associated Cauchy problem.
Citation: John D. Towers. An explicit finite volume algorithm for vanishing viscosity solutions on a network[J]. Networks and Heterogeneous Media, 2022, 17(1): 1-13. doi: 10.3934/nhm.2021021
In [Andreianov, Coclite, Donadello, Discrete Contin. Dyn. Syst. A, 2017], a finite volume scheme was introduced for computing vanishing viscosity solutions on a single-junction network, and convergence to the vanishing viscosity solution was proven. This problem models $ m $ incoming and $ n $ outgoing roads that meet at a single junction. On each road the vehicle density evolves according to a scalar conservation law, and the requirements for joining the solutions at the junction are defined via the so-called vanishing viscosity germ. The algorithm mentioned above processes the junction in an implicit manner. We propose an explicit version of the algorithm. It differs only in the way that the junction is processed. We prove that the approximations converge to the unique entropy solution of the associated Cauchy problem.

| [1] |
On interface transmission conditions for conservation laws with discontinuous flux of general shape. J. Hyberbolic Differ. Equ. (2015) 12: 343-384. 
|
| [2] |
Well-posedness for vanishing viscosity solutions of scalar conservation laws on a network. Discrete Contin. Dyn. Syst. - A (2017) 37: 5913-5942.
|
| [3] |
A theory of L1-dissipative solvers for scalar conservation laws with discontinuous flux. Arch. Ration. Mech. Anal. (2011) 201: 27-86.
|
| [4] |
Flows on networks: Recent results and perspectives. EMS Surv. Math. Sci. (2014) 1: 47-111.
|
| [5] |
Numerical approximations of a traffic flow model on networks. Netw. Heterog. Media (2006) 1: 57-84.
|
| [6] |
Vanishing viscosity on a star-shaped graph under general transmission conditions at the node. Netw. Heterog. Media (2020) 15: 197-213.
|
| [7] |
Vanishing viscosity for traffic flow on networks. SIAM J. Math. Anal. (2010) 42: 1761-1783.
|
| [8] |
Traffic flow on a road network. SIAM J. Math. Anal. (2005) 36: 1862-1886.
|
| [9] |
Monotone difference approximations for scalar conservation laws. Math. Comp. (1980) 34: 1-21.
|
| [10] |
On scalar conservation laws with point source and discontinuous flux function. SIAM J. Math. Anal. (1995) 26: 1425-1451.
|
| [11] |
U. S. Fjordholm, M. Musch and N. H. Risebro, Well-posedness theory for nonlinear scalar conservation laws on networks, preprint, https://arXiv.org/pdf/2102.06400.pdf. |
| [12] |
Conservation laws on complex networks. Ann. Inst. H. Poincaré Anal. Non Linéare (2009) 26: 1925-1951.
|
| [13] |
Speed limit and ramp meter control for traffic flow networks. Eng. Optim. (2016) 48: 1121-1144.
|
| [14] |
Comparative study of macroscopic traffic flow models at road junctions. Netw. Heterog. Media (2020) 15: 216-279.
|
| [15] |
Phenomenological model for dynamic traffic flow in networks. Transp. Res. B (1995) 29: 407-431.
|
| [16] |
A mathematical model of traffic flow on a network of unidirectional roads. SIAM J. Math. Anal. (1995) 26: 999-1017.
|
| [17] |
Convergence of a Godunov scheme for for conservation laws with a discontinuous flux lacking the crossing condition. J. Hyperbolic Differ. Equ. (2017) 14: 671-701.
|
| [18] |
J. Lebacque, The Godunov scheme and what it means for first order traffic flow models, in Proceedings of the 13th International Symposium of Transportation and Traffic Theory (ed. J. Lesort), Elsevier, (1996), 647–677. |
| [19] |
First order macroscopic traffic flow models for networks in the context of dynamic assignment. Transportation Planning and Applied Optimization (2004) 64: 119-140.
|
| [20] |
Existence of strong traces for quasi-solutions of multidimensional scalar conservation laws. J. Hyperbolic Differ. Equ. (2007) 4: 729-770.
|
| [21] |
On the implementation of a finite volumes scheme with monotone transmission conditions for scalar conservation laws on a star-shaped network. Appl. Numer. Math. (2020) 155: 181-191.
|
Figures(1)
John D. Towers. An explicit finite volume algorithm for vanishing viscosity solutions on a network[J]. Networks and Heterogeneous Media, 2022, 17(1): 1-13. doi: 10.3934/nhm.2021021

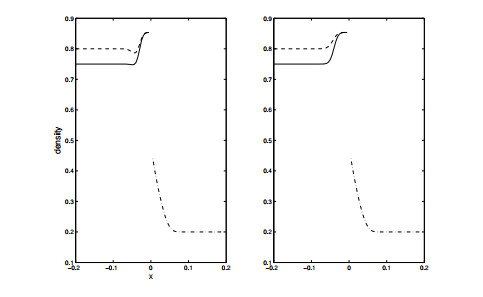
Example 1. Left panel:






 DownLoad:
DownLoad: