The degradation of permafrost poses severe environmental threats to communities in cold regions. As near-surface permafrost warms, extensive topographic variability is prevalent in the Arctic and Sub-Arctic communities. Geologic hazards such as thermokarst are formed due to varying rates of permafrost degradation, resulting in ground subsidence. This gradual subsidence or abrupt collapse of the earth causes a danger to existing infrastructure and the economic activities of communities in cold regions. Understanding the causes of thermokarst development and its dynamics requires imaging its underground morpho-structures and characterizing the surface and subsurface controls. In this study, we conducted a two-dimensional (2D) electrical resistivity tomography (ERT) survey to characterize the permafrost conditions in a thermokarst prone site located in Fairbanks, Alaska. To increase the reliability in the interpretability of the ERT data, borehole data and the depth-of-investigation (DOI) methods were applied. By using the 2D and three-dimensional (3D) ERT methods, we gained valuable information on the spatial variability of transient processes, such as the movement of freezing and thawing fronts. Resistivity imaging across the site exhibited distinct variations in permafrost conditions, with both low and high resistive anomalies observed along the transects. These anomalies, representing taliks and ice wedges, were characterized by resistivity values ranging from 50 Ωm and above 700 Ωm, respectively. The results from this study showed the effectiveness of ERT to characterize permafrost conditions and thermokarst subsurface morpho-structures. The insights gained from this research contribute to a better understanding of the causes and dynamics of thermokarst, which can be instrumental for engineers in developing feasible remedial measures.
Citation: Abdallah Basiru, Shishay T Kidanu, Sergei Rybakov, Nicholas Hasson, Moustapha Kebe, Emmanuel Osei Acheampong. Electrical Resistivity Tomography Investigation of Permafrost Conditions in a Thermokarst Site in Fairbanks, Alaska[J]. AIMS Geosciences, 2024, 10(1): 1-27. doi: 10.3934/geosci.2024001
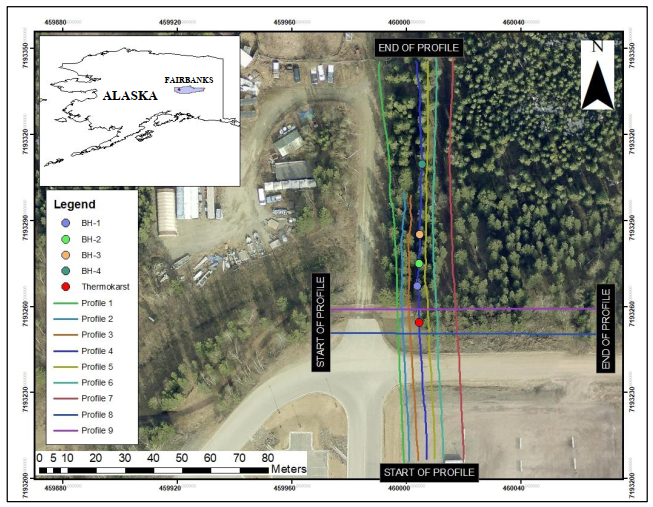
The degradation of permafrost poses severe environmental threats to communities in cold regions. As near-surface permafrost warms, extensive topographic variability is prevalent in the Arctic and Sub-Arctic communities. Geologic hazards such as thermokarst are formed due to varying rates of permafrost degradation, resulting in ground subsidence. This gradual subsidence or abrupt collapse of the earth causes a danger to existing infrastructure and the economic activities of communities in cold regions. Understanding the causes of thermokarst development and its dynamics requires imaging its underground morpho-structures and characterizing the surface and subsurface controls. In this study, we conducted a two-dimensional (2D) electrical resistivity tomography (ERT) survey to characterize the permafrost conditions in a thermokarst prone site located in Fairbanks, Alaska. To increase the reliability in the interpretability of the ERT data, borehole data and the depth-of-investigation (DOI) methods were applied. By using the 2D and three-dimensional (3D) ERT methods, we gained valuable information on the spatial variability of transient processes, such as the movement of freezing and thawing fronts. Resistivity imaging across the site exhibited distinct variations in permafrost conditions, with both low and high resistive anomalies observed along the transects. These anomalies, representing taliks and ice wedges, were characterized by resistivity values ranging from 50 Ωm and above 700 Ωm, respectively. The results from this study showed the effectiveness of ERT to characterize permafrost conditions and thermokarst subsurface morpho-structures. The insights gained from this research contribute to a better understanding of the causes and dynamics of thermokarst, which can be instrumental for engineers in developing feasible remedial measures.

| [1] | Jorgenson MT (2013) Thermokarst Terrains, In: Shroder J, Giardino R, and Harbor J, Eds., Treatise on Geomorphology, San Diego, Academic Press, 313–324. https://doi.org/10.1016/B978-0-12-374739-6.00215-3 |
| [2] |
Harris C, Arenson LU, Christiansen HH, et al. (2009) Permafrost and climate in Europe: Monitoring and modelling thermal, geomorphological and geotechnical responses. Earth Sci Rev 92: 117–171. https://doi.org/10.1016/j.earscirev.2008.12.002 doi: 10.1016/j.earscirev.2008.12.002

|
| [3] |
Jorgenson MT, Romanovsky V, Harden J, et al. (2010) Resilience and vulnerability of Permafrost to climate change. Can J For Res 40: 1219–1236. https://doi.org/10.1139/X10-060 doi: 10.1139/X10-060
|
| [4] |
Osterkamp TE, Romanovsky VE (1999) Evidence for warming and thawing of discontinuous permafrost in Alaska. Permafrost Periglac 10: 17–37. https://doi.org/10.1002/(SICI)1099-1530(199901/03)10:1<17:AID-PPP303>3.0.CO;2-4 doi: 10.1002/(SICI)1099-1530(199901/03)10:1<17:AID-PPP303>3.0.CO;2-4
|
| [5] |
Romanovsky VE, Smith SL, Christiansen HH (2010) Permafrost thermal state in the polar northern hemisphere during the international polar year 2007–2009: A synthesis. Permafrost Periglac 21: 106–116. https://doi.org/10.1002/ppp.689 doi: 10.1002/ppp.689
|
| [6] |
Romanovsky VE, Osterkamp TE (2000) Effects of unfrozen water on heat and mass transport processes in the active layer and permafrost. Permafrost Periglac 11: 219–239. https://doi.org/10.1002/1099-1530(200007/09)11:3<219:AID-PPP352>3.0.CO;2-7 doi: 10.1002/1099-1530(200007/09)11:3<219:AID-PPP352>3.0.CO;2-7
|
| [7] |
Shur YL, Jorgenson MT (2007) Patterns of permafrost formation and degradation in relation to climate and ecosystems. Permafrost Periglac 18: 7–19. https://doi.org/10.1002/ppp.582 doi: 10.1002/ppp.582
|
| [8] |
Osterkamp TE, Jorgenson MT, Schuur EAG, et al. (2009) Physical and ecological changes associated with warming permafrost and thermokarst in Interior Alaska. Permafrost Periglac 20: 235–256. https://doi.org/10.1002/ppp.656 doi: 10.1002/ppp.656
|
| [9] | Olenchenko VV, Gagarin LA, Khristoforov II, et al. (2017) The structure of a site with thermo-suffosion processes within bestyakh terrace of the lena river, according to geophysical data. Kriosfera Zemli 21: 16–26. |
| [10] |
Briggs MA, Campbell S, Nolan J, et al. (2017) Surface Geophysical Methods for Characterising Frozen Ground in Transitional Permafrost Landscapes. Permafrost Periglac 28: 52–65. https://doi.org/10.1002/ppp.1893 doi: 10.1002/ppp.1893
|
| [11] |
Shiklomanov NI, Nelson FE (1999) Analytic representation of the active layer thickness field, Kuparuk River Basin, Alaska. Ecol Modell 123: 105–125. https://doi.org/10.1016/S0304-3800(99)00127-1 doi: 10.1016/S0304-3800(99)00127-1
|
| [12] |
Shur Y, Hinkel KM, Nelson FE (2005) The transient layer: Implications for geocryology and climate-change science. Permafrost Periglac 16: 5–17. https://doi.org/10.1002/ppp.518 doi: 10.1002/ppp.518
|
| [13] |
Kneisel C, Hauck C, Fortier R, et al. (2008) Advances in geophysical methods for permafrost investigations. Permafrost Periglac 19: 157–178. https://doi.org/10.1002/ppp.616 doi: 10.1002/ppp.616
|
| [14] |
Conaway CH, Johnson CD, Lorenson TD, et al. (2020) Permafrost Mapping with Electrical Resistivity Tomography: A Case Study in Two Wetland Systems in Interior Alaska. J Environ Eng Geophys 25: 199–209. https://doi.org/10.2113/JEEG19-091 doi: 10.2113/JEEG19-091
|
| [15] | Douglas TA, Jorgenson MT, Kanevskiy MZ, et al. (2008) Permafrost Dynamics at the Fairbanks Permafrost Experimental Station Near Fairbanks, Alaska. University of Alaska, Fairbanks, 373–377. |
| [16] |
Fortier R, LeBlanc AM, Allard M, et al. (2008) Internal structure and conditions of permafrost mounds at Umiujaq in Nunawik, Canada, inferred from field investigation and electrical resistivity tomography. Can J Earth Sci 45: 367–387. https://doi.org/10.1139/E08-004 doi: 10.1139/E08-004
|
| [17] |
Swarzenski PW, Johnson CD, Lorenson TD, et al. (2016) Seasonal Electrical Resistivity Surveys of a Coastal Bluff, Barter Island, North Slope Alaska. J Environ Eng Geophys 21: 37–42. https://doi.org/10.2113/JEEG21.1.37 doi: 10.2113/JEEG21.1.37
|
| [18] |
Voytek EB, Rushlow CR, Godsey SE, et al. (2016) Identifying hydrologic flowpaths on arctic hillslopes using electrical resistivity and self potential. Geophysics 81: WA225–WA232. https://doi.org/10.1190/GEO2015-0172.1 doi: 10.1190/GEO2015-0172.1
|
| [19] | Parshley L (2022) Climate and Science. As permafrost thaws, the ground beneath Alaska is collapsing. Available from: https://grist.org/science/alaska-permafrost-thawing-ice-climate-change/. |
| [20] | Péwé TL (1975) Quaternary Geology of Alaska, Washington DC: US Government Printing Office. |
| [21] | Péwé TL (1954) Effect of Permafrost on Cultivated Fields, Fairbanks Area, Alaska, US Government Printing Office, 315–351. |
| [22] | Prindle LM, Smith PS, Katz FJ (1913) A Geologic Reconnaissance of The Fairbanks Quadrangle, Alaska Detailed Description of the Fairbanks District Account of Lode Mining Near Fairbanks, Washington: Government Printing Office. |
| [23] | Kanevskiy, M, Ping, C, Shur, Y, et al. (2011). Permafrost of Northern Alaska. The Proceedings of the Twenty-First (2011). Int Offshore Polar Eng Conf, 1179–1186. |
| [24] | Alaska Department of Natural Resources. "DNR Well Log—WELTS, " Well Logs at UAF. Available from: https://dnr.alaska.gov/welts. |
| [25] |
Douglas TA, Jorgenson MT, Brown DRN, et al. (2016) Degrading permafrost mapped with electrical resistivity tomography, airborne imagery and LiDAR, and seasonal thaw measurements. Geophysics 81: WA71–WA85. https://doi.org/10.1190/geo2015-0149.1 doi: 10.1190/geo2015-0149.1
|
| [26] | Jorgenson MT, Racine CH, Walters JC, et al. (2001) Permafrost Degradation and Ecological Changes Associated with a Warming Climate in Central Alaska. Clim Change 48: 551–579. |
| [27] | Frolov AD, Zykov DY, Snegirev AM, et al. (1998) Principal problems, progress, and directions of Geophysical investigations in permafrost regions. 7th International Conference on Permafrost. Université Laval, Canada, 305–311. |
| [28] |
Asare A, Appiah-Adjei EK, Owusu-Nimo F, et al. (2022) Lateral and vertical mapping of salinity along the coast of Ghana using Electrical Resistivity Tomography: The case of Central Region. Results Geophys Sci 12: 100048. https://doi.org/10.1016/j.ringps.2022.100048 doi: 10.1016/j.ringps.2022.100048
|
| [29] |
Pazzi V, Morelli S, Fanti R (2019) A Review of the Advantages and Limitations of Geophysical Investigations in Landslide Studies. Int J Geophys 2019: 1–27. https://doi.org/10.1155/2019/2983087 doi: 10.1155/2019/2983087
|
| [30] |
Hoekstra P, Sellmann PV, Delaney A (1975) Ground and Airborne Resistivity Surveys of Permafrost Near Fairbanks, Alaska. Geophysics 40: 641–656. https://doi.org/10.1190/1.1440555 doi: 10.1190/1.1440555
|
| [31] | Hauck C, Kneisel C (2008) Applied geophysics in periglacial environments. Cambridge: Cambridge University Press. |
| [32] |
Fortier R, Allard M, Seguin MK (1994) Effect of physical properties of frozen ground on electrical resistivity logging. Cold Reg Sci Technol 22: 361–384. https://doi.org/10.1016/0165-232X(94)90021-3 doi: 10.1016/0165-232X(94)90021-3
|
| [33] |
Mathys T, Hilbich C, Arenson LU, et al. (2022) Towards accurate quantification of ice content in permafrost of the Central Andes—Part 2: An upscaling strategy of geophysical measurements to the catchment scale at two study sites. Cryosphere 16: 2595–2615. https://doi.org/10.5194/tc-16-2595-2022 doi: 10.5194/tc-16-2595-2022
|
| [34] | Loke MH (2000) Electrical imaging surveys for environmental and engineering studies. A practical guide to 2. Available from: https://www.abem.se. |
| [35] |
Gharibi M, Bentley LR (2005) Resolution of 3-D electrical resistivity images from inversions of 2-D orthogonal lines. J Environ Eng Geophys 10: 339–349. https://doi.org/10.2113/JEEG10.4.339 doi: 10.2113/JEEG10.4.339
|
| [36] |
Kidanu S, Varnavina A, Anderson N, et al. (2020) Pseudo-3D-electrical resistivity tomography imaging of subsurface structure of a sinkhole—A case study in Greene County, Missouri. AIMS Geosci 6: 54–70. https://doi.org/10.3934/geosci.2020005 doi: 10.3934/geosci.2020005
|
| [37] | Golden Software (2019) Surfer ® Powerful contouring, gridding & surface mapping system Full User's Guide. Colorado. Available from: https://www.GoldenSoftware.com. |
| [38] |
Loke MH, Chambers JE, Rucker DF, et al. (2013) Recent developments in the direct-current geoelectrical imaging method. J Appl Geophys 95: 135–156. https://doi.org/10.1016/j.jappgeo.2013.02.017 doi: 10.1016/j.jappgeo.2013.02.017
|
| [39] |
Degroot-Hedlin C, Constable S (1990) Occam' s inversion to generate smooth, two-dimensional models from magnetotelluric data. Geophysics 55: 1613–1624. https://doi.org/10.1190/1.1442813 doi: 10.1190/1.1442813
|
| [40] |
Loke MH, Barker RD (1996) Rapid least-squares inversion of apparent resistivity pseudosections by a quasi-Newton methodl. Geophys Prospect 44: 131–152. https://doi.org/10.1111/j.1365-2478.1996.tb00142.x doi: 10.1111/j.1365-2478.1996.tb00142.x
|
| [41] | Loke MH (2004) Tutorial: 2-D and 3-D electrical imaging surveys. Available from: https://www.geotomosoft.com. |
| [42] |
Hauck C, Mühll DV (2003) Inversion and interpretation of two-dimensional geoelectrical measurements for detecting permafrost in mountainous regions. Permafrost Periglac 14: 305–318. https://doi.org/10.1002/ppp.462 doi: 10.1002/ppp.462
|
| [43] | Loke MH (2021) Tutorial: 2-D and 3-D electrical imaging surveys. Geotomo Software, 1–232. Available from: https://www.geotomosoft.com. |
| [44] |
Oldenburg DW, Li Y (1999) Estimating depth of investigation in dc resistivity and IP surveys. Geophysics 64: 403–41. https://doi.org/10.1190/1.1444545 doi: 10.1190/1.1444545
|
| [45] |
Roy A, Apparao A (1971) Depth of Investigation in Direct Current Methods. Geophysics 36: 943–959. https://doi.org/10.1190/1.1440226 doi: 10.1190/1.1440226
|
| [46] |
Edwards LS (1977) A Modified Pseudosection for Resistivity and IP. Geophysics 42: 1020–1036. https://doi.org/10.1190/1.1440762 doi: 10.1190/1.1440762
|
| [47] |
Szalai S, Novák A, Szarka L (2009) Depth of investigation and vertical resolution of surface geoelectric arrays. J Environ Eng Geophys 14: 15–23. https://doi.org/10.2113/JEEG14.1.15 doi: 10.2113/JEEG14.1.15
|
| [48] |
Marescot L, Loke MH, Chapellier D, et al. (2003) Assessing reliability of 2D resistivity imaging in mountain permafrost studies using the depth of investigation index method. Near Surf Geophys 1: 57–67. https://doi.org/10.3997/1873-0604.2002007 doi: 10.3997/1873-0604.2002007
|
| [49] |
Hilbich C, Fuss C, Hauck C (2011) Automated time-lapse ERT for improved process analysis and monitoring of frozen ground. Permafrost Periglac 22: 306–319. https://doi.org/10.1002/ppp.732 doi: 10.1002/ppp.732
|
| [50] |
Loke MH, Dahlin T (2002) A comparison of the Gauss-Newton and quasi-Newton methods in resistivity imaging inversion. J Appl Geophys 49: 149–162. https://doi.org/10.1016/S0926-9851(01)00106-9 doi: 10.1016/S0926-9851(01)00106-9
|
| [51] |
Liljedahl AK, Boike J, Daanen R, et al. (2016) Pan-Arctic ice-wedge degradation in warming permafrost and its influence on tundra hydrology. Nature Geosci 9: 312–318. https://doi.org/10.1038/ngeo2674 doi: 10.1038/ngeo2674
|
| [52] |
Farquharson L, Anthony KW, Bigelow N, et al. (2016) Facies analysis of yedoma thermokarst lakes on the northern Seward Peninsula, Alaska. Sediment Geol 340: 25–37. https://doi.org/10.1016/j.sedgeo.2016.01.002 doi: 10.1016/j.sedgeo.2016.01.002
|
| [53] |
Douglas TA, Jones MC, Heimstra AC (2014) Sources and Sinks of Carbon in Boreal Ecosystems of Interior Alaska: A review. Elementa 2: 000032. https://doi.org/10.12952/journal.elementa.000032 doi: 10.12952/journal.elementa.000032
|













Figures(14) / Tables(3)

Abdallah Basiru, Shishay T Kidanu, Sergei Rybakov, Nicholas Hasson, Moustapha Kebe, Emmanuel Osei Acheampong. Electrical Resistivity Tomography Investigation of Permafrost Conditions in a Thermokarst Site in Fairbanks, Alaska[J]. AIMS Geosciences, 2024, 10(1): 1-27. doi: 10.3934/geosci.2024001







 DownLoad:
DownLoad: