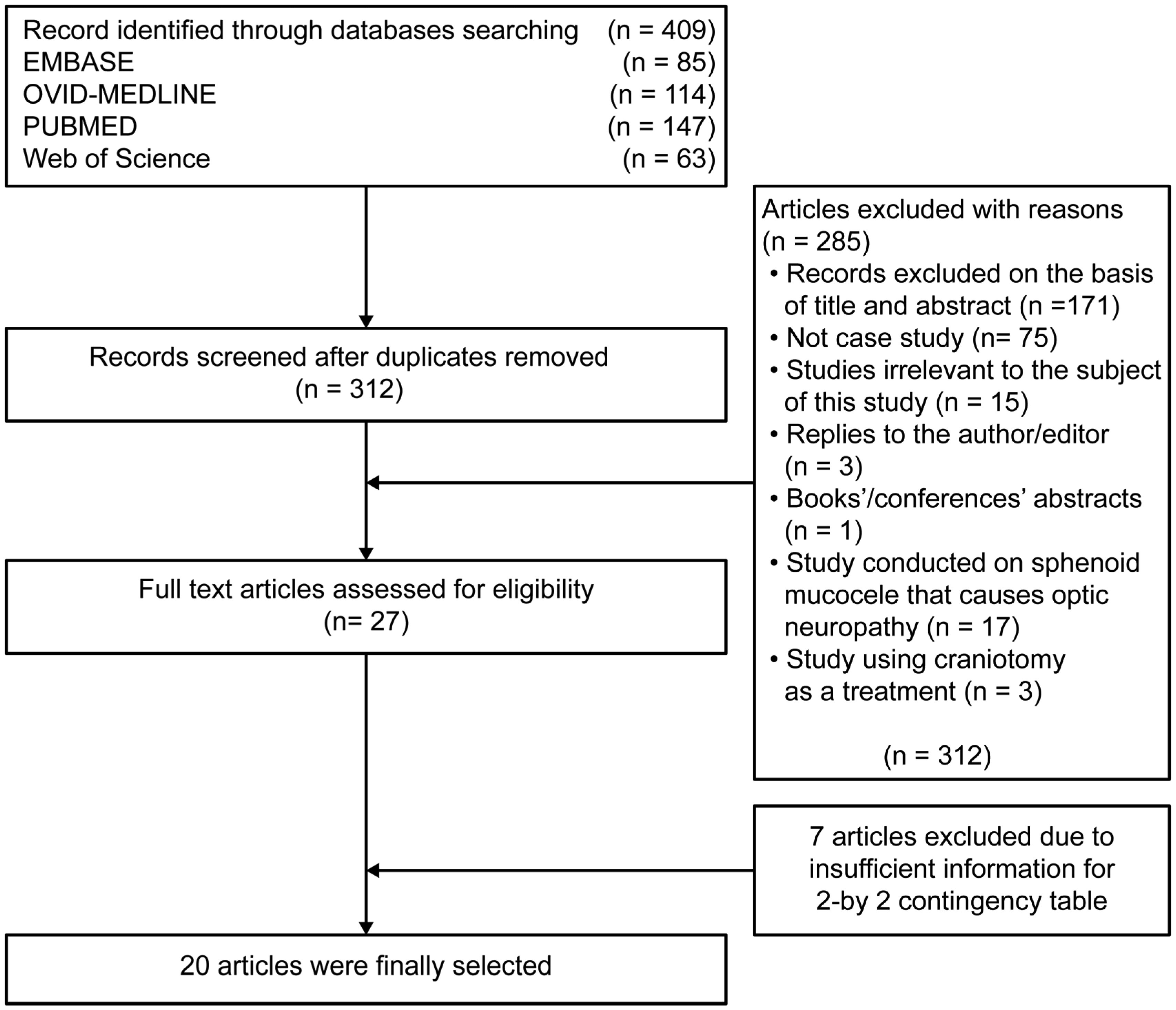
Figure 1.
Flow cart (PRISMA) for choosing the studies eligible for this review.





The modular intelligent robot platform has important application prospects in the field of tourism management services. Based on the intelligent robot in the scenic area, this paper constructs a partial differential analysis system for tourism management services, and adopts the modular design method to complete the hardware design of the intelligent robot system. Through system analysis, the whole system is divided into 5 major modules, including core control module, power supply module, motor control module, sensor measurement module, wireless sensor network module, to solve the problem of quantification of tourism management services. In the simulation process, the hardware development of wireless sensor network node is carried out based on MSP430F169 microcontroller and CC2420 radio frequency wireless communication chip, and the corresponding physical layer and MAC (Media Access Control) layer data definition and data definition of IEEE802.15.4 protocol are completed for software implementation, and data transmission and networking verification. The experimental results show that the encoder resolution is 1024P/R, the power supply voltage is DC5V5%, and the maximum response frequency is 100 kHz. The algorithm designed by MATLAB software can avoid the existing shortcomings and meet the real-time requirements of the system, which significantly improves the sensitivity and robustness of the intelligent robot.
Citation: Tingting Yang, Yi He. Design of intelligent robots for tourism management service based on green computing[J]. Mathematical Biosciences and Engineering, 2023, 20(3): 4798-4815. doi: 10.3934/mbe.2023222
| [1] | Herbert F. Jelinek, Andrei V. Kelarev . A Survey of Data Mining Methods for Automated Diagnosis of Cardiac Autonomic Neuropathy Progression. AIMS Medical Science, 2016, 3(2): 217-233. doi: 10.3934/medsci.2016.2.217 |
| [2] | Anuj A. Shukla, Shreya Podder, Sana R. Chaudry, Bryan S. Benn, Jonathan S. Kurman . Non-small cell lung cancer: epidemiology, screening, diagnosis, and treatment. AIMS Medical Science, 2022, 9(2): 348-361. doi: 10.3934/medsci.2022016 |
| [3] | Herbert F. Jelinek, Jemal H. Abawajy, Andrei V. Kelarev, Morshed U. Chowdhury, Andrew Stranieri . Decision trees and multi-level ensemble classifiers for neurological diagnostics. AIMS Medical Science, 2014, 1(1): 1-12. doi: 10.3934/medsci.2014.1.1 |
| [4] | Ayema Haque, Areeba Minhaj, Areeba Ahmed, Owais Khan, Palvisha Qasim, Hasan Fareed, Fatima Nazir, Ayesha Asghar, Kashif Ali, Sobia Mansoor . A meta-analysis to estimate the incidence of thromboembolism in hospitalized COVID-19 patients. AIMS Medical Science, 2020, 7(4): 301-310. doi: 10.3934/medsci.2020020 |
| [5] | Eugenia I. Toki, Polyxeni Fakitsa, Konstantinos Plachouras, Konstantinos Vlachopoulos, Neofytos Kalaitzidis, Jenny Pange . How does noise pollution exposure affect vocal behavior? A systematic review. AIMS Medical Science, 2021, 8(2): 116-137. doi: 10.3934/medsci.2021012 |
| [6] | Bernardo Lopez Abel, María I Martínez-Soto, Maria Luz Couce . Integrative cardiology-state of the art of mind body therapies for the treatment of cardiovascular disease and risk factors. AIMS Medical Science, 2018, 5(1): 80-89. doi: 10.3934/medsci.2018.1.80 |
| [7] | Sima Fallah Arzpeyma, Pooya Bahari Khorram, Maryam Asgharnia, Zahra Mohtasham-Amiri . Investigating the relationship between ultrasound measured optic nerve sheath diameter and preeclampsia. AIMS Medical Science, 2019, 6(3): 250-259. doi: 10.3934/medsci.2019.3.250 |
| [8] | Kavitha Nagandla, Ishita Banerjee, Nafeeza Bt Hj Mohd. Ismail . Adipocytokines in polycystic ovary syndrome (PCOS): A systematic review and meta-analysis. AIMS Medical Science, 2023, 10(2): 178-195. doi: 10.3934/medsci.2023016 |
| [9] | Derek A. Corica, Dylan M. Schaap, Trenton G. Mayberry, Braydon C. Cowan, Mark R. Wakefield, Yujiang Fang . New depths: exploring the current landscape of colorectal cancer. AIMS Medical Science, 2025, 12(1): 105-123. doi: 10.3934/medsci.2025008 |
| [10] | Herbert F. Jelinek, Jemal H. Abawajy, David J. Cornforth, Adam Kowalczyk, Michael Negnevitsky, Morshed U. Chowdhury, Robert Krones, Andrei V. Kelarev . Multi-layer Attribute Selection and Classification Algorithm for the Diagnosis of Cardiac Autonomic Neuropathy Based on HRV Attributes. AIMS Medical Science, 2015, 2(4): 396-409. doi: 10.3934/medsci.2015.4.396 |
The modular intelligent robot platform has important application prospects in the field of tourism management services. Based on the intelligent robot in the scenic area, this paper constructs a partial differential analysis system for tourism management services, and adopts the modular design method to complete the hardware design of the intelligent robot system. Through system analysis, the whole system is divided into 5 major modules, including core control module, power supply module, motor control module, sensor measurement module, wireless sensor network module, to solve the problem of quantification of tourism management services. In the simulation process, the hardware development of wireless sensor network node is carried out based on MSP430F169 microcontroller and CC2420 radio frequency wireless communication chip, and the corresponding physical layer and MAC (Media Access Control) layer data definition and data definition of IEEE802.15.4 protocol are completed for software implementation, and data transmission and networking verification. The experimental results show that the encoder resolution is 1024P/R, the power supply voltage is DC5V5%, and the maximum response frequency is 100 kHz. The algorithm designed by MATLAB software can avoid the existing shortcomings and meet the real-time requirements of the system, which significantly improves the sensitivity and robustness of the intelligent robot.
The Onodi cell (OC) was first described by Onodi in 1904, who defined it as an anatomic condition characterized by the projection of the posterior ethmoid within the sphenoid bone [1]. Today, it is known that OCs or sphenoethmoidal air cells are the posterior-most ethmoid air cells that undergo either superolateral, superior, or lateral pneumatization [2],[3]. During normal childhood, the ethmoid and maxillary sinuses are normally found at birth. However, around seven years of age, the floor of the maxillary sinus is at the same level as the nasal floor [4]. By the age of five years, ethmoid cells start to pneumatize in the posterior direction, where the lateral and medial walls become parallel to each other, then at the age of seven, the frontal sinuses start to pneumatize; however, this is not completed until adolescence [5]. It seems that posterior ethmoid cells extend into the sphenoid bone superolaterally, surrounding the optic channel, and in most cases, an OC [6]. OCs are important for rhinology surgeons because they contain the optic canal [7], and are next to the optic nerve and internal carotid artery, with as little as 0.03 mm (median 0.08 mm) of bone separating them [8]. The prevalence of OCs, reported based on computed tomography (CT) findings, is 7% in the general population; however, a prevalence of up to 42% has been reported when the reports were not based on CT scan findings, whereas the rates are generally higher in Asian populations [9]–[11]. However, the difference in these rates may be due to the different diagnostic tools used rather than to the actual occurrence [12]. Due to the proximity of OCs to the optic nerve, any pathologic condition of the OC can cause devastating complications in the optic system. OC pathologic conditions include infection, mucocele, inflammatory sinusitis, fungus ball, sino-nasal malignancy, and inverted papilloma, and any of these conditions can cause visual changes because most of these conditions are not limited to OCs but extend to the osseous margins [6],[13]. Mucoceles are dilated, mucus-filled cyst-like lesions that occur as a result of chronic obstruction of the sinus ostium resulting from inflammation, trauma, scarring, or obstruction [14]. Mucoceles are defined as benign lesions with expansile and cyst-like characteristics that occur in the paranasal sinuses, and their contents mostly include mucoid secretions and wrinkled respiratory epithelium [15], causing mucous secretions that plug the sinus cavity and cause enlargement of the bony sinus wall [16]. Mucoceles, although most commonly found in the frontal and anterior ethmoid sinuses, are also rarely found in the posterior ethmoid sinus [17]. Therefore, OC mucoceles are very rare [16],[18]. However, when they occur, they can cause many different eye conditions that in some cases can lead to blindness [4]. Due to the proximity of the optic nerve to OCs, OD mucoceles cause visual disorders, including loss of vision, defects of the visual field, proptosis, and extraocular palsies rather than nasal symptoms.
Although the definitive diagnosis of OC mucoceles is established intraoperatively, CT and magnetic resonance imaging (MRI) findings are also used for a preoperative diagnosis [8],[19]. A coronal CT scan is important in the differential diagnosis of a mass with an osseous origin and has a greater impact in the preoperative evaluation of such findings compared to a brain CT scan, which helps identify expansile soft-tissue masses potentially found in the left anterior clinoid process, where destruction of the medial wall and the affected optic canal can be observed and potential bony erosions caused by the mucocele can also be localized [19]. On the other hand, axial and coronal MRIs are very important in the diagnosis of a mucocele in the orbital apex [4],[20], where high signal intensity on T2-weighted and low intensity on T1-weighted MRI characteristically distinguish mucoceles from other masses, such as tumors. The higher protein content of the mucocele mucus may increase the T1 signal intensity on MRI, distinguishing it from the peripheral cystic walls [18],[21].
Treatment of OC mucoceles can be initiated with intravenous corticosteroids and antibiotics if the infection is present; however, to our knowledge, the mechanism underlying how corticosteroids and antibiotics improve visual complications remains unclear [22]. Moreover, the most effective treatment is endoscopic surgical decompression of the mucocele, which can restore visual function [23],[24].
Despite the importance of this condition, due to the rare cases of optic complications caused by isolated OC mucoceles, most of the studies that have been performed included one or two cases. Further, prospective studies have not been performed. Therefore, in this review, we aimed to explore the available data and findings of different case studies that investigated optic neuropathy related to isolated OC mucoceles. We aimed to define the different optic neuropathy conditions related to isolated OC mucoceles, determine the different symptoms and risk factors of each condition, and explore the efficacy of the diagnostic tools and treatment strategies employed.
The objectives of this study were to evaluate the risk factors related to OC mucocele-associated optic neuropathy, determine whether a patient's history or sphenoid or other nasopharyngeal conditions are considered risk factors related to OC mucocele-associated optic neuropathy, determine the effect of the interval between onset of symptoms and intervention on treatment outcomes, identify the most appropriate diagnostic tool for the diagnosis of OC mucoceles, and determine if one of the tools is superior to the other (specifically comparing the diagnostic efficacies of MRI and CT).
This review was performed and reported according to the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) statement. A wide-range electronic search of studies published from 1990 to 2020 using time and language restrictions was performed in databases including PubMed, the Cochrane Library, and Web of Science.
Participants: Patients of any age with visual symptoms related to isolated OC mucoceles were included. Interventions included (1) any type of therapeutic intervention (pharmacological or surgical), and (2) diagnostic intervention. Studies included randomized controlled clinical trials published in English between 1990 and 2020.
Trials involving patients with an optic condition related to OC pathology other than mucoceles, patients with optic neuropathy related to sphenoid mucoceles, animal studies, unsupported opinion of experts, replies to the author/editor, and conference abstracts were excluded.
We searched databases, such as Google Scholar, PubMed, The Cochrane Library, and Web of Science. We combined the search terms and limited the study to the English language. According to the PRISMA checklist, we removed duplicates, and the articles were screened based on title, abstract, and full text.
The electronic search strategy followed in this review resulted in 409 hits, which were reduced to 312 studies after removing duplicates. Of these 312 studies, which were considered eligible for further evaluation, 285 studies were excluded for various reasons. A total of 171 studies were excluded because of inadequate title and abstract, 75 studies were not case studies, 75 studies were not relevant to the subject of this study, three were considered author replies, one was a book, three studies used craniotomy as a treatment, and 17 studies were conducted on sphenoid mucocele-caused optic neuropathy. Finally, we included 20 studies in the qualitative synthesis of the present review (Figure 1).
Table 1 shows the general characteristics of the 20 studies selected for this review. Due to the low incidence of the condition under review and the lack of other studies to describe it, all the studies included in this review were case studies. Each case study reviewed one case; therefore, a total of 20 cases, 65% of which were men (n = 13) and seven were women (35%). The mean age reported in these studies was 54.75 with a standard deviation of 14.62 years and an age range of 28–86 years. All the patients involved were treated at otolaryngology departments. However, the studies were conducted in different countries as follows: four studies were conducted in the USA [11],[19],[25],[26], one in India [27], one in Greece [28], one in Germany [13], three in Japan [2],[4],[20], three in South Korea [8],[29],[30], two in Singapore [6],[14], one in China [31], one in Hyogo [32], and one in Portugal [33]. Their findings were published as journal papers and/or dissertations in English between 1990 and 2020.
| Article | Design | Setting | General characteristics | N (M/F) |
| Kiyotaka Kitagawa 2003 [2] | Case study | Departments of Ophthalmology and Otolaryngology-Head and Neck Surgery Toyama Medical and Pharmaceutical University, Toyama, Japan | Optic neuropathy caused by a compressed mucocele in an OC | 1 (1/0) |
| Yoichiro Fukuda 2006 [4] | Case study | Department of Otolaryngology-Head and Neck Surgery, Gunma University Graduate School of Medicine, Japan | Mucocele in an OC with simultaneous bilateral visual disturbance | 1 (1/0) |
| SA Lim 2008 [6] | Case study | Department of Ophthalmology, Tan Tock Seng Hospital, Singapore | Demonstrates the rare incidence of mucocele development in the osseous structures establishing the optic canal | 1 (1/0) |
| Kyung-Chul Yoon 2006 [8] | Case study | Department of Ophthalmology, Chonnam National University Medical School and Hospital, Gwangju, South Korea | Optic neuropathy caused by a mucocele in an OC | 1 (0/1) |
| Andrew Victores 2012 [11] | Case study | Department of Otolaryngology-Head and Neck Surgery, Baylor College of Medicine, Houston, Texas, USA | Recurrent OC mucocele: rare cause of two different ophthalmic complications | 1 (1/0) |
| T KLINK 2000 [13] | Case study | Department of Ophthalmology, Julius-Maximilians-University, Germany | Acute visual loss caused by an OC | 1 (1/ 0) |
| Song-Tar Toh 2007 [14] | Case study | Department of Otolaryngology-Head and Neck Surgery, Tan Tock Seng Hospital, Singapore | OC mucoceles are a rare cause of optic compressive neuropathy | 1 (1/ 0) |
| J. P. Nickerson 2011 [19] | Case study | Department of Otolaryngology, Johns Hopkins Medical Institute, Baltimore, MD, USA | OC mucocele causing acute vision loss | 1 (0/1) |
| Yoichi Ogata 1998 [20] | Case study | Department of Otolaryngology, Yamaguchi University School of Medicine, Ube, Japan | Optic neuropathy caused by an isolated mucocele in an OC | 1 (1/0) |
| JM Lee 2016 [25] | Case study | Department of Otolaryngology-Head and Neck Surgery, University of Toronto Faculty of Medicine, Toronto | OC mucocele in a 39-year-old woman, and a comprehensive review of the literature on this entity | 1 (0/1) |
| Connor Nathe 2018 [26] | Case study | Department of Ophthalmology, University of California, Irvine School of Medicine, Irvine, CA, USA | Complete orbital apex syndrome caused by an OC mucocele | 1 (0/1) |
| Vishal Annaji Chafale 2015 [27] | Case study | Bangor Institution of Neurosciences, Kolkata, India | Retrobulbar optic neuropathy secondary to isolated sphenoid sinus disease | 1 (0/1) |
| Argyrios Tzamalis 2020 [28] | Case study | University of Thessaloniki, Greece | OC associated optic neuropathy | 1(1/0) |
| Kyung Won Kwon 2019 [29] | Case study | Department of Otorhinolaryngology-Head and Neck Surgery, National Medical Center, Seoul | OC mucocele causing isolated trochlear nerve palsy | 1 (1/0) |
| Yong-Il Cheon 2014 [30] | Case study | Department of Otorhinolaryngology and Biomedical Research Institute, San, Republic of Korea | A fungal ball within OC mucocele causing visual loss nerve palsy | 1 (1/0) |
| Wencan Wu 2010 [31] | Case study | Eye Hospital of Wenzhou Medical College, China | Recovery of visual function in a patient with an OC mucocele causing compressive optic neuropathy | 1 (1/0) |
| Hitoshi Fukuda 2010 [32] | Case study | Department of Neurosurgery, Hyogo | Small OC mucocele causing chronic optic neuropathy | 1 (0/1) |
| Tiago Fuzeta Eça 2018 [33] | Case study | Otolaryngology Department, Centro Hospitalar Lisboa Norte, Hospital Santa Maria, Portugal | Surgical drainage plus optic nerve decompression in acute optic neuropathy by an OC mucocele | 1 (1/0) |
| Efrat Fleissig 2014 [34] | Case study | Faculty of Medicine, Tel Aviv University | Blinding orbital apex syndrome | 1 (0/1) |
| S Kashii 2016 [35] | Case study | Dept. of Ophthalmology, Osaka Red Cross Hospital, Osaka, Osaka, Japan, | Acute visual loss caused by an OC mucocele | 1 (1/0) |
| 20 (13/7) |
Note: M: Male; F: Female; OC: Onodi cell.
 DownLoad:
CSV
DownLoad:
CSV
Each study described different types of neuropathy conditions; however, all these conditions were related to the mucocele of OCs. Most patients, however, had vision loss, eye pain, headache, blurred vision, and an inability to differentiate color, and most of these symptoms had a sudden onset. Vision reduction or loss occurred in 75% of cases [2],[4],[8],[11],[14],[19],[20],[25],[26],[30]–[34],[36], while blurred vision occurred in 30% of cases [6],[11],[13],[20],[27],[28] eye pain in 30% of cases [11],[19],[25],[31],[34],[36], headache in 35% of cases [2],[4],[11],[14],[19],[27],[31], while other symptoms, such as black dots, inability to differentiate colors, and double vision, were found in some cases [13],[14],[29].
Considering risk factors, we found that 45% of patients with OC mucocele did not have any risk factors [8],[13],[20],[27],[28],[31]–[33]. However, we identified other factors that may be related to this condition, including older age (the mean age of the patients was 54.75 years) and male sex (65% of the patients were male, with a ratio of 1 female to about 2 males). Furthermore, 30% of patients had a history of ENT conditions such as chronic sinusitis [11],[25],[34], had undergone endoscopic sinus surgery [6],[11],[25], tracheostomy [19], and had nasopharyngeal carcinoma [4],[14]. On the other hand, 25% of patients had a history of optic conditions, including glaucoma [4],[6],[14], sudden blindness [36], and cataract [2]. Other risk factors include brain fracture [30], age-related macular degeneration, and bilateral pseudophakia [26]. These are shown in Table 2.
Table 3 presents the total time that elapsed from the onset of symptoms and treatment initiation, the treatment strategies used, and their outcomes. The mean time between the onset of symptoms and therapeutic intervention was 16.8 ± 21.8 days. No relation was found between the time from symptom onset and therapeutic intervention and the success or failure of the intervention; however, a longer period appeared to lead to worse results. Although most patients underwent endoscopic sinus surgery to remove the OC mucocele, vision could not be surgically restored in four of these patients [11],[19],[29],[30], whereas the problems were not solved or partially solved in four of six patients who received the pharmacologic intervention (as a solo treatment with antibiotics or corticosteroids). In two patients [20],[34], the usage of corticosteroids worsened the condition, considering that surgical intervention after the failure of pharmacological treatment had been successful in the four cases. Furthermore, the use of pharmacological medication in combination with or after the surgical intervention had a positive effect on the results of the surgical intervention. However, whether this affected the time to full recovery could not be determined as full recovery ranged from hours to months without having a clear pattern.
| Article | Condition | Symptoms | Risk factors |
| Kiyotaka Kitagawa 2003 [2] | OC mucocele | Suddenly complained of headache and decreased vision in the left eye | Underwent cataract surgery |
| Yoichiro Fukuda 2006 [4] | OC mucocele | Sudden frontal headache and two-sided vision deterioration | Noncontributory except for glaucoma |
| SA Lim 2008 [6] | Optic neuritis because of mucocele of OC | Sudden nasal ache with the deterioration of the vision in his right eye and inability to differentiate colors | Nasopharyngeal carcinoma diagnosed and treated with radiotherapy; acute angle-closure glaucoma affecting his left eye two years ago |
| Kyung-Chul Yoon 2006 [8] | OC mucocele compressing the optic nerve mechanically | Acute loss of vision in the right eye | No risk factors |
| Andrew Victores 2012 [11] | Pacification of the right OC carefully bordering the right optic nerve | Blurred vision after the abrupt loss of vision in the right eye with eye pain and headache | CRS |
| T KLINK 2000 [13] | Optic neuropathy caused by an isolated mucocele in OC | Acute visual deterioration in the right eye and a central scotoma, “black dots” appeared in his central visual field | Medical and surgical history was unremarkable |
| Song-Tar Toh 2007 [14] | OC mucocele | Sudden onset of clouding (blurred) of vision | (1) nasopharyngeal carcinoma, 8 years earlier; (2) functional endoscopic sinus surgery 7 years earlier; and (3) chronic angle-closure glaucoma in his left eye, with decreased visual acuity for 1 year |
| J. P. Nickerson 2011 [19] | OC causing expansion of the bone anterior and medial to the optic canal | Unusual sensation in the eye with complete loss of vision | Left orbital fracture at the age of 13 years |
| Yoichi Ogata 1998 [20] | Rhinogenic optic neuropathy arising from an OC | Impaired visual acuity and blurred vision in the left eye. Sudden blindness of the left eye | Medical and surgical history was unremarkable |
| JM Lee 2016 [25] | OC mucocele | Pain with a progressive deterioration in visual perception in her left eye | Previous endoscopic sinus surgery |
| Connor Nathe 2018 [26] | Unilateral orbital apex syndrome due to an OC mucocele. | Progressive vision loss in her right eye; seeing floaters which progressed to total vision loss. No pain or trauma | Age-related macular degeneration and bilateral pseudophakia |
| Vishal Annaji Chafale 2015 [27] | Retrobulbar optic neuropathy | Acute visual worsening in the left eye subsequent frontal headache with no pain in her eye | Medical and surgical history was unremarkable |
| Argyrios Tzamalis 2020 [28] | OC mucocele associated with optic neuropathy | Sudden worsening of vision in the patient's left eye | Medical and surgical history was unremarkable |
| Kyung Won Kwon 2019 [29] | Trochlear nerve palsy due to an isolated mucocele in the left OC | Double vision | Medical and surgical history was unremarkable |
| Yong-Il Cheon 2014 [30] | Oval-shaped mass in the OC, spreading superolaterally around the left orbital apex | Headache and blindness of the left eye | No history of nasal surgery brain infarction for 5 years |
| Wencan Wu 2010 [31] | Compressive optic neuropathy due to an OC mucocele | Sudden decrease in right VA. Loss of vision associated with eye pain and headache | Medical and surgical history was unremarkable |
| Hitoshi Fukuda 2010 [32] | Onodi cell mucocele with long-term history | Gradual loss of vision over the past year | No risk factors |
| Tiago Fuzeta Eça 2018 [33] | Mucocele/pyocele in an OC | Progressive loss of vision in his left eye. No nasal symptoms | Medical and surgical history was unremarkable |
| Efrat Fleissig 2014 [34] | Blinding orbital apex syndrome | Loss of vision in her right eye accompanied by pain during eye movement | CRS |
| S Kashii 2016 [35] | OC mucocele | Periorbital pain around the right eye. Sudden blindness | Past medical history was notable for sudden blindness |
Note: OC: Onodi cell; CRS: Chronic rhinosinusitis; VA: Visual acuity.
DownLoad:
CSV
| Article | Time between symptoms and treatment | Treatment | Result |
| Kiyotaka Kitagawa 2003 [2] | 7 days | Functional endoscopic sinus surgery | VA improved eight days after surgery and complete recovery was achieved after six months |
| Yoichiro Fukuda 2006 [4] | NA | IV corticosteroid: methylprednisolone | VA improved but the expected recovery was not achieved |
| NA | Functional endoscopic sinus surgery | VA was restored | |
| SA Lim 2008 [6] | NA | Functional endoscopic sinus surgery | After a few days VA improved |
| Kyung-Chul Yoon 2006 [8] | 2 days | Functional endoscopic sinus surgery, followed by IV corticosteroids | Six months after treatment, the vision improved; however, mild temporal visual field defects remained |
| Andrew Victores 2012 [11] | 3 days | Transnasal endoscopic sphenoethmoidectomy | No improvement in VA |
| 6 years, the symptoms occurred again for two days | Transnasal endoscopic sphenoethmoidectomy | One week later, the right eye pain had resolved, but the vision loss persisted | |
| T KLINK 2000 [13] | 2 weeks | Functional endoscopic sinus surgery | VA improved nine days after surgery and central scotoma was reduced to small scotoma |
| Song-Tar Toh 2007 [14] | NA | IV antibiotic and corticosteroids | VA improved |
| 1 week | Functional endoscopic sinus surgery | VA improved one week after surgery | |
| J. P. Nickerson 2011 [19] | 5 weeks | Functional endoscopic sinus surgery | No improvement in VA |
| Yoichi Ogata 1998 [20] | NA | Corticosteroids | After four days, the symptoms worsened and blindness occurred |
| 2 months | Functional endoscopic sinus surgery | VA improved one week after surgery | |
| JM Lee 2016 [25] | 1 week | Functional endoscopic sinus surgery | VA improved one hour after surgery. In the first hours after surgery, the patient regained her color vision |
| Connor Nathe 2018 [26] | 16 days | Functional endoscopic sinus surgery with optic nerve decompression | VA improved one day after surgery, with improved ocular motility in the left gaze. One week after surgery, VA was 20/20 with the improvement of extraocular movements in all gazes |
| Vishal Annaji Chafale 2015 [27] | 2 months | The patient refused to undergo endoscopic surgery and the patient's condition was managed pharmacologically with antibiotics, mucolytics, and decongestants | VA improved one month after surgery |
| Argyrios Tzamalis 2020 [28] | 18 hours | Transnasal endoscopic sphenoidectomy. Postoperatively, the patient was set on IV antibiotic and corticosteroids | Surgery failed to treat the deterioration in light perception, which remained unchanged through the next five days after surgery |
| Kyung Won Kwon 2019 [29] | 3 days | Functional endoscopic sinus surgery, followed by IV corticosteroids | After two weeks, diplopia was not improved. After four months, fourth nerve palsy had completely improved |
| Yong-Il Cheon 201 4[30] | NA | Transnasal endoscopic sphenoethmoidectomy | No improvement in VA |
| Wencan Wu 2010 [31] | 2 weeks | IV antibiotic and corticosteroids | After five days, the vision in the right eye improved and ocular pain and the headache disappeared |
| 5 weeks | Functional endoscopic sinus surgery | VA improved five days after surgery | |
| Hitoshi Fukuda 2010 [32] | NA | Pterional-transcranial epidural approach | After surgery, the decompression of the optic canal was complete |
| Tiago Fuzeta Eça 2018 [33] | 2 days | Functional endoscopic sinus surgery | After four days, the visual acuity improved, and after six months, the visual loss reverted completely |
| Efrat Fleissig 2014 [34] | one day | IV corticosteroids: methylprednisolone (1 mg/kg per day) | A few hours later, the patient had worse symptoms including diplopia, swelling in the eyelid, VA deterioration |
| on the same day | Functional endoscopic sinus surgery | Eye movement was restored after surgery; however, no improvement in VA, and no light perception were observed | |
| S Kashii 2016 [35] | NA | The patient refused surgical interventions |
Note: NA: Not applicable; VA: Visual acuity.
DownLoad:
CSV
| Article | Diagnostic tools | Efficacy | The tool success to confirm the condition |
| Kiyotaka Kitagawa 2003 [2] | Ophthalmic examination | Unremarkable | MRI |
| CT | Opacification of the OC | ||
| MRI | Showed an oval-shaped lesion related to the OC that may compress the left optic nerve | ||
| Yoichiro Fukuda 2006 [4] | Ophthalmic examination | Visual function was inadequate to light acuity in both eyes | CT |
| CT | Opacification of the OC | ||
| SA Lim 2008 [6] | Ophthalmic examination | Corrected VA was 6/30 on the affected right eye and 6/12 on the left | MRI |
| MRI | Revealed an opacification of OCs indicating a mucocele | ||
| Kyung-Chul Yoon 2006 [8] | Ophthalmic examination | Unremarkable | MRI |
| CT | Opacification of the OC | ||
| MRI | Revealed a mass with signal intensity in the right OCl compressing the right optic nerve | ||
| Andrew Victores 2012 [11] | CT and MRI | Opacification of the OC | MRI |
| T KLINK 2000 [13] | Clinical presentation | Unremarkable | MRI |
| MRI | Showed a kidney bean-shaped mass in the right orbital apex, which compressed the optic nerve | ||
| Song-Tar Toh 2007 [14] | Ophthalmic examination | Failed to detect the OC opacification | CT |
| CT | Revealed a mucocele in the OC | ||
| J. P. Nickerson 2011 [19] | CT | Confirmed extension of the bone anterior to the optic canal as a result of an OC with low-density material | MRI |
| MRI | Established a marginated signal extending from the OC towards the orbital canal | ||
| Yoichi Ogata 1998 [20] | CT | Failed to detect the OC opacification | MRI |
| An axial CT with an 8-mm thickness | Showed no abnormal findings | ||
| MRI | Showed a small high-intensity area in the left OC | ||
| JM Lee 2016 [25] | Ophthalmological examination | Edema of the left optic disc | CT |
| MRI | A suspected mucocele in the left OC | ||
| CT | Opacification of the OC | ||
| Connor Nathe 2018 [26] | The patient had no light perception (NLP) in the right eye. VA in the left eye was 20/50, which was later confirmed to be her baseline VA in both eyes | MRI | |
| CT | Opacification of the OC | ||
| MRI | Demonstrated an opacified right sphenoethmoidal air cell, which extended to the anterior clinoid process close to the optic nerve | ||
| Vishal Annaji Chafale 2015 [27] | Clinical examination | Unremarkable | CT |
| MRI | T2-weighted images presented high signal intensity, isointense on T1 with central hyperintense foci in the left orbital apex spreading to compress the optic nerve | ||
| CT | Opacification of the OC | ||
| Argyrios Tzamalis 2020 [28] | Clinical presentation | A protruding relative afferent pupillary defect (RAPD) was noted on the left side | MRI |
| Dilated fundoscopy | Was not diagnostic for optic disc edema | ||
| MRI | Showed a hyper-dense cystic bilobed mass in the OC | ||
| Kyung Won Kwon 2019 [29] | Ophthalmologic examination | Failed to detect the OC opacification | MRI |
| MRI | Confirmed the presence of OC lesion with hypointense foci | ||
| Yong-Il Cheon 2014 [30] | MRI | Showed an oval-shaped mass in the OC | CT |
| Endoscopic examination | The nasal cavity was unremarkable | ||
| CT | Revealed a dense, oval-shaped mass in the OC, extending superolaterally around the orbital canal | ||
| Wencan Wu 2010 [31] | Ophthalmic examination | Failed to suggest OC opacification | MRI |
| Fundoscopy | Showed a light right optic disc | ||
| CT | Showed a dense mass in the OC | ||
| MRI | Established the presence of OC lesion that deteriorated the right optic nerve | ||
| Hitoshi Fukuda 2010 [32] | Ophthalmological examination | Visual acuity of 20/16, 20/32 in the right and left eyes | MRI |
| CT | Opacification of the OC bilaterally | ||
| MRI | An irregular cystic mass lesion in the OC surrounding the left optic canal | ||
| Tiago Fuzeta Eça 2018[33] | Ophthalmologic examination | Showed a complete loss of vision on the left eye | MRI |
| CT | Opacification of the OC | ||
| MRI | Revealed the lesion causing remodeling of the optic canal | ||
| Efrat Fleissig 2014 [34] | Clinical examination | Swelling and erythema of the right eyelid with afferent pupillary defect | MRI |
| CT | Opacification of the OC | ||
| MRI | Opacification of the OC | ||
| S Kashii 2016 [35] | MRI | An oval-shaped lesion in the OC which compressed the optic nerve | CT |
| CT | Opacification of the OC |
Note: OC: Onodi cell; VA: Visual acuity; CT: Computed tomography; MRI: Magnetic Resonance Imaging.
DownLoad:
CSV
In the 20 studies examined in this review, physicians had used a variety of diagnostic tools, of which clinical examination, CT, and MRI scans were the most widely used. All the patients underwent a clinical examination, while 15 patients (75%) underwent a CT scan, which successfully confirmed the condition in six patients (40% diagnostic success rate). Furthermore, 17 patients underwent an MRI scan, which successfully confirmed the condition in 14 patients (82.3% diagnostic success rate). On the other hand, clinical examination failed in 25% of cases to identify the condition or remained unremarkable (Table 4).
As OC mucoceles cause optic symptoms rather than nasal symptoms, most patients with ethmoid mucoceles primarily visit the ophthalmology department rather than the rhinological department. In this review, we found that most patients (75%) had visual disturbances that could lead to vision loss. This was consistent with the findings of Loo et al. [37] and Yoo-Suk Kim et al. [38]. Furthermore, in another systematic review, all the 16 patients included in the analysis presented with a decrease in visual acuity [25]. However, the high prevalence of ophthalmologic manifestations caused by OC mucoceles, according to many studies, is underestimated [37]–[39]. Other symptoms noted in patients in this review include headache (35%) and eye pain (30%). Argyrios Tzamalis et al. found that pain seemed to be either headache or peri-orbital pain in 13/24 of the patients (54.2%) [28].
Regarding the risk factors related to optic neuropathy related to OC mucoceles, we found that half of the patients had no risk factors. However, this study showed that a higher prevalence of this condition is observed in Asian people than in people of other ethnicities, as 55% of the studies in this review were conducted in Asian countries [9]–[11]. Lee found in his review that 75% of the patients were from Asian countries [25]. Another risk factor identified in our study was older age (the mean age of patients was 54.75 years). Furthermore, 35% of the patients had a history of ENT conditions, which could be related to the history of nasal conditions and the development of OC mucocele and its complications. Furthermore, a history of optic conditions was considered a risk factor for developing optic neuropathy conditions related to OC mucoceles. Therefore, overall, our review demonstrates that the risk factors for developing optic neuropathic conditions related to OC mucoceles include Asian ethnicity, older age, and a history of either nasal or optic conditions.
It is hypothesized that surgical decompression in the early stages is critical for a good outcome. Based on this hypothesis, the time from symptom onset to the time of surgery should be minimum. In this review, however, we did not find a relationship between the time between symptom onset and surgery and the outcomes of the surgery. The mean time between the onset of symptoms and surgical intervention was 16.8 ± 21.8 days. According to Lee, the period between the onset of symptoms and surgical intervention varied from a few hours to 2 years, with no clear relation between this period and the outcomes of surgery for vision restoration [25]. This result is also in line with the findings of the study by Yoo-Suk Kim, where no correlation was found between the two variables [38]. However, other studies confirmed the above-mentioned hypothesis; for instance, Lee et al. found that patients with optic neuropathies who underwent surgical intervention in the early stages after the onset of symptoms had improved visual outcomes compared to patients who were treated at later stages [25]. Moreover, another study by Yoon et al. showed that early-stage surgery could not improve the visual outcomes and that it may even worsen them [10], suggesting that it is difficult to accurately predict the real degree of damage that happens to the optic nerve in the early stages of the disease. Therefore, this parameter (the period between onset of symptoms and intervention) could not be considered an important variable in predicting the outcomes of intervention.
Regarding treatment strategies, most patients underwent endoscopic sinus surgery to remove the OC mucocele (18/20; 90%) with a success rate of 77%. While pharmacologic intervention as a solo treatment (IV corticosteroids or/and antibiotic) was used in only six patients, with a success rate of only 33%, the condition of two patients (33%) treated with pharmacologic intervention worsened. This is in agreement with the results of Argyrios Tzamalis [28], who indicated a decrease in visual outcomes after administration of steroids and antibiotics in the early stages. Although the treatment at first caused immediate improvement and reduced optic decompression, it did not improve visual symptoms. Therefore, the majority of the patients (21/24; 87.5%) were asked to undergo endoscopic sinus surgery (ESS), which is considered the most common treatment for OC mucoceles due to its fewer complications, less invasive nature, and quicker post-operative recovery time [23],[24]. Therefore, in our review, we could not determine the role of antibiotics and corticosteroids in the treatment of OC-related optic complications.
Although the definitive diagnosis of OC mucoceles is established intraoperatively, CT and MRI findings play a great role in providing a preoperative diagnosis [4],[19]. In the studies included in this review, CT and MRI were the most widely used diagnostic tools. All the patients underwent a clinical examination, while 15 patients (75%) underwent a CT scan, which successfully confirmed the condition in six patients (40% diagnostic success rate). Furthermore, 17 patients underwent an MRI scan, which successfully confirmed the condition in 14 patients (82.3% diagnostic success rate). Consistent with our results, Lee showed in his study that 13 of the 16 patients included in his review (81%) underwent both CT and MRI [25]. Therefore, axial and coronal MRI scans are valuable for distinguishing orbital apex lesions, and a coronal CT scan is useful for the differential diagnosis of a mass of an osseous origin and preoperative evaluation. However, according to our results, MRI scans have a superior ability to demonstrate this abnormality compared to CT scans.
This study also has some limitations. Among the most important of these is its dependence on case studies. However, as the condition reviewed here is rare, there is a lack of studies with a larger number of patients. Further, the search was limited to studies published in English. Finally, it did not include any study from Saudi Arabia or any of the Arabian countries as no studies have been conducted in these countries.
On the other hand, this study also has several advantages. The literature search was conducted in databases such as PubMed, one of the major databases for high-quality scientific research in the fields of medicine. Moreover, to the best of our knowledge, this is the first study of its type in Arabian countries. Finally, one of the advantages of this study is that it included a large number of studies published over a long period, from 1990 to 2020.
In this review, we discussed the results of 20 studies related to rare cases of Onodi cell-related optic neuropathy, finding that optic neuropathy due to Onodi cell mucocele has a higher incidence in Asian populations with risk factors, such as older age and history of nasal or optic conditions, and that visual disturbance is the most common symptom accompanying any type of optic condition.
Regarding diagnosis and treatment, we found that endoscopic sinus surgery is an effective and safe intervention for these patients; however, the period between the onset of symptoms and surgery does not affect the outcomes of the surgery. On the other hand, corticosteroids and/or antibiotics cannot replace surgery and may cause worsening of the condition. Moreover, MRI scans are superior to CT scans for detecting this abnormality, but both are superior to other diagnostic tools. Finally, further investigations should be conducted to study the causes of the low incidence of optic neuropathy related to OC mucocele in the eastern region.
| [1] |
Z. Guo, K. Yu, A. K. Bashir, D. Zhang, Y. D. Al-Otaibi, M. Guizani, Deep information fusion-driven POI scheduling for mobile social networks, IEEE Network, 36 (2022), 210–216. https://doi.org/10.1109/MNET.102.2100394 doi: 10.1109/MNET.102.2100394

|
| [2] |
Y. Li, H. Ma, L. Wang, S. Mao, G. Wang, Optimized content caching and user association for edge computing in densely deployed heterogeneous networks, IEEE Trans. Mob. Comput., 21 (2022), 2130–2142. https://doi.org/10.1109/TMC.2020.3033563 doi: 10.1109/TMC.2020.3033563
|
| [3] |
Q. Zhang, K. Yu, Z. Guo, S. Garg, J. J. P. C. Rodrigues, M. M. Hassan, et al., Graph neural networks-driven traffic forecasting for connected internet of vehicles, IEEE Trans. Network Sci. Eng., 9 (2022), 3015–3027. https://doi.org/10.1109/TNSE.2021.3126830 doi: 10.1109/TNSE.2021.3126830
|
| [4] |
S. Xia, Z. Yao, Y. Li, S. Mao, Online distributed offloading and computing resource management with energy harvesting for heterogeneous MEC-enabled IoT, IEEE Trans. Wireless Commun., 20 (2022), 6743–6757.https://doi.org/10.1109/TWC.2021.3076201 doi: 10.1109/TWC.2021.3076201
|
| [5] |
Z. Guo, K. Yu, Z. Lv, K. K. R. Choo, P. Shi, J. J. P. C. Rodrigues, Deep federated learning enhanced secure POI microservices for cyber-physical systems, IEEE Wireless Commun., 29 (2022), 22–29. https://doi.org/10.1109/MWC.002.210027 doi: 10.1109/MWC.002.210027
|
| [6] | L. Zhao, Z. Yin, K. Yu, X. Tang, L. Xu, Z. Guo, et al., A fuzzy logic based intelligent multi-attribute routing scheme for two-layered SDVNs, IEEE Trans. Network Serv. Manage., 2022, early access, https://doi.org/10.1109/TNSM.2022.3202741 |
| [7] |
D. Peng, D. He, Y. Li, Z. Wang, Integrating terrestrial and satellite multibeam systems toward 6G: Techniques and challenges for interference mitigation, IEEE Wireless Commun., 29 (2022), 24–31. https://doi.org/10.1109/MWC.002.00293 doi: 10.1109/MWC.002.00293
|
| [8] |
L. Huang, R. Nan, K. Chi, Q. Hua, K. Yu, N. Kumar, et al., Throughput guarantees for multi-cell wireless powered communication networks with non-orthogonal multiple access, IEEE Trans. Veh. Technol., 71 (2022), 12104–12116. https://doi.org/10.1109/TVT.2022.3189699 doi: 10.1109/TVT.2022.3189699
|
| [9] |
Z. Cai, X. Zheng, J. Yu, A Differential-private framework for urban traffic flows estimation via taxi companies, IEEE Trans. Ind. Inf., 15 (2019), 6492–6499. https://doi.org/10.1109/TII.2019.2911697 doi: 10.1109/TII.2019.2911697
|
| [10] |
Z. Zhou, X. Dong, Z. Li, K. Yu, C. Ding, Y. Yang, Spatio-temporal feature encoding for traffic accident detection in VANET environment, IEEE Trans. Intell. Transp. Syst., 23 (2022), 19772–19781. https://doi.org/10.1109/TITS.2022.3147826 doi: 10.1109/TITS.2022.3147826
|
| [11] |
X. Zheng, Z. Cai, Privacy-preserved data sharing towards multiple parties in industrial IoTs, IEEE J. Sel. Areas Commun., 38 (2020), 968–979. https://doi.org/10.1109/JSAC.2020.2980802 doi: 10.1109/JSAC.2020.2980802
|
| [12] |
S. H. Ivanov, C. Webster, E. Stoilova, D. Slobodskoy, Biosecurity, crisis management, automation technologies and economic performance of travel, tourism and hospitality companies—A conceptual framework, Tourism Econ., 28 (2022), 3–26. https://doi.org/10.1177/13548166209465 doi: 10.1177/13548166209465
|
| [13] |
B. Hysa, A. Karasek, I. Zdonek, Social media usage by different generations as a tool for sustainable tourism marketing in society 5.0 idea, Sustainability, 13 (2021), 1018. https://doi.org/10.3390/su13031018 doi: 10.3390/su13031018
|
| [14] |
H. E. Arici, M. A. Köseoglu, A. Sökmen, The intellectual structure of customer experience research in service scholarship: a bibliometric analysis, Serv. Ind. J., 42 (2022), 514–550. https://doi.org/10.1080/02642069.2022.2043286 doi: 10.1080/02642069.2022.2043286
|
| [15] |
Y. Wu, Z. Huo, W. Xing, Z, Ma, H. M. A. Aldeeb, Application of experience economy and recommendation algorithm in tourism reuse of industrial wasteland, Appl. Math. Nonlinear Sci., 6 (2021), 227–238. https://doi.org/10.2478/amns.2021.2.00039 doi: 10.2478/amns.2021.2.00039
|
| [16] |
J. Reis, N. Melão, J. Salvadorinho, B. Soares, A. Rosetea, Service robots in the hospitality industry: The case of Henn-na hotel, Technol. Soc., 63 (2020), 101423. https://doi.org/10.1016/j.techsoc.2020.101423 doi: 10.1016/j.techsoc.2020.101423
|
| [17] |
R. Kervenoael, R. Hasan, A. Schwob, E. Goh, Leveraging human-robot interaction in hospitality services: Incorporating the role of perceived value, empathy, and information sharing into visitors' intentions to use social robots, Tourism Manage., 78 (2020), 104042. https://doi.org/10.1016/j.tourman.2019.104042 doi: 10.1016/j.tourman.2019.104042
|
| [18] |
H. Fan, W. Gao, B. Han, How does (im) balanced acceptance of robots between customers and frontline employees affect hotels' service quality, Comput. Human Behav., 133 (2022), 107287. https://doi.org/10.1016/j.chb.2022.107287 doi: 10.1016/j.chb.2022.107287
|
| [19] |
S. H. W. Chuah, E. C. X. Aw, C. F. Cheng, A silver lining in the COVID-19 cloud: Examining customers' value perceptions, willingness to use and pay more for robotic restaurants, J. Hosp. Market. Manage., 31 (2022), 49–76. https://doi.org/10.1080/19368623.2021.1926038 doi: 10.1080/19368623.2021.1926038
|
| [20] |
S. Ivanov, C. Webster, Willingness-to-pay for robot-delivered tourism and hospitality services–an exploratory study, Int. J. Contemp. Hosp. Manage., 33 (2021), 3926–3955. https://doi.org/10.1108/IJCHM-09-2020-1078 doi: 10.1108/IJCHM-09-2020-1078
|
| [21] |
A. Tuomi, I. P. Tussyadiah, J. Stienmetz, Applications and implications of service robots in hospitality, Cornell Hosp. Q., 62 (2021), 232–247. https://doi.org/10.1177/193896552092396 doi: 10.1177/193896552092396
|
| [22] |
S. M. C. Loureiro, R. G. Bilro, The role of commitment amongst tourists and intelligent virtual assistants, J. Promot. Manage., 28 (2022), 175–188. https://doi.org/10.1080/10496491.2021.1987979 doi: 10.1080/10496491.2021.1987979
|
| [23] |
S. Kabadayi, F. Ali, H. Choi, H. Joosten, C. Lu, Smart service experience in hospitality and tourism services: A conceptualization and future research agenda, J. Serv. Manage., 30 (2019), 326–348. https://doi.org/10.1108/JOSM-11-2018-0377 doi: 10.1108/JOSM-11-2018-0377
|
| [24] |
C. T. Zhang, L. P. Liu, Research on coordination mechanism in three-level green supply chain under non-cooperative game, Appl. Math. Modell., 37 (2013), 3369–3379. https://doi.org/10.1016/j.apm.2012.08.006 doi: 10.1016/j.apm.2012.08.006
|
| [25] |
F. Ruggiero, V. Lippiello, B.Siciliano, Nonprehensile dynamic manipulation: A survey, IEEE Robot. Autom. Let., 3 (2018), 1711–1718. https://doi.org/10.1109/LRA.2018.2801939 doi: 10.1109/LRA.2018.2801939
|
| [26] |
X. Zhang, T. Feng, Q. Niu, X. Deng, A novel swarm optimisation algorithm based on a mixed-distribution model, Appl. Sci., 8 (2018), 632. https://doi.org/10.3390/app8040632 doi: 10.3390/app8040632
|
| [27] |
X. Yuan, J. Shi, L. Gu, A review of deep learning methods for semantic segmentation of remote sensing imagery, Exp. Syst. Appl., 169 (2021), 114417. https://doi.org/10.1016/j.eswa.2020.114417 doi: 10.1016/j.eswa.2020.114417
|
| [28] |
V. Q. Trinh, N. Seetaram, Top-management compensation and survival likelihood: the case of tourism and leisure firms in the US, Ann. Tourism Res., 92 (2022), 103323. https://doi.org/10.1016/j.annals.2021.103323 doi: 10.1016/j.annals.2021.103323
|
| 1. | BerylS Ominde, Joyce Ikubor, PatrickS Igbigbi, Computed tomographic study on the prevalence of the Onodi cell, 2023, 0, 0331-8540, 0, 10.4103/njbcs.njbcs_20_22 |







Figures(8) / Tables(3)

Tingting Yang, Yi He. Design of intelligent robots for tourism management service based on green computing[J]. Mathematical Biosciences and Engineering, 2023, 20(3): 4798-4815. doi: 10.3934/mbe.2023222

| Article | Design | Setting | General characteristics | N (M/F) |
| Kiyotaka Kitagawa 2003 [2] | Case study | Departments of Ophthalmology and Otolaryngology-Head and Neck Surgery Toyama Medical and Pharmaceutical University, Toyama, Japan | Optic neuropathy caused by a compressed mucocele in an OC | 1 (1/0) |
| Yoichiro Fukuda 2006 [4] | Case study | Department of Otolaryngology-Head and Neck Surgery, Gunma University Graduate School of Medicine, Japan | Mucocele in an OC with simultaneous bilateral visual disturbance | 1 (1/0) |
| SA Lim 2008 [6] | Case study | Department of Ophthalmology, Tan Tock Seng Hospital, Singapore | Demonstrates the rare incidence of mucocele development in the osseous structures establishing the optic canal | 1 (1/0) |
| Kyung-Chul Yoon 2006 [8] | Case study | Department of Ophthalmology, Chonnam National University Medical School and Hospital, Gwangju, South Korea | Optic neuropathy caused by a mucocele in an OC | 1 (0/1) |
| Andrew Victores 2012 [11] | Case study | Department of Otolaryngology-Head and Neck Surgery, Baylor College of Medicine, Houston, Texas, USA | Recurrent OC mucocele: rare cause of two different ophthalmic complications | 1 (1/0) |
| T KLINK 2000 [13] | Case study | Department of Ophthalmology, Julius-Maximilians-University, Germany | Acute visual loss caused by an OC | 1 (1/ 0) |
| Song-Tar Toh 2007 [14] | Case study | Department of Otolaryngology-Head and Neck Surgery, Tan Tock Seng Hospital, Singapore | OC mucoceles are a rare cause of optic compressive neuropathy | 1 (1/ 0) |
| J. P. Nickerson 2011 [19] | Case study | Department of Otolaryngology, Johns Hopkins Medical Institute, Baltimore, MD, USA | OC mucocele causing acute vision loss | 1 (0/1) |
| Yoichi Ogata 1998 [20] | Case study | Department of Otolaryngology, Yamaguchi University School of Medicine, Ube, Japan | Optic neuropathy caused by an isolated mucocele in an OC | 1 (1/0) |
| JM Lee 2016 [25] | Case study | Department of Otolaryngology-Head and Neck Surgery, University of Toronto Faculty of Medicine, Toronto | OC mucocele in a 39-year-old woman, and a comprehensive review of the literature on this entity | 1 (0/1) |
| Connor Nathe 2018 [26] | Case study | Department of Ophthalmology, University of California, Irvine School of Medicine, Irvine, CA, USA | Complete orbital apex syndrome caused by an OC mucocele | 1 (0/1) |
| Vishal Annaji Chafale 2015 [27] | Case study | Bangor Institution of Neurosciences, Kolkata, India | Retrobulbar optic neuropathy secondary to isolated sphenoid sinus disease | 1 (0/1) |
| Argyrios Tzamalis 2020 [28] | Case study | University of Thessaloniki, Greece | OC associated optic neuropathy | 1(1/0) |
| Kyung Won Kwon 2019 [29] | Case study | Department of Otorhinolaryngology-Head and Neck Surgery, National Medical Center, Seoul | OC mucocele causing isolated trochlear nerve palsy | 1 (1/0) |
| Yong-Il Cheon 2014 [30] | Case study | Department of Otorhinolaryngology and Biomedical Research Institute, San, Republic of Korea | A fungal ball within OC mucocele causing visual loss nerve palsy | 1 (1/0) |
| Wencan Wu 2010 [31] | Case study | Eye Hospital of Wenzhou Medical College, China | Recovery of visual function in a patient with an OC mucocele causing compressive optic neuropathy | 1 (1/0) |
| Hitoshi Fukuda 2010 [32] | Case study | Department of Neurosurgery, Hyogo | Small OC mucocele causing chronic optic neuropathy | 1 (0/1) |
| Tiago Fuzeta Eça 2018 [33] | Case study | Otolaryngology Department, Centro Hospitalar Lisboa Norte, Hospital Santa Maria, Portugal | Surgical drainage plus optic nerve decompression in acute optic neuropathy by an OC mucocele | 1 (1/0) |
| Efrat Fleissig 2014 [34] | Case study | Faculty of Medicine, Tel Aviv University | Blinding orbital apex syndrome | 1 (0/1) |
| S Kashii 2016 [35] | Case study | Dept. of Ophthalmology, Osaka Red Cross Hospital, Osaka, Osaka, Japan, | Acute visual loss caused by an OC mucocele | 1 (1/0) |
| 20 (13/7) |
Note: M: Male; F: Female; OC: Onodi cell.
DownLoad:
CSV
| Article | Condition | Symptoms | Risk factors |
| Kiyotaka Kitagawa 2003 [2] | OC mucocele | Suddenly complained of headache and decreased vision in the left eye | Underwent cataract surgery |
| Yoichiro Fukuda 2006 [4] | OC mucocele | Sudden frontal headache and two-sided vision deterioration | Noncontributory except for glaucoma |
| SA Lim 2008 [6] | Optic neuritis because of mucocele of OC | Sudden nasal ache with the deterioration of the vision in his right eye and inability to differentiate colors | Nasopharyngeal carcinoma diagnosed and treated with radiotherapy; acute angle-closure glaucoma affecting his left eye two years ago |
| Kyung-Chul Yoon 2006 [8] | OC mucocele compressing the optic nerve mechanically | Acute loss of vision in the right eye | No risk factors |
| Andrew Victores 2012 [11] | Pacification of the right OC carefully bordering the right optic nerve | Blurred vision after the abrupt loss of vision in the right eye with eye pain and headache | CRS |
| T KLINK 2000 [13] | Optic neuropathy caused by an isolated mucocele in OC | Acute visual deterioration in the right eye and a central scotoma, “black dots” appeared in his central visual field | Medical and surgical history was unremarkable |
| Song-Tar Toh 2007 [14] | OC mucocele | Sudden onset of clouding (blurred) of vision | (1) nasopharyngeal carcinoma, 8 years earlier; (2) functional endoscopic sinus surgery 7 years earlier; and (3) chronic angle-closure glaucoma in his left eye, with decreased visual acuity for 1 year |
| J. P. Nickerson 2011 [19] | OC causing expansion of the bone anterior and medial to the optic canal | Unusual sensation in the eye with complete loss of vision | Left orbital fracture at the age of 13 years |
| Yoichi Ogata 1998 [20] | Rhinogenic optic neuropathy arising from an OC | Impaired visual acuity and blurred vision in the left eye. Sudden blindness of the left eye | Medical and surgical history was unremarkable |
| JM Lee 2016 [25] | OC mucocele | Pain with a progressive deterioration in visual perception in her left eye | Previous endoscopic sinus surgery |
| Connor Nathe 2018 [26] | Unilateral orbital apex syndrome due to an OC mucocele. | Progressive vision loss in her right eye; seeing floaters which progressed to total vision loss. No pain or trauma | Age-related macular degeneration and bilateral pseudophakia |
| Vishal Annaji Chafale 2015 [27] | Retrobulbar optic neuropathy | Acute visual worsening in the left eye subsequent frontal headache with no pain in her eye | Medical and surgical history was unremarkable |
| Argyrios Tzamalis 2020 [28] | OC mucocele associated with optic neuropathy | Sudden worsening of vision in the patient's left eye | Medical and surgical history was unremarkable |
| Kyung Won Kwon 2019 [29] | Trochlear nerve palsy due to an isolated mucocele in the left OC | Double vision | Medical and surgical history was unremarkable |
| Yong-Il Cheon 2014 [30] | Oval-shaped mass in the OC, spreading superolaterally around the left orbital apex | Headache and blindness of the left eye | No history of nasal surgery brain infarction for 5 years |
| Wencan Wu 2010 [31] | Compressive optic neuropathy due to an OC mucocele | Sudden decrease in right VA. Loss of vision associated with eye pain and headache | Medical and surgical history was unremarkable |
| Hitoshi Fukuda 2010 [32] | Onodi cell mucocele with long-term history | Gradual loss of vision over the past year | No risk factors |
| Tiago Fuzeta Eça 2018 [33] | Mucocele/pyocele in an OC | Progressive loss of vision in his left eye. No nasal symptoms | Medical and surgical history was unremarkable |
| Efrat Fleissig 2014 [34] | Blinding orbital apex syndrome | Loss of vision in her right eye accompanied by pain during eye movement | CRS |
| S Kashii 2016 [35] | OC mucocele | Periorbital pain around the right eye. Sudden blindness | Past medical history was notable for sudden blindness |
Note: OC: Onodi cell; CRS: Chronic rhinosinusitis; VA: Visual acuity.
DownLoad:
CSV
| Article | Time between symptoms and treatment | Treatment | Result |
| Kiyotaka Kitagawa 2003 [2] | 7 days | Functional endoscopic sinus surgery | VA improved eight days after surgery and complete recovery was achieved after six months |
| Yoichiro Fukuda 2006 [4] | NA | IV corticosteroid: methylprednisolone | VA improved but the expected recovery was not achieved |
| NA | Functional endoscopic sinus surgery | VA was restored | |
| SA Lim 2008 [6] | NA | Functional endoscopic sinus surgery | After a few days VA improved |
| Kyung-Chul Yoon 2006 [8] | 2 days | Functional endoscopic sinus surgery, followed by IV corticosteroids | Six months after treatment, the vision improved; however, mild temporal visual field defects remained |
| Andrew Victores 2012 [11] | 3 days | Transnasal endoscopic sphenoethmoidectomy | No improvement in VA |
| 6 years, the symptoms occurred again for two days | Transnasal endoscopic sphenoethmoidectomy | One week later, the right eye pain had resolved, but the vision loss persisted | |
| T KLINK 2000 [13] | 2 weeks | Functional endoscopic sinus surgery | VA improved nine days after surgery and central scotoma was reduced to small scotoma |
| Song-Tar Toh 2007 [14] | NA | IV antibiotic and corticosteroids | VA improved |
| 1 week | Functional endoscopic sinus surgery | VA improved one week after surgery | |
| J. P. Nickerson 2011 [19] | 5 weeks | Functional endoscopic sinus surgery | No improvement in VA |
| Yoichi Ogata 1998 [20] | NA | Corticosteroids | After four days, the symptoms worsened and blindness occurred |
| 2 months | Functional endoscopic sinus surgery | VA improved one week after surgery | |
| JM Lee 2016 [25] | 1 week | Functional endoscopic sinus surgery | VA improved one hour after surgery. In the first hours after surgery, the patient regained her color vision |
| Connor Nathe 2018 [26] | 16 days | Functional endoscopic sinus surgery with optic nerve decompression | VA improved one day after surgery, with improved ocular motility in the left gaze. One week after surgery, VA was 20/20 with the improvement of extraocular movements in all gazes |
| Vishal Annaji Chafale 2015 [27] | 2 months | The patient refused to undergo endoscopic surgery and the patient's condition was managed pharmacologically with antibiotics, mucolytics, and decongestants | VA improved one month after surgery |
| Argyrios Tzamalis 2020 [28] | 18 hours | Transnasal endoscopic sphenoidectomy. Postoperatively, the patient was set on IV antibiotic and corticosteroids | Surgery failed to treat the deterioration in light perception, which remained unchanged through the next five days after surgery |
| Kyung Won Kwon 2019 [29] | 3 days | Functional endoscopic sinus surgery, followed by IV corticosteroids | After two weeks, diplopia was not improved. After four months, fourth nerve palsy had completely improved |
| Yong-Il Cheon 201 4[30] | NA | Transnasal endoscopic sphenoethmoidectomy | No improvement in VA |
| Wencan Wu 2010 [31] | 2 weeks | IV antibiotic and corticosteroids | After five days, the vision in the right eye improved and ocular pain and the headache disappeared |
| 5 weeks | Functional endoscopic sinus surgery | VA improved five days after surgery | |
| Hitoshi Fukuda 2010 [32] | NA | Pterional-transcranial epidural approach | After surgery, the decompression of the optic canal was complete |
| Tiago Fuzeta Eça 2018 [33] | 2 days | Functional endoscopic sinus surgery | After four days, the visual acuity improved, and after six months, the visual loss reverted completely |
| Efrat Fleissig 2014 [34] | one day | IV corticosteroids: methylprednisolone (1 mg/kg per day) | A few hours later, the patient had worse symptoms including diplopia, swelling in the eyelid, VA deterioration |
| on the same day | Functional endoscopic sinus surgery | Eye movement was restored after surgery; however, no improvement in VA, and no light perception were observed | |
| S Kashii 2016 [35] | NA | The patient refused surgical interventions |
Note: NA: Not applicable; VA: Visual acuity.
DownLoad:
CSV
| Article | Diagnostic tools | Efficacy | The tool success to confirm the condition |
| Kiyotaka Kitagawa 2003 [2] | Ophthalmic examination | Unremarkable | MRI |
| CT | Opacification of the OC | ||
| MRI | Showed an oval-shaped lesion related to the OC that may compress the left optic nerve | ||
| Yoichiro Fukuda 2006 [4] | Ophthalmic examination | Visual function was inadequate to light acuity in both eyes | CT |
| CT | Opacification of the OC | ||
| SA Lim 2008 [6] | Ophthalmic examination | Corrected VA was 6/30 on the affected right eye and 6/12 on the left | MRI |
| MRI | Revealed an opacification of OCs indicating a mucocele | ||
| Kyung-Chul Yoon 2006 [8] | Ophthalmic examination | Unremarkable | MRI |
| CT | Opacification of the OC | ||
| MRI | Revealed a mass with signal intensity in the right OCl compressing the right optic nerve | ||
| Andrew Victores 2012 [11] | CT and MRI | Opacification of the OC | MRI |
| T KLINK 2000 [13] | Clinical presentation | Unremarkable | MRI |
| MRI | Showed a kidney bean-shaped mass in the right orbital apex, which compressed the optic nerve | ||
| Song-Tar Toh 2007 [14] | Ophthalmic examination | Failed to detect the OC opacification | CT |
| CT | Revealed a mucocele in the OC | ||
| J. P. Nickerson 2011 [19] | CT | Confirmed extension of the bone anterior to the optic canal as a result of an OC with low-density material | MRI |
| MRI | Established a marginated signal extending from the OC towards the orbital canal | ||
| Yoichi Ogata 1998 [20] | CT | Failed to detect the OC opacification | MRI |
| An axial CT with an 8-mm thickness | Showed no abnormal findings | ||
| MRI | Showed a small high-intensity area in the left OC | ||
| JM Lee 2016 [25] | Ophthalmological examination | Edema of the left optic disc | CT |
| MRI | A suspected mucocele in the left OC | ||
| CT | Opacification of the OC | ||
| Connor Nathe 2018 [26] | The patient had no light perception (NLP) in the right eye. VA in the left eye was 20/50, which was later confirmed to be her baseline VA in both eyes | MRI | |
| CT | Opacification of the OC | ||
| MRI | Demonstrated an opacified right sphenoethmoidal air cell, which extended to the anterior clinoid process close to the optic nerve | ||
| Vishal Annaji Chafale 2015 [27] | Clinical examination | Unremarkable | CT |
| MRI | T2-weighted images presented high signal intensity, isointense on T1 with central hyperintense foci in the left orbital apex spreading to compress the optic nerve | ||
| CT | Opacification of the OC | ||
| Argyrios Tzamalis 2020 [28] | Clinical presentation | A protruding relative afferent pupillary defect (RAPD) was noted on the left side | MRI |
| Dilated fundoscopy | Was not diagnostic for optic disc edema | ||
| MRI | Showed a hyper-dense cystic bilobed mass in the OC | ||
| Kyung Won Kwon 2019 [29] | Ophthalmologic examination | Failed to detect the OC opacification | MRI |
| MRI | Confirmed the presence of OC lesion with hypointense foci | ||
| Yong-Il Cheon 2014 [30] | MRI | Showed an oval-shaped mass in the OC | CT |
| Endoscopic examination | The nasal cavity was unremarkable | ||
| CT | Revealed a dense, oval-shaped mass in the OC, extending superolaterally around the orbital canal | ||
| Wencan Wu 2010 [31] | Ophthalmic examination | Failed to suggest OC opacification | MRI |
| Fundoscopy | Showed a light right optic disc | ||
| CT | Showed a dense mass in the OC | ||
| MRI | Established the presence of OC lesion that deteriorated the right optic nerve | ||
| Hitoshi Fukuda 2010 [32] | Ophthalmological examination | Visual acuity of 20/16, 20/32 in the right and left eyes | MRI |
| CT | Opacification of the OC bilaterally | ||
| MRI | An irregular cystic mass lesion in the OC surrounding the left optic canal | ||
| Tiago Fuzeta Eça 2018[33] | Ophthalmologic examination | Showed a complete loss of vision on the left eye | MRI |
| CT | Opacification of the OC | ||
| MRI | Revealed the lesion causing remodeling of the optic canal | ||
| Efrat Fleissig 2014 [34] | Clinical examination | Swelling and erythema of the right eyelid with afferent pupillary defect | MRI |
| CT | Opacification of the OC | ||
| MRI | Opacification of the OC | ||
| S Kashii 2016 [35] | MRI | An oval-shaped lesion in the OC which compressed the optic nerve | CT |
| CT | Opacification of the OC |
Note: OC: Onodi cell; VA: Visual acuity; CT: Computed tomography; MRI: Magnetic Resonance Imaging.
DownLoad:
CSV
| Article | Design | Setting | General characteristics | N (M/F) |
| Kiyotaka Kitagawa 2003 [2] | Case study | Departments of Ophthalmology and Otolaryngology-Head and Neck Surgery Toyama Medical and Pharmaceutical University, Toyama, Japan | Optic neuropathy caused by a compressed mucocele in an OC | 1 (1/0) |
| Yoichiro Fukuda 2006 [4] | Case study | Department of Otolaryngology-Head and Neck Surgery, Gunma University Graduate School of Medicine, Japan | Mucocele in an OC with simultaneous bilateral visual disturbance | 1 (1/0) |
| SA Lim 2008 [6] | Case study | Department of Ophthalmology, Tan Tock Seng Hospital, Singapore | Demonstrates the rare incidence of mucocele development in the osseous structures establishing the optic canal | 1 (1/0) |
| Kyung-Chul Yoon 2006 [8] | Case study | Department of Ophthalmology, Chonnam National University Medical School and Hospital, Gwangju, South Korea | Optic neuropathy caused by a mucocele in an OC | 1 (0/1) |
| Andrew Victores 2012 [11] | Case study | Department of Otolaryngology-Head and Neck Surgery, Baylor College of Medicine, Houston, Texas, USA | Recurrent OC mucocele: rare cause of two different ophthalmic complications | 1 (1/0) |
| T KLINK 2000 [13] | Case study | Department of Ophthalmology, Julius-Maximilians-University, Germany | Acute visual loss caused by an OC | 1 (1/ 0) |
| Song-Tar Toh 2007 [14] | Case study | Department of Otolaryngology-Head and Neck Surgery, Tan Tock Seng Hospital, Singapore | OC mucoceles are a rare cause of optic compressive neuropathy | 1 (1/ 0) |
| J. P. Nickerson 2011 [19] | Case study | Department of Otolaryngology, Johns Hopkins Medical Institute, Baltimore, MD, USA | OC mucocele causing acute vision loss | 1 (0/1) |
| Yoichi Ogata 1998 [20] | Case study | Department of Otolaryngology, Yamaguchi University School of Medicine, Ube, Japan | Optic neuropathy caused by an isolated mucocele in an OC | 1 (1/0) |
| JM Lee 2016 [25] | Case study | Department of Otolaryngology-Head and Neck Surgery, University of Toronto Faculty of Medicine, Toronto | OC mucocele in a 39-year-old woman, and a comprehensive review of the literature on this entity | 1 (0/1) |
| Connor Nathe 2018 [26] | Case study | Department of Ophthalmology, University of California, Irvine School of Medicine, Irvine, CA, USA | Complete orbital apex syndrome caused by an OC mucocele | 1 (0/1) |
| Vishal Annaji Chafale 2015 [27] | Case study | Bangor Institution of Neurosciences, Kolkata, India | Retrobulbar optic neuropathy secondary to isolated sphenoid sinus disease | 1 (0/1) |
| Argyrios Tzamalis 2020 [28] | Case study | University of Thessaloniki, Greece | OC associated optic neuropathy | 1(1/0) |
| Kyung Won Kwon 2019 [29] | Case study | Department of Otorhinolaryngology-Head and Neck Surgery, National Medical Center, Seoul | OC mucocele causing isolated trochlear nerve palsy | 1 (1/0) |
| Yong-Il Cheon 2014 [30] | Case study | Department of Otorhinolaryngology and Biomedical Research Institute, San, Republic of Korea | A fungal ball within OC mucocele causing visual loss nerve palsy | 1 (1/0) |
| Wencan Wu 2010 [31] | Case study | Eye Hospital of Wenzhou Medical College, China | Recovery of visual function in a patient with an OC mucocele causing compressive optic neuropathy | 1 (1/0) |
| Hitoshi Fukuda 2010 [32] | Case study | Department of Neurosurgery, Hyogo | Small OC mucocele causing chronic optic neuropathy | 1 (0/1) |
| Tiago Fuzeta Eça 2018 [33] | Case study | Otolaryngology Department, Centro Hospitalar Lisboa Norte, Hospital Santa Maria, Portugal | Surgical drainage plus optic nerve decompression in acute optic neuropathy by an OC mucocele | 1 (1/0) |
| Efrat Fleissig 2014 [34] | Case study | Faculty of Medicine, Tel Aviv University | Blinding orbital apex syndrome | 1 (0/1) |
| S Kashii 2016 [35] | Case study | Dept. of Ophthalmology, Osaka Red Cross Hospital, Osaka, Osaka, Japan, | Acute visual loss caused by an OC mucocele | 1 (1/0) |
| 20 (13/7) |
| Article | Condition | Symptoms | Risk factors |
| Kiyotaka Kitagawa 2003 [2] | OC mucocele | Suddenly complained of headache and decreased vision in the left eye | Underwent cataract surgery |
| Yoichiro Fukuda 2006 [4] | OC mucocele | Sudden frontal headache and two-sided vision deterioration | Noncontributory except for glaucoma |
| SA Lim 2008 [6] | Optic neuritis because of mucocele of OC | Sudden nasal ache with the deterioration of the vision in his right eye and inability to differentiate colors | Nasopharyngeal carcinoma diagnosed and treated with radiotherapy; acute angle-closure glaucoma affecting his left eye two years ago |
| Kyung-Chul Yoon 2006 [8] | OC mucocele compressing the optic nerve mechanically | Acute loss of vision in the right eye | No risk factors |
| Andrew Victores 2012 [11] | Pacification of the right OC carefully bordering the right optic nerve | Blurred vision after the abrupt loss of vision in the right eye with eye pain and headache | CRS |
| T KLINK 2000 [13] | Optic neuropathy caused by an isolated mucocele in OC | Acute visual deterioration in the right eye and a central scotoma, “black dots” appeared in his central visual field | Medical and surgical history was unremarkable |
| Song-Tar Toh 2007 [14] | OC mucocele | Sudden onset of clouding (blurred) of vision | (1) nasopharyngeal carcinoma, 8 years earlier; (2) functional endoscopic sinus surgery 7 years earlier; and (3) chronic angle-closure glaucoma in his left eye, with decreased visual acuity for 1 year |
| J. P. Nickerson 2011 [19] | OC causing expansion of the bone anterior and medial to the optic canal | Unusual sensation in the eye with complete loss of vision | Left orbital fracture at the age of 13 years |
| Yoichi Ogata 1998 [20] | Rhinogenic optic neuropathy arising from an OC | Impaired visual acuity and blurred vision in the left eye. Sudden blindness of the left eye | Medical and surgical history was unremarkable |
| JM Lee 2016 [25] | OC mucocele | Pain with a progressive deterioration in visual perception in her left eye | Previous endoscopic sinus surgery |
| Connor Nathe 2018 [26] | Unilateral orbital apex syndrome due to an OC mucocele. | Progressive vision loss in her right eye; seeing floaters which progressed to total vision loss. No pain or trauma | Age-related macular degeneration and bilateral pseudophakia |
| Vishal Annaji Chafale 2015 [27] | Retrobulbar optic neuropathy | Acute visual worsening in the left eye subsequent frontal headache with no pain in her eye | Medical and surgical history was unremarkable |
| Argyrios Tzamalis 2020 [28] | OC mucocele associated with optic neuropathy | Sudden worsening of vision in the patient's left eye | Medical and surgical history was unremarkable |
| Kyung Won Kwon 2019 [29] | Trochlear nerve palsy due to an isolated mucocele in the left OC | Double vision | Medical and surgical history was unremarkable |
| Yong-Il Cheon 2014 [30] | Oval-shaped mass in the OC, spreading superolaterally around the left orbital apex | Headache and blindness of the left eye | No history of nasal surgery brain infarction for 5 years |
| Wencan Wu 2010 [31] | Compressive optic neuropathy due to an OC mucocele | Sudden decrease in right VA. Loss of vision associated with eye pain and headache | Medical and surgical history was unremarkable |
| Hitoshi Fukuda 2010 [32] | Onodi cell mucocele with long-term history | Gradual loss of vision over the past year | No risk factors |
| Tiago Fuzeta Eça 2018 [33] | Mucocele/pyocele in an OC | Progressive loss of vision in his left eye. No nasal symptoms | Medical and surgical history was unremarkable |
| Efrat Fleissig 2014 [34] | Blinding orbital apex syndrome | Loss of vision in her right eye accompanied by pain during eye movement | CRS |
| S Kashii 2016 [35] | OC mucocele | Periorbital pain around the right eye. Sudden blindness | Past medical history was notable for sudden blindness |
| Article | Time between symptoms and treatment | Treatment | Result |
| Kiyotaka Kitagawa 2003 [2] | 7 days | Functional endoscopic sinus surgery | VA improved eight days after surgery and complete recovery was achieved after six months |
| Yoichiro Fukuda 2006 [4] | NA | IV corticosteroid: methylprednisolone | VA improved but the expected recovery was not achieved |
| NA | Functional endoscopic sinus surgery | VA was restored | |
| SA Lim 2008 [6] | NA | Functional endoscopic sinus surgery | After a few days VA improved |
| Kyung-Chul Yoon 2006 [8] | 2 days | Functional endoscopic sinus surgery, followed by IV corticosteroids | Six months after treatment, the vision improved; however, mild temporal visual field defects remained |
| Andrew Victores 2012 [11] | 3 days | Transnasal endoscopic sphenoethmoidectomy | No improvement in VA |
| 6 years, the symptoms occurred again for two days | Transnasal endoscopic sphenoethmoidectomy | One week later, the right eye pain had resolved, but the vision loss persisted | |
| T KLINK 2000 [13] | 2 weeks | Functional endoscopic sinus surgery | VA improved nine days after surgery and central scotoma was reduced to small scotoma |
| Song-Tar Toh 2007 [14] | NA | IV antibiotic and corticosteroids | VA improved |
| 1 week | Functional endoscopic sinus surgery | VA improved one week after surgery | |
| J. P. Nickerson 2011 [19] | 5 weeks | Functional endoscopic sinus surgery | No improvement in VA |
| Yoichi Ogata 1998 [20] | NA | Corticosteroids | After four days, the symptoms worsened and blindness occurred |
| 2 months | Functional endoscopic sinus surgery | VA improved one week after surgery | |
| JM Lee 2016 [25] | 1 week | Functional endoscopic sinus surgery | VA improved one hour after surgery. In the first hours after surgery, the patient regained her color vision |
| Connor Nathe 2018 [26] | 16 days | Functional endoscopic sinus surgery with optic nerve decompression | VA improved one day after surgery, with improved ocular motility in the left gaze. One week after surgery, VA was 20/20 with the improvement of extraocular movements in all gazes |
| Vishal Annaji Chafale 2015 [27] | 2 months | The patient refused to undergo endoscopic surgery and the patient's condition was managed pharmacologically with antibiotics, mucolytics, and decongestants | VA improved one month after surgery |
| Argyrios Tzamalis 2020 [28] | 18 hours | Transnasal endoscopic sphenoidectomy. Postoperatively, the patient was set on IV antibiotic and corticosteroids | Surgery failed to treat the deterioration in light perception, which remained unchanged through the next five days after surgery |
| Kyung Won Kwon 2019 [29] | 3 days | Functional endoscopic sinus surgery, followed by IV corticosteroids | After two weeks, diplopia was not improved. After four months, fourth nerve palsy had completely improved |
| Yong-Il Cheon 201 4[30] | NA | Transnasal endoscopic sphenoethmoidectomy | No improvement in VA |
| Wencan Wu 2010 [31] | 2 weeks | IV antibiotic and corticosteroids | After five days, the vision in the right eye improved and ocular pain and the headache disappeared |
| 5 weeks | Functional endoscopic sinus surgery | VA improved five days after surgery | |
| Hitoshi Fukuda 2010 [32] | NA | Pterional-transcranial epidural approach | After surgery, the decompression of the optic canal was complete |
| Tiago Fuzeta Eça 2018 [33] | 2 days | Functional endoscopic sinus surgery | After four days, the visual acuity improved, and after six months, the visual loss reverted completely |
| Efrat Fleissig 2014 [34] | one day | IV corticosteroids: methylprednisolone (1 mg/kg per day) | A few hours later, the patient had worse symptoms including diplopia, swelling in the eyelid, VA deterioration |
| on the same day | Functional endoscopic sinus surgery | Eye movement was restored after surgery; however, no improvement in VA, and no light perception were observed | |
| S Kashii 2016 [35] | NA | The patient refused surgical interventions |
| Article | Diagnostic tools | Efficacy | The tool success to confirm the condition |
| Kiyotaka Kitagawa 2003 [2] | Ophthalmic examination | Unremarkable | MRI |
| CT | Opacification of the OC | ||
| MRI | Showed an oval-shaped lesion related to the OC that may compress the left optic nerve | ||
| Yoichiro Fukuda 2006 [4] | Ophthalmic examination | Visual function was inadequate to light acuity in both eyes | CT |
| CT | Opacification of the OC | ||
| SA Lim 2008 [6] | Ophthalmic examination | Corrected VA was 6/30 on the affected right eye and 6/12 on the left | MRI |
| MRI | Revealed an opacification of OCs indicating a mucocele | ||
| Kyung-Chul Yoon 2006 [8] | Ophthalmic examination | Unremarkable | MRI |
| CT | Opacification of the OC | ||
| MRI | Revealed a mass with signal intensity in the right OCl compressing the right optic nerve | ||
| Andrew Victores 2012 [11] | CT and MRI | Opacification of the OC | MRI |
| T KLINK 2000 [13] | Clinical presentation | Unremarkable | MRI |
| MRI | Showed a kidney bean-shaped mass in the right orbital apex, which compressed the optic nerve | ||
| Song-Tar Toh 2007 [14] | Ophthalmic examination | Failed to detect the OC opacification | CT |
| CT | Revealed a mucocele in the OC | ||
| J. P. Nickerson 2011 [19] | CT | Confirmed extension of the bone anterior to the optic canal as a result of an OC with low-density material | MRI |
| MRI | Established a marginated signal extending from the OC towards the orbital canal | ||
| Yoichi Ogata 1998 [20] | CT | Failed to detect the OC opacification | MRI |
| An axial CT with an 8-mm thickness | Showed no abnormal findings | ||
| MRI | Showed a small high-intensity area in the left OC | ||
| JM Lee 2016 [25] | Ophthalmological examination | Edema of the left optic disc | CT |
| MRI | A suspected mucocele in the left OC | ||
| CT | Opacification of the OC | ||
| Connor Nathe 2018 [26] | The patient had no light perception (NLP) in the right eye. VA in the left eye was 20/50, which was later confirmed to be her baseline VA in both eyes | MRI | |
| CT | Opacification of the OC | ||
| MRI | Demonstrated an opacified right sphenoethmoidal air cell, which extended to the anterior clinoid process close to the optic nerve | ||
| Vishal Annaji Chafale 2015 [27] | Clinical examination | Unremarkable | CT |
| MRI | T2-weighted images presented high signal intensity, isointense on T1 with central hyperintense foci in the left orbital apex spreading to compress the optic nerve | ||
| CT | Opacification of the OC | ||
| Argyrios Tzamalis 2020 [28] | Clinical presentation | A protruding relative afferent pupillary defect (RAPD) was noted on the left side | MRI |
| Dilated fundoscopy | Was not diagnostic for optic disc edema | ||
| MRI | Showed a hyper-dense cystic bilobed mass in the OC | ||
| Kyung Won Kwon 2019 [29] | Ophthalmologic examination | Failed to detect the OC opacification | MRI |
| MRI | Confirmed the presence of OC lesion with hypointense foci | ||
| Yong-Il Cheon 2014 [30] | MRI | Showed an oval-shaped mass in the OC | CT |
| Endoscopic examination | The nasal cavity was unremarkable | ||
| CT | Revealed a dense, oval-shaped mass in the OC, extending superolaterally around the orbital canal | ||
| Wencan Wu 2010 [31] | Ophthalmic examination | Failed to suggest OC opacification | MRI |
| Fundoscopy | Showed a light right optic disc | ||
| CT | Showed a dense mass in the OC | ||
| MRI | Established the presence of OC lesion that deteriorated the right optic nerve | ||
| Hitoshi Fukuda 2010 [32] | Ophthalmological examination | Visual acuity of 20/16, 20/32 in the right and left eyes | MRI |
| CT | Opacification of the OC bilaterally | ||
| MRI | An irregular cystic mass lesion in the OC surrounding the left optic canal | ||
| Tiago Fuzeta Eça 2018[33] | Ophthalmologic examination | Showed a complete loss of vision on the left eye | MRI |
| CT | Opacification of the OC | ||
| MRI | Revealed the lesion causing remodeling of the optic canal | ||
| Efrat Fleissig 2014 [34] | Clinical examination | Swelling and erythema of the right eyelid with afferent pupillary defect | MRI |
| CT | Opacification of the OC | ||
| MRI | Opacification of the OC | ||
| S Kashii 2016 [35] | MRI | An oval-shaped lesion in the OC which compressed the optic nerve | CT |
| CT | Opacification of the OC |
