In order to improve the accuracy of liquid level detection in intravenous left auxiliary vein infusion and reduce the pain of patients with blood returning from intravenous infusion, we propose a deep learning based liquid level detection model of infusion levels to facilitate this operation.
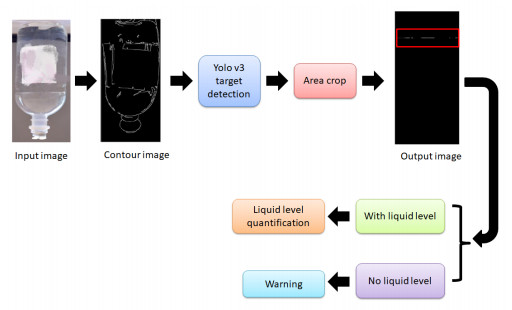
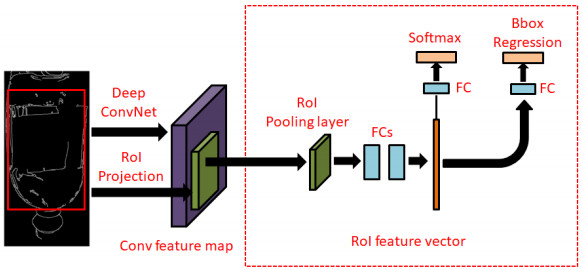
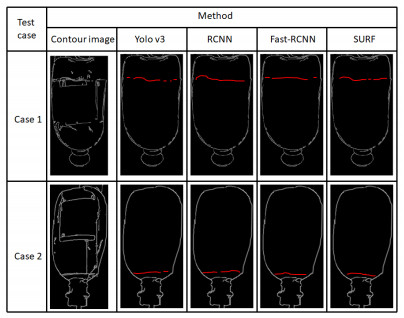
We implemented a Yolo v3-based detection model of infusion level images in intravenous infusion, and at the same time, compare it with SURF image processing technique, RCNN, and Fast-RCNN methods.
The model in this paper is better than the comparison algorithm in Intersection over Union (IoU), precision, recall and test time. The liquid level detection model based on Yolo v3 has a precision of 0.9768, a recall rate of 0.9688, an IoU of 0.8943, and a test time of 2.9 s.
The experimental results prove that the liquid level detection method based on deep learning has the characteristics of high accuracy and good real-time performance. This method can play a certain auxiliary role in the hospital environment and improve work efficiency of medical workers.
Citation: Zeyong Huang, Yuhong Li, Tingting Zhao, Peng Ying, Ying Fan, Jun Li. Infusion port level detection for intravenous infusion based on Yolo v3 neural network[J]. Mathematical Biosciences and Engineering, 2021, 18(4): 3491-3501. doi: 10.3934/mbe.2021175
In order to improve the accuracy of liquid level detection in intravenous left auxiliary vein infusion and reduce the pain of patients with blood returning from intravenous infusion, we propose a deep learning based liquid level detection model of infusion levels to facilitate this operation.
We implemented a Yolo v3-based detection model of infusion level images in intravenous infusion, and at the same time, compare it with SURF image processing technique, RCNN, and Fast-RCNN methods.
The model in this paper is better than the comparison algorithm in Intersection over Union (IoU), precision, recall and test time. The liquid level detection model based on Yolo v3 has a precision of 0.9768, a recall rate of 0.9688, an IoU of 0.8943, and a test time of 2.9 s.
The experimental results prove that the liquid level detection method based on deep learning has the characteristics of high accuracy and good real-time performance. This method can play a certain auxiliary role in the hospital environment and improve work efficiency of medical workers.

| [1] | M. Jordinson, A. J. Fitzgerald, R. A. Goodlad, A. Brynes, G. Grant, M. Pignatelli, et al., Systemic effect of peanut agglutinin following intravenous infusion into rats, Aliment. Pharm. Ther., 14 (2000), 835. |
| [2] | J. Nemunaitis, C. Cunningham, A. Buchanan, A. Blackburn, G. Edelman, P. Maples, et al., Intravenous infusion of a replication-selective adenovirus (ONYX-015) in cancer patients: safety, feasibility and biological activity, Gene Ther., 8 (2001), 746-759. |
| [3] | D. Pallares, M. R. Testelli, B. L. Fishleder, A. Bisteni, G. A. Medrano, C. Friedland, et al., Effects of an intravenous infusion of a potassium-glucose-insulin solution on the electrocardiographic signs of myocardial infarction, J. Am. Coll. Cardiol., 5 (1965), 166-181. |
| [4] | K. B. Degn, B. Brock, C. B. Juhl, C. B. Djurhuus, J. Grubert, D. Kim, et al., Effect of intravenous infusion of exenatide (synthetic exendin-4) on glucose-dependent insulin secretion and counterregulation during hypoglycemia, Diabetes, 53 (2004), 2397-2403. |
| [5] | E. Raymond, J. Alexandre, S. Faivre, K. Vera, E. Materman, J. Boni, et al., Safety and pharmacokinetics of escalated doses of weekly intravenous infusion of CCI-779, a novel mTOR inhibitor, in patients with cancer, J. Clin. Oncol., 22 (2004), 2336-2347. |
| [6] | B. T. Tedner, H. S. Jacobson, D. Linnarsson, L. E. Lins, Impedance fluid volume monitoring during intravenous infusion in healthy subjects, Acute Care, 10 (1984), 200-206. |
| [7] | D. B. Goodie, J. H. Philip, An analysis of the effect of venous resistance on the performance of gravity-fed intravenous infusion systems, J. Clin. Comput., 75 (1994), 127-132. |
| [8] | J. W. Cui, H. Zhang, Design of intravenous infusion monitoring and alarm system based on wireless communication technology, IEEE Int. Conf. Mechatron. Automat., 2011. |
| [9] | Y. Zhang, S. F. Zhang, Y. Ji, G. X. Wu, Wireless sensor network-enabled intravenous infusion monitoring, IET Wirel. Sens. Syst., 124 (2011), 107-112. |
| [10] |
Y. C. Kim, S. F. Ahmad, H. D. Kim, Intravenous infusion monitoring sensor based on longitudinal electric field proximity sensing technique, J. Sens. Sci. Technol., 26 (2017), 101-106. doi: 10.5369/JSST.2017.26.2.101

|
| [11] | S. M. Bhavnani, S. L. Preston, Monitoring of intravenous quinidine infusion in the treatment of Plasmodium falciparum malaria, Ann. Pharmacotherl. 29 (1995), 33-35. |
| [12] |
G. Rudnitsky, K. D. Miller, T. Padua, T. L. Stull, Continuous-infusion quinidine gluconate for treating children with severe plasmodium falciparum malaria, J. Infect. Dis., 155 (1987), 1040-1043. doi: 10.1093/infdis/155.5.1040
|
| [13] |
D. B. Goodie, J. H. Philip, An analysis of the effect of venous resistance on the performance of gravity-fed intravenous infusion systems, J. Clin. Monit. Comput., 10 (1994), 222-228. doi: 10.1007/BF02899506
|
| [14] | A. Meess, Platelet transfusion in chemotherapy patients: comparison of the effect of intravenous infusion pumps versus gravity transfusion, Brit. J. Biomed. Sci., 157 (2015), 213-220. |
| [15] | N. Simon, B. Décaudin, D. Lannoy, M. F. Odou, M. D. Broucker, C. Barthélémy, et al., Impact of infusion method on amikacin serum levels in humans, Pulm. Pharmacol. Ther., 23 (2010), 324-326. |
| [16] | X. Gao, D. Ge, Z. Chen, The research on autopilot system based on lightweight Yolo-V3 target detection algorithm, J. Phys. Conf. Ser., 1486 (2020), 032028. |
| [17] | T. Q. Vinh, N. T. N. Anh, Real-time face mask detector using Yolo-V3 algorithm and haar cascade classifier, Advanced Comput. Appl. (ACOMP) Int. Conf., (2020), 146-149. |
| [18] | P. Bao, L. Zhang, X. Wu, Canny edge detection enhancement by scale multiplication, IEEE T. Pattern Anal., 45 (2005), 78-82. |
| [19] |
Q. Xu, S. Varadarajan, C. Chakrabarti, L. J. Karam, A distributed canny edge detector: algorithm and FPGA implementation, IEEE T. Image Process., 23 (2014), 2944-2960. doi: 10.1109/TIP.2014.2311656
|
| [20] | M. Amiri, F. M. Siddiqui, C. Kelly, R. Woods, K. Rafferty, B. Bardak., FPGA-based soft-core processors for image processing applications, J. Signal Process. Syst., 87 (2017), 1-18. |
| [21] | P. A. Zuidema, E. Jongejans, P. D. Chien, H. J. During, F. Schieving, Integral projection models for trees: a new parameterization method and a validation of model output, J. Ecol., 55 (2010), 66-72. |
| [22] |
C. Sert, A. Beskok, Spectral element formulations on non-conforming grids: a comparative study of pointwise matching and integral projection methods, J. Comput. Phys., 211 (2006), 300-325. doi: 10.1016/j.jcp.2005.05.019
|
| [23] | M. Ju, J. Luo, Z. Wang, H. Luo. Adaptive feature fusion with attention mechanism for multi-scale target detection, Neural. Comput. Appl., 7 (2020), 333-338. |
| [24] | X. Mou, X. Chen, J. Guan, W. Zhou, N. Liu, Y. Dong, Clutter suppression and marine target detection for radar images based on INet, J. Radars, 9 (2020), 640-653. |
| [25] | X. Wu, B. Xu, X. Chen, C. Jin, Visual target detection based on Yolo network structure, Boletín Técnico, 55 (2017), 6-13. |
| [26] | H. Chen, L. Zhang, J. Ma, J. Zhang, Target heat-map network: an end-to-end deep network for target detection in remote sensing images, Neurocomputing, 331 (2018), 375-387. |
| [27] | P. Adarsh, P. Rathi, M. Kumar, Yolo v3-tiny: object detection and recognition using one stage improved model, in 2020 6th International Conference on Advanced Computing and Communication Systems (ICACCS), (2020), 68-694. |
| [28] | R. Girshick, J. Donahue, T. Darrell, J. Malik, Region-based convolutional networks for accurate object detection and segmentation, IEEE T. Pattern Anal., 38 (2015), 142-158. |
| [29] | L. Quan, D. Pei, B. Wang, W. Ruan, Research on human target recognition algorithm of home service robot based on fast-RCNN, in 2017 10th International Conference on Intelligent Computation Technology and Automation (ICICTA), (2017), 369-373. |
| [30] | R. Pan, W. Sun, Deep learning target detection based on pre-segmentation and regression, Prec. Eng., (2005), 221-227. |
| [31] | A. K. Rangarajan, R. Purushothaman, Disease classification in eggplant using pre-trained VGG16 and MSVM, Rep-UK, 10 (2020), 2322. |
| [32] |
C. D. Cunha, M. do Rosário, A. S. Rosado, S. G. F. Leite, Serratia SVGG16: a promising biosurfactant producer isolated from tropical soil during growth with ethanol-blended gasoline, Process. Biochem., 39 (2004), 2277-2282. doi: 10.1016/j.procbio.2003.11.027
|
| [33] | H. Bay, A. Ess, T. Tuytelaars, L. V. Gool, Speeded-up robust features (SURF), Comput. Vis Image Understanding, 110 (2008), 346-359. |
| [34] | H. Bay, T. Tuytelaars, L. V. Gool, SURF: Speeded Up Robust Features, in European Conference on Computer Vision, Springer, Berlin, Heidelberg, 2006. |
Figures(7) / Tables(2)

Zeyong Huang, Yuhong Li, Tingting Zhao, Peng Ying, Ying Fan, Jun Li. Infusion port level detection for intravenous infusion based on Yolo v3 neural network[J]. Mathematical Biosciences and Engineering, 2021, 18(4): 3491-3501. doi: 10.3934/mbe.2021175







 DownLoad:
DownLoad: