Citation: Todd Lael Siler. Neurotranslations: Interpreting the Human Brain’s Attention System[J]. AIMS Medical Science, 2016, 3(2): 179-202. doi: 10.3934/medsci.2016.2.179

| [1] | Alivisatos PA, Chun M, Church GM, et al. (2011) “The Brain Activity Map and Functional Connectomics” Functional Connectomics.pdf Opportunities at the Interface of Neuroscience and Nanoscience, a workshop held at Chicheley Hall, the Kavli Royal Society International Centre, UK on 10-13 September 2011; and the 6th Kavli Futures Symposium: Toward the Brain Activity Map (28-30 January 2012), Santa Monica, CA. |
| [2] | Seung S (2012) Connectome: How the Brain’s Wiring Makes Us Who We Are. Boston: Houghton Mifflin Harcourt. |
| [3] | Zhang X, Lei X, Wu T, etal. (2014). A review of EEG and MEG for brainnetome research. Cogn Neurodyn 8: 87-98. doi: 10.1007/s11571-013-9274-9. Epub 2013 Nov 22. |
| [4] | http://www.whitehouse.gov/share/brain-initiative |
| [5] | Koslow SH, Subramaniam S (2005) Databasing the Brain: From Data to Knowledge Neuroinformatics. Hoboken, NJ: John Wiley and Sons. |
| [6] | Dietrich A (2004) The cognitive neuroscience of creativity. Psychon Bull Rev 11: 1011-1026. doi: 10.3758/BF03196731 |
| [7] | Zeki S (2001) Artistic creativity and the brain. Science 293: 51-52. doi: 10.1126/science.1062331 |
| [8] | Kandel ER (2012) The Age of Insight: The Quest to Understand the Unconscious in Art, Mind and Brain, from Vienna 1900 to the Present. New York, NY: Random House. |
| [9] | Ramachandran VS, Hirstein W (1999) The science of art. J Conscious Stud 6: 15-51. |
| [10] | Ishizu T, Zeki S (2011) Toward a brain-based theory of beauty. PLoS One 6: e21852. doi: 10.1371/journal.pone.0021852 |
| [11] | Hasson U, Landesman O, Knappmeyer B, et al. (2008) Neurocinematics: The Neuroscience of Film. Berghahn J 2: 1-26. |
| [12] | Ticini LF, Urgesi C, Calvo-Merino B (2015) Embodied aesthetics: insight from cognitive neuroscience of the performing arts. Aesthet Embodied Mind Beyond Art Theory Cartesian Mind-Body Dichotomy Contributions Phenomenology 73: 103-115. doi 10.1007/978-94-017-9379-7_7 |
| [13] | Kahneman D, Slovic P, Tversky A (1982) Judgment Under Uncertainty: Heuristics and Biases. Cambridge, England: Cambridge University Press. |
| [14] | Posner MI (2008) “Measuring alertness,” in D.W. Pfaff & B.L. Kieffer (Eds.). Molecular and biophysical mechanisms of arousal, alertness, and attention [pp.193-199]. Boston: Blackwell. |
| [15] |
Posner MI, Petersen SE (1990) The Attention System of the Human Brain. Annu Rev Neurosci 13:25-42. http://cns-web.bu.edu/Profiles/Mingolla.html/cnsftp/cn730-2007-pdf/posner_petersen90.pdf doi: 10.1146/annurev.ne.13.030190.000325

|
| [16] | Posner MI (Ed.) (2012) Cognitive Neuroscience of Attention. 2nd Ed. New York, NY: The Guilford Press. |
| [17] | Floresco SB, Ghods-Sharifi S (2006) Amygdala-Prefrontal Cortical Circuitry Regulates Effort-Based Decision Making. https://cercor.oxfordjournals.org/content/17/2/251.full |
| [18] | Collins F (2012) “The Symphony Inside Your Brain” Posted on November 5, 2012http://directorsblog.nih.gov/2012/11/05/the-symphony-inside-your-brain/ |
| [19] | Seifter J, Economy P (2001) Leadership Ensemble. New York, NY: Henry Holt & Co. |
| [20] | Seifter J, Economy P (2001) Leader to Leader, No. 1, Summer. |
| [21] | De Dreu CK, Baas M, Roskes M, et al. (2014) Oxytonergic circuitry sustains and enables creative cognition in humans. Soc Cogn Affect Neurosci 9: 1159-1165. doi: 10.1093/scan/nst094 |
| [22] |
Siler T (2012) Neuro-impressions: interpreting the nature of human creativity. Front Hum Neurosci 6: 1-5. doi: 10.3389/fnhum.2012.00282 doi: 10.3389/fnhum.2012.00282
|
| [23] | Polanyi M (1958/1998) Personal Knowledge. Towards a Post Critical Philosophy. London: Routledge. |
| [24] | Polanyi M (1967) The Tacit Dimension. New York, NY: Anchor Books. |
| [25] | Siler T (1986) Architectonics of Thought: A Symbolic Model of Interdisciplinary Studies in Psychology and Art, Massachusetts Institute of Technology. Available at: https://dspace.mit.edu/handle/1721.1/17200 |
| [26] | Siler T (1993) Cerebralism: Creating A New Millennium of Minds, Bodies and Civilizations. New York, NY: Ronald Feldman Fine Arts. |
| [27] | Siler T (1981) Reality. Master’s Thesis, Master of Science in Visual Studies, Center for Advanced Visual Studies, Massachusetts Institute of Technology. |
| [28] | Siler T (1983) The Biomirror. New York, NY: Ronald Feldman Fine Arts. |
| [29] | Schacter DL (1996) Searching for Memory: The Brain, the Mind and the Past. New York, NY: Basic Books. |
| [30] | Ramachandran VS, Hirstein W (1999) The science of art. J Conscious Studies 6: 15-51. |
| [31] | Ramachandran VS (2011) The Tell-Tale Brain. New York, NY: Norton. |
| [32] | Siler T (2015) Neuroart: picturing the neuroscience of intentional actions in art and science. http://journal.frontiersin.org/article/10.3389/fnhum.2015.00410/abstract |
| [33] | Kandel ER (2012) The Age of Insight: The quest to understand the unconscious in art, mind, brain, from Vienna 1900 to the Present. New York, NY: Random House. |
| [34] | Siler T (1990) Breaking The Mind Barrier. New York, NY: Simon and Schuster, p.254. |
| [35] | Siler T (1987) The Art of Thought. Centre Saidye Bronfman, Montreal, Canada; and Ronald Feldman Fine Arts, New York, NY. |
| [36] | Bem JB (2011) “Feeling the Future: Experimental Evidence for Anomalous Retroactive Influences on Cognition and Affect.” J Personality Soc Psychology 100: 407-425. http://dx.doi.org/10.1037/a0021524 |
| [37] | Siler T (1986) Architectonics of Thought: A Symbolic Model of Interdisciplinary Studies in Psychology and Art, Massachusetts Institute of Technology. Available at: https://dspace.mit.edu/handle/1721.1/17200 |
| [38] | Morrison P, Tsipis K (1998) Reason Enough To Hope: America and the World of the 21st Century. Cambridge, MA: The MIT Press (p. 198). |
| [39] | Bishop SJ (2007) Neurocognitive mechanisms of anxiety: an integrative account. Trend Cognitive Sci. doi:10.1016/j.tics.2007.05.008 |
| [40] | Floresco SB, Ghods-Sharifi S (2006) Amygdala-Prefrontal Cortical Circuitry Regulates Effort-Based Decision Making. https://cercor.oxfordjournals.org/content/17/2/251.full |
| [41] | Aggleton JP (Ed.) (1992) The amygdala: neurobiological aspects of emotions, memory and mental dysfunction. New York: Wiley-Liss Inc. |
| [42] |
Saddoris MP, Gallagher M, Schoenbaum G (2005) Rapid associative encoding in basolateral amygdala depends on connections with orbitofrontal cortex. Neuron 46:321-331. doi: 10.1016/j.neuron.2005.02.018
|
| [43] | Bishop SJ (2007) Neurocognitive mechanisms of anxiety: an integrative account. Trend Cognitive Sci. doi:10.1016/j.tics.2007.05.008 |
| [44] | Eliasmith C, Stewart TC, Xuan Choo, et al. (2012) A Large-Scale Model of the Functioning Brain. Science 338: 1202-1205. DOI: 10.1126/science.1225266 |
| [45] | Morrison JG, Kelly RT, Moore RA, et al. (2003) Tactical Decision Making Under Stress (TADMUS) Decision Support System unclassified paper sponsored by the Office of Naval Research, Cognitive and Neural Science Technology Division. |
| [46] | Bishop SJ (2007) Neurocognitive mechanisms of anxiety: an integrative account. Trend Cognitive Sci. doi:10.1016/j.tics.2007.05.008 |
| [47] | Jackson PL, Brunet E, Meltzoff AN, et al. (2006) Empathy examined through the neural mechanisms involved in imagining how I feel versus how you feel pain. Neuropsychologia 44: 752-761. |
| [48] | Freedberg D, Gallese V (2014) Motion, emotion and empathy in esthetic experience. Trend Cognitive Sci 11: 197-203. |
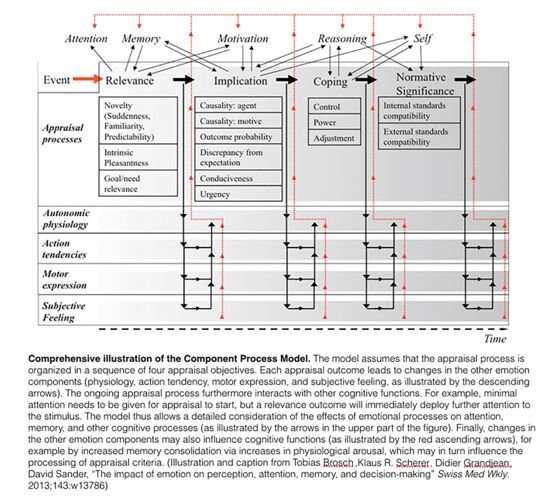
| [49] | Brosch T, Scherer KR, Grandjean D, Sander D. (2013) The impact of emotion on perception, attention, memory, and decision-making. Medical Intelligence. Swiss Med Wkly. 2013 May 14; 143: w13786. doi: 10.4414/smw.2013.13786. |
| [50] | Phelps EA (2004) Human emotion and memory: interactions of the amygdala and hippocampal complex. Current Opinion Neurobiology 14: 198-202. DOI 10.1016/j.conb.2004.03.015 |
| [51] |
Gross JJ (1998) The Emerging Field of Emotion Regulation: An Integrative Review. Rev General Psychology 2: 271-299. doi: 10.1037/1089-2680.2.3.271
|
| [52] | Hou X, Zhang L (2008) “Dynamic visual attention: searching for coding length increments. Advances Neural Information Processing Systems 21 (NIPS 2008)Neural Information Processing Systems (NIPS) |
| [53] |
Chen Q, Weidner R, Vossel S, et al. (2012) Neural Mechanisms of Attentional Reorienting in Three-Dimensional Space. J Neurosci 32: 13352-13362. doi: 10.1523/JNEUROSCI.1772-12.2012
|
| [54] | Greicius MD, Srivastava G, Reiss AL, et al. (2004) Default-mode network activity distinguishes Alzheimer’s disease from healthy aging: evidence from functional MRI. Proc Natl Acad Sci U.S.A. 101: 4637-4642. |
| [55] | Andreasen NC, O’Leary DS, Cizadlo T, et al. (1995) Remembering the past: two facets of episodic memory explored with positron emission tomography. Am J Psychiatry 152: 1576-1585. |
| [56] | Buckner RL, Andrews-Hanna JR, Schacter DL (2008) The Brain’s Default Network Anatomy, Function, and Relevance to Disease. Ann NY Acad Sci 1124: 1-38. New York Academy of Sciences. doi: 10.1196/annals.1440.011 |
| [57] | Arrien J (2015) http://www.nsf.gov/mobile/discoveries/disc_images.jspcntn_id=136954&org=NSF |
| [58] | Contreras-Vidal J, Prasad S, Roysam B (2015) NCS-FO: Assaying neural individuality and variation in freely behaving people based on qEEG. NSF-Award Abstract #1533691 |
| [59] | Bruya B (2010) Effortless Attention: A New Perspective in the Cognitive Science of Attention and Action. Cambridge, MA: Bradford Books. |
| [60] | Siler T (2015) Neuroart: picturing the neuroscience of intentional actions in art and science. http://journal.frontiersin.org/article/10.3389/fnhum.2015.00410/abstract |
| [61] |
Cohen D (1972) Magnetoencephalography: detection of the brain's electrical activity with a superconducting magnetometer. Science 175: 664-666. doi: 10.1126/science.175.4022.664
|
| [62] | Encyclopedia of the Neurological Sciences (p. 293). |
| [63] | Kreiman G, Rutishauser U, Cerf M, et al. (2014) The next ten years and beyond. In single neuron studies of the human brain. In Probing Cognition, eds I. Fried U, Rutishauser M, Cerf G Kreiman (Cambridge, MA: The MIT Press), 347-358. |
| [64] | Floresco SB, Ghods-Sharifi S (2006) Amygdala-Prefrontal Cortical Circuitry Regulates Effort-Based Decision Making. https://cercor.oxfordjournals.org/content/17/2/251.full |
| [65] | Hickok G, Poeppel D (2000) Towards a functional neuroanatomy of speech perception. Trend Cognitive Sci 4: 131-138. DOI: 10.1016/S1364-6613(00)01463-7 |
| [66] | Hickok G, Poeppel D (2004) Dorsal and ventral streams: a framework for understanding aspects of the functional anatomy of language. Cognition 92: 67-99 DOI: 10.1016/j.cognition.2003.10.011 |
| [67] | Hickok G, Poeppel D (2007) The cortical organization of speech processing. Nat Rev Neurosci 8: 393-402. DOI: 10.1038/nrn2113 |
| [68] | Lehrer J (2011) The Science of Irrationality. A Nobelist explains our fondness for not thinking. The Wall Street J. October 15-16; C18. |
| [69] | Siler T (2015) Neuroart: picturing the neuroscience of intentional actions in art and science. http://journal.frontiersin.org/article/10.3389/fnhum.2015.00410/abstract |
| [70] | Siler T (1997) Think Like A Genius: Use Your Creativity in Ways That Will Enrich Your Life. New York: Bantam Books. |
| [71] | Siler T (2011) The ArtScience Program for Realizing Human Potential. Leonardo 44, 417-424. doi: 10.1162/leon_a_00242 |
| [72] |
Root-Bernstein B, Siler T, Brown A, et al. (2011) ArtScience: integrative collaboration to create a sustainable future. Leonardo 44: 192. doi: 10.1162/leon_e_00161 doi: 10.1162/LEON_e_00161
|
| [73] | Adolphs R (2015) The unsolved problems of neuroscience. Trend Cognitive Sci. PMID: 25703689 |
| [74] |
Adee S (2008) Reverse engineering the brain. IEEE Spectrum 45: 51-55. doi: 10.1109/MSPEC.2008.4531462
|


Figures(12)

Todd Lael Siler. Neurotranslations: Interpreting the Human Brain’s Attention System[J]. AIMS Medical Science, 2016, 3(2): 179-202. doi: 10.3934/medsci.2016.2.179







 DownLoad:
DownLoad: