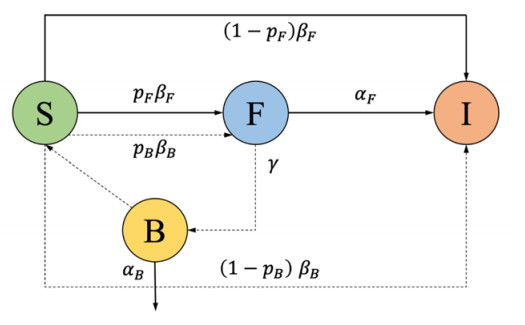
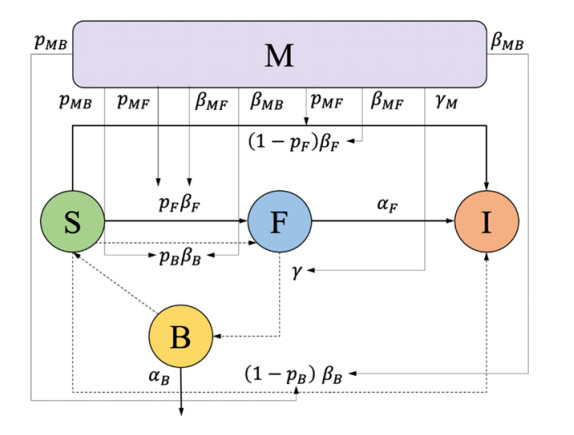
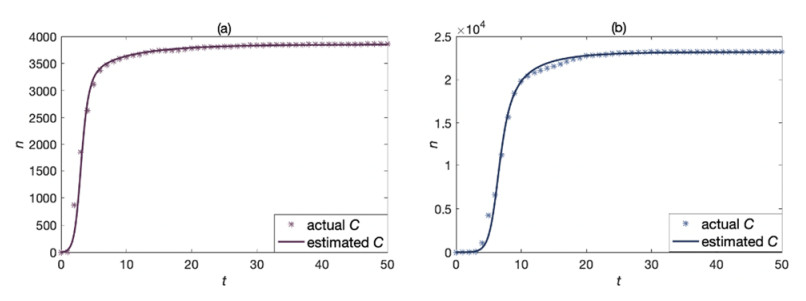
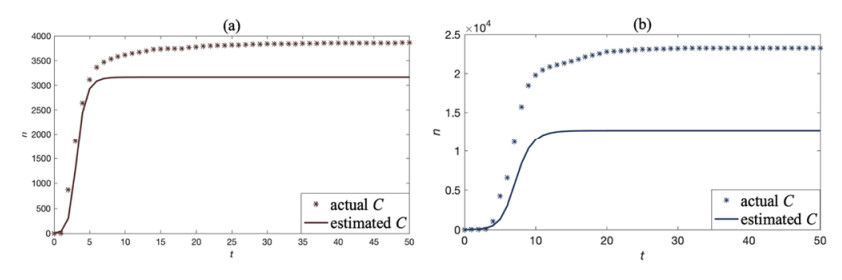
A significant distinction between the COVID-19 pandemic and previous pandemics is the significant role of social media platforms in shaping public adherence to non-pharmaceutical interventions and vaccine acceptance. However, with the recurrence of the epidemic, the conflict between epidemic prevention and production recovery has become increasingly prominent on social media. To help design effective communication strategies to guide public opinion, we propose a susceptible-forwarding-immune pseudo-environment (SFI-PE) dynamic model for understanding the environment with direct and indirect propagation behaviors. Then, we introduce a system with external interventions for direct and indirect propagation behaviors, termed the macro-controlled SFI-PE (M-SFI-PE) model. Based on the numerical analyses that were performed using actual data from the Chinese Sina microblogging platform, the data fitting results prove our models' effectiveness. The research grasps the law of the new information propagation paradigm, and our work bridges the gap between reality and theory in information interventions.
Citation: Fulian Yin, Xinyi Tang, Tongyu Liang, Yanjing Huang, Jianhong Wu. External intervention model with direct and indirect propagation behaviors on social media platforms[J]. Mathematical Biosciences and Engineering, 2022, 19(11): 11380-11398. doi: 10.3934/mbe.2022530
A significant distinction between the COVID-19 pandemic and previous pandemics is the significant role of social media platforms in shaping public adherence to non-pharmaceutical interventions and vaccine acceptance. However, with the recurrence of the epidemic, the conflict between epidemic prevention and production recovery has become increasingly prominent on social media. To help design effective communication strategies to guide public opinion, we propose a susceptible-forwarding-immune pseudo-environment (SFI-PE) dynamic model for understanding the environment with direct and indirect propagation behaviors. Then, we introduce a system with external interventions for direct and indirect propagation behaviors, termed the macro-controlled SFI-PE (M-SFI-PE) model. Based on the numerical analyses that were performed using actual data from the Chinese Sina microblogging platform, the data fitting results prove our models' effectiveness. The research grasps the law of the new information propagation paradigm, and our work bridges the gap between reality and theory in information interventions.

| [1] |
C. Iwendi, S. Mohan, S. Khan, E. Ibeke, A. Ahmadian, T. Ciano, COVID-19 fake news sentiment analysis, Comput. Electr. Eng., 101 (2022), 107967. https://doi.org/10.1016/j.compeleceng.2022.107967 doi: 10.1016/j.compeleceng.2022.107967

|
| [2] | T. H. Davenport, Information Ecology: Mastering the Information and Knowledge Environment, Oxford University Press, Oxford, 1977. |
| [3] | W. Lippmann, M. Curtis, Public Opinion, 1st Edition, Taylor & Francis, New York, 2017. https://doi.org/10.4324/9781315127736 |
| [4] |
C. Iwendi, C. G. Y. Huescas, C. Chakraborty, S. Mohan, COVID-19 health analysis and prediction using machine learning algorithms for Mexico and Brazil patients, J. Exp. Theor. Artif. Intell., 2022 (2022), 1–21. https://doi.org/10.1080/0952813X.2022.2058097 doi: 10.1080/0952813X.2022.2058097
|
| [5] |
M. Bibi, W. A. Abbasi, W. Aziz, S. Khalil, M. Uddin, C. Iwendi, et al., A novel unsupervised ensemble framework using concept-based linguistic methods and machine learning for twitter sentiment analysis, Pattern Recognit. Lett., 158 (2022), 80–86. https://doi.org/10.1016/j.patrec.2022.04.004 doi: 10.1016/j.patrec.2022.04.004
|
| [6] |
X. X. Zhao, J. Z. Wang, Dynamical behaviors of rumor spreading model with control measures, Abstr. Appl. Anal., 2014 (2014). https://doi.org/10.1155/2014/247359 doi: 10.1155/2014/247359
|
| [7] |
J. P. Xu, M. X. Zhang, J. N. Ni, A coupled model for government communication and rumor spreading in emergencies, Adv. Differ. Equations, 208 (2016), 1–15. https://doi.org/10.1186/s13662-016-0932-1 doi: 10.1186/s13662-016-0932-1
|
| [8] |
Y. Zhang, J. P. Xu, Y. Wu, A rumor control competition model considering intervention of the official rumor-refuting information, Int. J. Mod. Phys. C, 31 (2020), 2050123. https://doi.org/10.1142/S0129183120501235 doi: 10.1142/S0129183120501235
|
| [9] |
Y. M. Zhang, Y. Y. Su, W. G. Li, H. O. Liu, Rumor and authoritative information propagation model considering super spreading in complex social networks, Physica A, 506 (2018), 395–411. https://doi.org/10.1016/j.physa.2018.04.082 doi: 10.1016/j.physa.2018.04.082
|
| [10] |
L. A. Huo, P. Q. Huang, X. Fang, An interplay model for authorities actions and rumor spreading in emergency event, Physica A, 390 (2011), 3267–3274. https://doi.org/10.1016/j.physa.2011.05.008 doi: 10.1016/j.physa.2011.05.008
|
| [11] |
H. J. Paek, T. Hove, Mediating and moderating roles of trust in government in effective risk rumor management: A test case of radiation‐contaminated seafood in South Korea, Risk Anal., 39 (2019), 2653–2667. https://doi.org/10.1111/risa.13377 doi: 10.1111/risa.13377
|
| [12] |
F. L. Yin, M. Q. Ji, Z. L. Yang, Z. L. Wu, X. Y. Xia, T. T. Xing, et al., Exploring the determinants of global vaccination campaigns to combat COVID-19, Humanit. Social Sci. Commun., 9 (2022), 1–13. https://doi.org/10.1057/s41599-022-01106-7 doi: 10.1057/s41599-022-01106-7
|
| [13] |
F. H. Chen, A susceptible-infected epidemic model with voluntary vaccinations, J. Math. Biol., 53 (2006), 253–272. https://doi.org/10.1007/s00285-006-0006-1 doi: 10.1007/s00285-006-0006-1
|
| [14] |
Z. H. Lu, S. J. Gao, L. S. Chen, Analysis of an SI epidemic model with nonlinear transmission and stage structure, Acta Math. Sci., 23 (2003), 440–446. https://doi.org/10.1016/S0252-9602(17)30486-1 doi: 10.1016/S0252-9602(17)30486-1
|
| [15] |
M. Y. Li, J. S. Muldowney, Global stability for the SEIR model in epidemiology, Math. Biosci., 125 (1995), 155–164. https://doi.org/10.1016/0025-5564(95)92756-5 doi: 10.1016/0025-5564(95)92756-5
|
| [16] |
W. O. Kermack, A. G. McKendrick, Contributions to the mathematical theory of epidemics-Ⅰ, 1927, Bull. Math. Biol., 53 (1991), 33–55. https://doi.org/10.1007/bf02464423 doi: 10.1007/bf02464423
|
| [17] |
L. Stone, B. Shulgin, Z, Agur, Theoretical examination of the pulse vaccination policy in the SIR epidemic model, Math. Comput. Modell., 31 (2000), 207–215. https://doi.org/10.1016/S0895-7177(00)00040-6 doi: 10.1016/S0895-7177(00)00040-6
|
| [18] |
C. Y. Xia, S. W. Sun, F. Rao, J. Q. Sun, J. S. Wang, Z. Q. Chen, SIS model of epidemic spreading on dynamical networks with community, Front. Comput. Sci. Chin., 3 (2009), 361–365. https://doi.org/10.1007/s11704-009-0057-8 doi: 10.1007/s11704-009-0057-8
|
| [19] |
A. Lahrouz, L. Omari, D. Kiouach, A. Belmaâtic, Complete global stability for an SIRS epidemic model with generalized non-linear incidence and vaccination, Appl. Math. Comput., 218 (2012), 6519–6525. https://doi.org/10.1016/j.amc.2011.12.024 doi: 10.1016/j.amc.2011.12.024
|
| [20] |
T. Berge, J. M. S. Lubuma, G. M. Moremedi, N. Morris, R. Kondera-Shava, A simple mathematical model for Ebola in Africa, J. Biol. Dyn., 11 (2017), 42–74. https://doi.org/10.1080/17513758.2016.1229817 doi: 10.1080/17513758.2016.1229817
|
| [21] |
M. Kumar, S. Abbas, Age-structured SIR model for the spread of infectious diseases through indirect contacts, Mediterr. J. Math., 19 (2022), 1–18. https://doi.org/10.1007/s00009-021-01925-z doi: 10.1007/s00009-021-01925-z
|
| [22] |
J. F. David, S. A. Iyaniwura, M. J. Ward, F. Brauer, A novel approach to modelling the spatial spread of airborne diseases: an epidemic model with indirect transmission, Math. Biosci. Eng., 17 (2020), 3294–3328. https://doi.org/10.3934/mbe.2020188 doi: 10.3934/mbe.2020188
|
| [23] |
J. F. David, S. A. Iyaniwura, P. Yuan, Y. Tan, J. Kong, H. P. Zhu, Modeling the potential impact of indirect transmission on COVID-19 epidemic, MedRxiv, 2021 (2021). https://doi.org/10.1101/2021.01.28.20181040 doi: 10.1101/2021.01.28.20181040
|
| [24] |
M. H. Cortez, J. S. Weitz, Distinguishing between indirect and direct modes of transmission using epidemiological time series, Am. Nat., 181 (2013), E43–E52. https://doi.org/10.1086/668826 doi: 10.1086/668826
|
| [25] |
O. Vasilyeva, T. Oraby, F. Lutscher, Aggregation and environmental transmission in chronic wasting disease, Math. Biosci. Eng., 12 (2015), 209. https://doi.org/10.3934/mbe.2015.12.209 doi: 10.3934/mbe.2015.12.209
|
| [26] |
F. L. Yin, X. Y. Shao, J. H. Wu, Nearcasting forwarding behaviors and information propagation in Chinese Sina-Microblog, Math. Biosci. Eng., 16 (2019), 5380–5394. https://doi.org/10.3934/mbe.2019268 doi: 10.3934/mbe.2019268
|
| [27] |
Y. Yu, J. M. Liu, J. D. Ren, C. Y. Xiao, Stability analysis and optimal control of a rumor propagation model based on two communication modes: friends and marketing account pushing, Math. Biosci. Eng., 19 (2022), 4407–4428. https://doi.org/10.3934/mbe.2022204 doi: 10.3934/mbe.2022204
|
| [28] |
X. M. Feng, X. Huo, B. Tang, S. Y. Tang, K. Wang, J. H. Wu, Modelling and analyzing virus mutation dynamics of chikungunya outbreaks, Sci. Rep., 9 (2019), 1–15. https://doi.org/10.1038/s41598-019-38792-4 doi: 10.1038/s41598-019-38792-4
|
| [29] |
A. D. Myttenaere, B. Golden, B. L. Grand, F. Rossi, Mean absolute percentage error for regression models, Neurocomputing, 192 (2016), 38–48. https://doi.org/10.1016/j.neucom.2015.12.114 doi: 10.1016/j.neucom.2015.12.114
|
| [30] |
U. L. Abbas, R. M. Anderson, J. W. Mellors, Potential impact of antiretroviral chemoprophylaxis on HIV-1 transmission in resource-limited settings, PLOS ONE, 2 (2007), e875. https://doi.org/10.1371/journal.pone.0000875 doi: 10.1371/journal.pone.0000875
|
Figures(8) / Tables(5)

Fulian Yin, Xinyi Tang, Tongyu Liang, Yanjing Huang, Jianhong Wu. External intervention model with direct and indirect propagation behaviors on social media platforms[J]. Mathematical Biosciences and Engineering, 2022, 19(11): 11380-11398. doi: 10.3934/mbe.2022530







 DownLoad:
DownLoad: