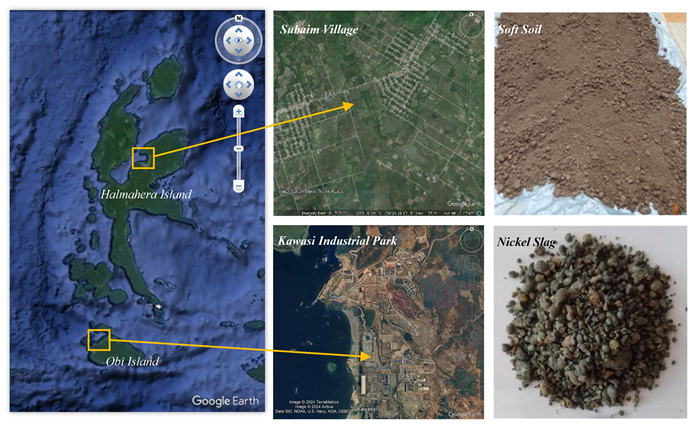
Chemical stabilization is considered a more effective and efficient method for improving soft soil in road foundation construction. Nickel slag, a byproduct of the nickel industry, has the potential to be developed as an environmentally friendly pozzolanic material for soft soil improvement. Our previous research has shown that nickel slag enhances the mechanical properties of high-plasticity organic soil but fails to meet road foundation standards. As such, additional materials are needed to achieve the required specifications. This study aims to analyze the effect of adding aluminum hydroxide [Al(OH)3] to soil stabilized with nickel slag. The addition of Al(OH)3 is based on weight ratios of nickel slag at 1.5, 2.5, and 3.5. The effectiveness of adding nickel slag was assessed based on the unconfined compressive strength (qu) of the mixture matrix. In addition, mineral characterization of the mixture matrix was tested using X-ray diffraction (XRD) to observe changes in mineral fractions. The results of this study indicate that the addition of Al(OH)3 can improve the mechanical performance of soft clay soil better than soil stabilized with nickel slag alone, with the 1.5% weight ratio providing the highest compressive strength value of 237.39 kPa. This improvement may be due to the formation of pozzolanic reactions, including C–S–H, C–A–H, and C–S–A–H, as shown by the XRD test results.
Citation: Ichsan Rauf, M. Taufiq Yuda Saputra, Heryanto Heryanto, M. Fatahilla Marsaoly. Laboratory investigation of the influence of aluminum hydroxide on the compressive strength of nickel slag-stabilized soft soils[J]. AIMS Materials Science, 2024, 11(6): 1220-1231. doi: 10.3934/matersci.2024060
Chemical stabilization is considered a more effective and efficient method for improving soft soil in road foundation construction. Nickel slag, a byproduct of the nickel industry, has the potential to be developed as an environmentally friendly pozzolanic material for soft soil improvement. Our previous research has shown that nickel slag enhances the mechanical properties of high-plasticity organic soil but fails to meet road foundation standards. As such, additional materials are needed to achieve the required specifications. This study aims to analyze the effect of adding aluminum hydroxide [Al(OH)3] to soil stabilized with nickel slag. The addition of Al(OH)3 is based on weight ratios of nickel slag at 1.5, 2.5, and 3.5. The effectiveness of adding nickel slag was assessed based on the unconfined compressive strength (qu) of the mixture matrix. In addition, mineral characterization of the mixture matrix was tested using X-ray diffraction (XRD) to observe changes in mineral fractions. The results of this study indicate that the addition of Al(OH)3 can improve the mechanical performance of soft clay soil better than soil stabilized with nickel slag alone, with the 1.5% weight ratio providing the highest compressive strength value of 237.39 kPa. This improvement may be due to the formation of pozzolanic reactions, including C–S–H, C–A–H, and C–S–A–H, as shown by the XRD test results.

| [1] | Das BM (2019) Advanced Soil Mechanics, 5 Eds., London: CRC Press. https://doi.org/10.1201/9781351215183 |
| [2] |
Fondjo AA, Theron E, Ray RP (2021) Stabilization of expansive soils using mechanical and chemical methods: A comprehensive review. Civ Eng Archit 9: 1295–1308. https://doi.org/10.13189/cea.2021.090503 doi: 10.13189/cea.2021.090503

|
| [3] | Tripathi A, Saraf SS, Bijwe AR (2021) Analysis and comparison of cost of stabilized soil using e-waste and cement. IRJET 8: 1557–1562. |
| [4] |
Sorsa A (2022) Engineering properties of cement stabilized expansive clay soil. Civ Environ Eng 18: 332–339. https://doi.org/10.2478/cee-2022-0031 doi: 10.2478/cee-2022-0031
|
| [5] |
Paul A, Hussain M (2022) Cement stabilization of Indian peat: An experimental investigation. J Mater Civil Eng 32: 04020350. https://doi.org/10.1061/(ASCE)MT.1943-5533.0003363 doi: 10.1061/(ASCE)MT.1943-5533.0003363
|
| [6] |
Malkanthi S, Balthazaar N, Perera A (2020) Lime stabilization for compressed stabilized earth blocks with reduced clay and silt. Case Stud Constr Mat 12: e00326. https://doi.org/10.1016/j.cscm.2019.e00326 doi: 10.1016/j.cscm.2019.e00326
|
| [7] | Ouedraogo E, Coulibaly O, Ouedraogo A, et al. (2015) Mechanical and thermophysical properties of cement and/or paper (cellulose) stabilized compressed clay bricks. J Mater Eng Struct 2: 68–76. https://revue.ummto.dz/index.php/JMES/article/view/342 |
| [8] | NASA (2020) The causes of climate change. Available from: https://climate.nasa.gov/causes/(Accessed 13 August 2024). |
| [9] |
Shen W, Cao L, Li Q, et al. (2015) Quantifying CO2 emissions from China's cement industry. Renew Sust Energ Rev 50: 1004–1012. https://doi.org/10.1016/j.rser.2015.05.031 doi: 10.1016/j.rser.2015.05.031
|
| [10] |
Khaiyum MZ, Sarker S, Kabir G (2023) Evaluation of carbon emission factors in the cement industry: An emerging economy context. Sustainability 15: 15407. https://doi.org/10.3390/su152115407 doi: 10.3390/su152115407
|
| [11] | American Society for Testing and Materials (2018) Standard terminology relating to concrete and concrete. ASTM-C125. |
| [12] | ACI Committee (1988) Cement and Concrete Terminology: A Glossary of Terms in the Field of Cement and Concrete Technology, Detroit, Michigan: American Concrete Institute. |
| [13] |
Shvarzman A, Kovler K, Schamban I, et al. (2002) Influence of chemical and phase composition of mineral admixtures on their pozzolanic activity. Adv Cem Res 14: 35–41. https://doi.org/10.1680/adcr.2002.14.1.35 doi: 10.1680/adcr.2002.14.1.35
|
| [14] |
Modarres A, Nosoudy YM (2015) Clay stabilization using coal waste and lime—Technical and environmental impacts. Appl Clay Sci 116: 281–288. https://doi.org/10.1016/j.clay.2015.03.026 doi: 10.1016/j.clay.2015.03.026
|
| [15] | Rauf I, Gaus A, Heryanto H, et al. (2023) Analysis and characterization of nickel industry by-products as pozzolan materials. Civ Eng Archit 12: 401–408. http://dx.doi.org/10.13189/cea.2024.120130 |
| [16] |
Rauf I, Heryanto H, Tahir D, et al. (2024) Uncovering the potential of industrial waste: Turning discarded resources into sustainable advanced materials. Phys Scr 99: 065998. https://doi.org/10.1088/1402-4896/ad4ad1 doi: 10.1088/1402-4896/ad4ad1
|
| [17] |
Gaus A, Rauf I, Utama K, et al. (2024) Behavior of physical and density properties of soft soil stabilized with nickel slag. Int J Res Granthaalayah 12: 26–33. https://doi.org/10.29121/granthaalayah.v12.i1.2024.5485 doi: 10.29121/granthaalayah.v12.i1.2024.5485
|
| [18] |
Siregar F, Saputra MR, Gaus A, et al. (2024) Performance of nickel slag as a stabilization material for soft soil. South Asian Res J Eng Tech 6: 29–34. https://doi.org/10.36346/sarjet.2024.v06i01.004 doi: 10.36346/sarjet.2024.v06i01.004
|
| [19] | Dewi AM, Rusdiansyah (2023) The effect of added nickel slag to compression and shear strength on laterite soil South Kalimantan. Cerucuk 7: 41–52. |
| [20] |
Barman D, Dash SK (2022) Stabilization of expansive soils using chemical additives: A review. J Rock Mech Geotech 14: 1319–1342. https://doi.org/10.1016/j.jrmge.2022.02.011 doi: 10.1016/j.jrmge.2022.02.011
|
| [21] | Liu L, Liu Y, Zhang K, et al. (2016) Influence of nickel-iron slag used as admixture on cement properties. Bull Chin Ceram Soc. |
| [22] |
Zivica V, Palou MT (2015) Physico-chemical characterization of thermally treated bentonite. Compos Part B-Eng 68: 436–445. https://doi.org/10.1016/j.compositesb.2014.07.019 doi: 10.1016/j.compositesb.2014.07.019
|
| [23] |
Lin D, Lin K, Luo H (2007) A comparison between sludge ash and fly ash on the improvement in soft soil. J Air Waste Manage 57: 59–64. https://doi.org/10.1080/10473289.2007.10465294 doi: 10.1080/10473289.2007.10465294
|
| [24] |
Pandey A, Dalal S, Dutta S, et al. (2021) Structural characterization of polycrystalline thin films by X-ray diffraction techniques. J Mater Sci Mater Electron 32: 1341–1368. https://doi.org/10.1007/s10854-020-04998-w doi: 10.1007/s10854-020-04998-w
|
| [25] |
An J, Nhung NTH, Ding Y, et al. (2022) Chestnut shell-activated carbon mixed with pyrolytic snail shells for methylene blue adsorption. Materials 15: 8227. https://doi.org/10.3390/ma15228227 doi: 10.3390/ma15228227
|
| [26] |
Du YJ, Wei ML, Jin F, et al. (2013) Stress-strain relation and strength characteristics of cement treated zinc-contaminated clay. Eng Geol 167: 20–26. https://doi.org/10.1016/j.enggeo.2013.10.005 doi: 10.1016/j.enggeo.2013.10.005
|
| [27] |
Shao J, Gao J, Zhao Y, et al. (2019) Study on the pozzolanic reaction of clay brick powder in blended cement pastes. Constr Build Mater 213: 209–215. https://doi.org/10.1016/j.conbuildmat.2019.03.307 doi: 10.1016/j.conbuildmat.2019.03.307
|
| [28] |
Nie S, Hu S, Wang F, et al. (2017) Pozzolanic reaction of lightweight fine aggregate and its influence on the hydration of cement. Constr Build Mater 153: 165–173. https://doi.org/10.1016/j.conbuildmat.2017.07.111 doi: 10.1016/j.conbuildmat.2017.07.111
|
| [29] | Mitchell J (1976) Soil improvement by mechanical and chemical methods. J Geotech Eng 421–434. |
| [30] |
Verma H, Ray A, Rai R, et al. (2021) Ground improvement using chemical methods: A review. Heliyon 7: e07678. https://doi.org/10.1016/j.heliyon.2021.e07678 doi: 10.1016/j.heliyon.2021.e07678
|
| [31] |
Wang Y, Zhao Q, Zhou S, et al. (2019) Effect of C/S ratio on microstructure of calcium silicate hydrates synthesised by solution reaction method. IOP Conf Ser Mater Sci Eng 472: 012003 https://doi.org/10.1088/1757-899X/472/1/012003 doi: 10.1088/1757-899X/472/1/012003
|
| [32] |
Madadi A, Wei J (2022) Characterization of calcium silicate hydrate gels with different calcium to silica ratios and polymer modifications. Gels 8: 75. https://doi.org/10.3390/gels8020075 doi: 10.3390/gels8020075
|
| [33] |
Rao S, Venkatarama Reddy B, Raju G, et al. (2009) Chemical stabilization of lead contaminated gypsum sludge. Int J Geotech Eng 3: 109–116. https://doi.org/10.3328/IJGE.2009.03.01.109-116 doi: 10.3328/IJGE.2009.03.01.109-116
|
| [34] | Julson T, Yerima N, Kaze C, et al. (2022) Design and characterization of iron-calcium-aluminium-silicate-hydrate at low-temperature as a binder for structural composites. SSRN Electron J. https://doi.org/0.2139/ssrn.4158344 |
| [35] |
Mesecke K, Warr LN, Malorny W (2021) Structure modeling and quantitative X-ray diffraction of C-(A)-S-H. J Appl Crystallogr 55: 133–143. https://doi.org/10.1107/S1600576721012668 doi: 10.1107/S1600576721012668
|
| [36] |
Raúl F, Ruiz AI, Cuevas J (2016) Formation of C-A-S-H phases from the interaction between concrete or cement and bentonite. Clay Miner 51: 223–235. https://doi.org/10.1180/claymin.2016.051.2.09 doi: 10.1180/claymin.2016.051.2.09
|
| [37] |
Wang W, Cong J, Deng J, et al. (2018) Developing effective separation of feldspar and quartz while recycling tailwater by HF pretreatment. Minerals 8: 149. https://doi.org/10.3390/min8040149 doi: 10.3390/min8040149
|
| [38] |
Forjanes P, Manuel AJ, Fernández-Díaz L (2020) The formation of barite and celestite through the replacement of gypsum. Minerals 10: 189. https://doi.org/10.3390/min10020189 doi: 10.3390/min10020189
|
| [39] |
Wahab NA, Roshan MJ, Rashid ASA, et al. (2021) Strength and durability of cement-treated lateritic soil. Sustainability 13: 6430. https://doi.org/10.3390/su13116430 doi: 10.3390/su13116430
|
| [40] |
Li X, Zhang C, Xiao H, et al. (2021) Reducing compressibility of the expansive soil by microbiological-induced calcium carbonate precipitation. Adv Civ Eng 8818771. https://doi.org/10.1155/2021/8818771 doi: 10.1155/2021/8818771
|
| [41] |
Mypati VNK, Saride S (2021) Feasibility of alkali-activated low-calcium fly ash as a binder for deep soil mixing. J Mater Civil Eng 34: 04021410. https://doi.org/10.1061/(ASCE)MT.1943-5533.0004047 doi: 10.1061/(ASCE)MT.1943-5533.0004047
|




Figures(5) / Tables(2)

Ichsan Rauf, M. Taufiq Yuda Saputra, Heryanto Heryanto, M. Fatahilla Marsaoly. Laboratory investigation of the influence of aluminum hydroxide on the compressive strength of nickel slag-stabilized soft soils[J]. AIMS Materials Science, 2024, 11(6): 1220-1231. doi: 10.3934/matersci.2024060







 DownLoad:
DownLoad: