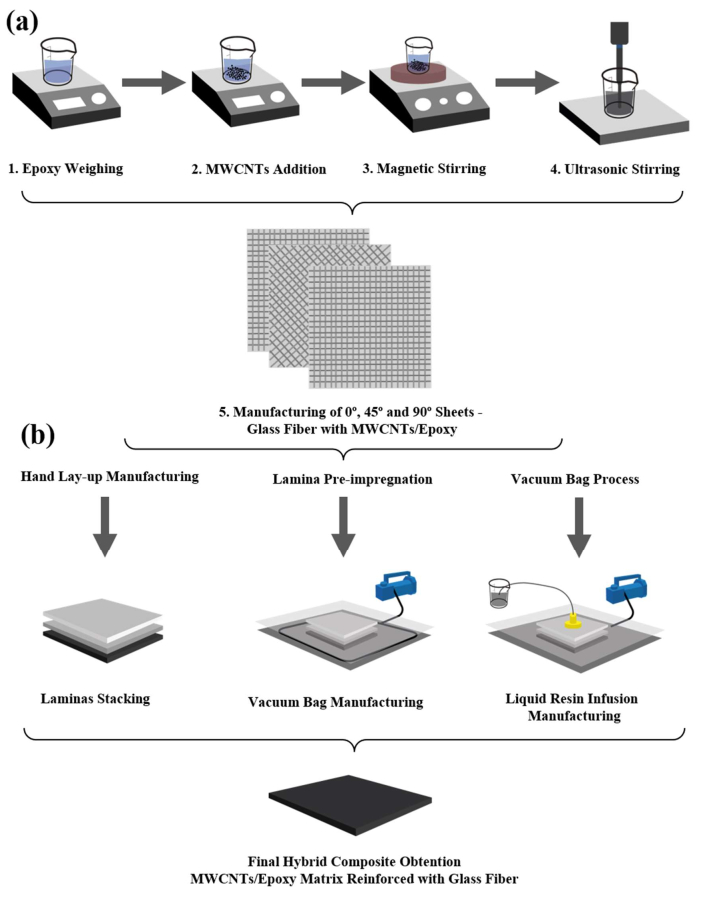
Composites are widely used in different areas of engineering due to their remarkable mechanical properties; however, it has been evidenced that laminated composites exhibit certain vulnerabilities, particularly in interlaminar regions, which can lead to failures. To address this issue, efforts have been made to enhance interlaminar strength, with one notable approach being the incorporation of nano-reinforcements that serve as bridges between the laminate layers. Among these nano-reinforcements, carbon nanotubes (CNTs) have emerged as a highly promising material to mitigate the deficiencies in interlaminar zones. Despite their potential, integrating CNTs into structural laminates presents significant challenges. This research focuses on developing a strategy to effectively incorporate well-dispersed multi-walled carbon nanotubes (MWCNTs) into structural laminate composites to enhance interlaminar toughness. The study explored three different processes for integrating MWCNTs: hand lay-up, vacuum bagging, and liquid resin infusion, each with varying percentages of MWCNT addition. The aim was to determine the most efficient method for achieving uniform dispersion and improved mechanical properties. The results of this investigation demonstrated that well-dispersed MWCNTs significantly enhance the interlaminar and overall mechanical properties of composites. Each method showed varying degrees of success, but the overarching conclusion is clear: MWCNTs, when properly integrated, offer a viable solution to the inherent weaknesses of laminated composites. This advancement holds substantial promise for the future of composite materials, particularly in applications requiring enhanced durability and strength. The findings pave the way for further research and development in optimizing nano-reinforcement techniques, ultimately contributing to the creation of more robust and reliable composite structures.
Citation: Mateo Duarte, Johan A. Oquendo, Sebastián Vallejo, Johnattan Vargas, Yamile Cardona-Maya, Cesar A. Isaza. Fabrication of FRP/CNT hybrid laminate composites and their effect on interlaminar and mechanical properties[J]. AIMS Materials Science, 2024, 11(6): 1125-1144. doi: 10.3934/matersci.2024054
Composites are widely used in different areas of engineering due to their remarkable mechanical properties; however, it has been evidenced that laminated composites exhibit certain vulnerabilities, particularly in interlaminar regions, which can lead to failures. To address this issue, efforts have been made to enhance interlaminar strength, with one notable approach being the incorporation of nano-reinforcements that serve as bridges between the laminate layers. Among these nano-reinforcements, carbon nanotubes (CNTs) have emerged as a highly promising material to mitigate the deficiencies in interlaminar zones. Despite their potential, integrating CNTs into structural laminates presents significant challenges. This research focuses on developing a strategy to effectively incorporate well-dispersed multi-walled carbon nanotubes (MWCNTs) into structural laminate composites to enhance interlaminar toughness. The study explored three different processes for integrating MWCNTs: hand lay-up, vacuum bagging, and liquid resin infusion, each with varying percentages of MWCNT addition. The aim was to determine the most efficient method for achieving uniform dispersion and improved mechanical properties. The results of this investigation demonstrated that well-dispersed MWCNTs significantly enhance the interlaminar and overall mechanical properties of composites. Each method showed varying degrees of success, but the overarching conclusion is clear: MWCNTs, when properly integrated, offer a viable solution to the inherent weaknesses of laminated composites. This advancement holds substantial promise for the future of composite materials, particularly in applications requiring enhanced durability and strength. The findings pave the way for further research and development in optimizing nano-reinforcement techniques, ultimately contributing to the creation of more robust and reliable composite structures.

| [1] |
Bussetta P, Correia N (2018) Numerical forming of continuous fibre reinforced composite material: A review. Compos Part A Appl Sci Manuf 113: 12–31. https://doi.org/10.1016/j.compositesa.2018.07.010 doi: 10.1016/j.compositesa.2018.07.010

|
| [2] |
Barile C, Casavola C, De Cillis F (2019) Mechanical comparison of new composite materials for aerospace applications. Compos B Eng 162: 122–128. https://doi.org/10.1016/j.compositesb.2018.10.101 doi: 10.1016/j.compositesb.2018.10.101
|
| [3] |
Veeresh Kumar GB, Mageshvar R, Rejath R, et al. (2019) Characterization of glass fiber bituminous coal tar reinforced polymer matrix composites for high performance applications. Compos B Eng 175: 107156. https://doi.org/10.1016/j.compositesb.2019.107156 doi: 10.1016/j.compositesb.2019.107156
|
| [4] |
Zhou K (2021) Composite materials and their fiber reinforcement technology in aerospace field. SSR 3: 126–129. https://doi.org/10.36922/ssr.v3i1.1074 doi: 10.36922/ssr.v3i1.1074
|
| [5] | Ballo A, Nä rhi T (2017) Biocompatibility of fiber-reinforced composites for dental applications, In: Shelton R, Biocompatibility of Dental Biomaterials, Cambridge: Woodhead Publishing, 23–39. https://doi.org/10.1016/B978-0-08-100884-3.00003-5 |
| [6] | Sreejith M, Rajeev RS (2021) Fiber reinforced composites for aerospace and sports applications, In: Joseph K, Oksman K, George G, et al. Fiber Reinforced Composites, Cambridge: Woodhead Publishing, 821–859. https://doi.org/10.1016/B978-0-12-821090-1.00023-5 |
| [7] |
Yadav R, Singh M, Shekhawat D, et al. (2023) The role of fillers to enhance the mechanical, thermal, and wear characteristics of polymer composite materials: A review. Compos Part A Appl Sci Manuf 175: 107775. https://doi.org/10.1016/j.compositesa.2023.107775 doi: 10.1016/j.compositesa.2023.107775
|
| [8] |
Yadav R, Lee HH, Meena A, et al. (2022) Effect of alumina particulate and E-glass fiber reinforced epoxy composite on erosion wear behavior using Taguchi orthogonal array. Tribol Int 175: 107860. https://doi.org/10.1016/j.triboint.2022.107860 doi: 10.1016/j.triboint.2022.107860
|
| [9] |
Suriani MJ, Rapi HZ, Ilyas RA, et al. (2021) Delamination and manufacturing defects in natural fiber-reinforced hybrid composite: A review. Polymers 13: 1323. https://doi.org/10.3390/polym13081323 doi: 10.3390/polym13081323
|
| [10] |
Boon Y, Joshi S (2020) A review of methods for improving interlaminar interfaces and fracture toughness of laminated composites. Mater Today Commun 22: 100830. https://doi.org/10.1016/j.mtcomm.2019.100830 doi: 10.1016/j.mtcomm.2019.100830
|
| [11] |
Greco F, Leonetti L, Lonetti P (2015) A novel approach based on ALE and delamination fracture mechanics for multilayered composite beams. Compos B Eng 78: 447–458. https://doi.org/10.1016/j.compositesb.2015.04.004 doi: 10.1016/j.compositesb.2015.04.004
|
| [12] |
Greco F, Lonetti P, Blasi PN (2007) An analytical investigation of debonding problems in beams strengthened using composite plates. Eng Fract Mech 74: 346–372. https://doi.org/10.1016/j.engfracmech.2006.05.023 doi: 10.1016/j.engfracmech.2006.05.023
|
| [13] |
Jurf R, Pipes B (1982) Interlaminar fracture of composite materials. J Compos Mater 16: 386–394. https://doi.org/10.1177/002199838201600503 doi: 10.1177/002199838201600503
|
| [14] |
Guo R, Xian GJ, Li CG, et al. (2022) Effect of fiber hybridization types on the mechanical properties of carbon/glass fiber reinforced polymer composite rod. Mech Adv Mat Struct 29: 6288–6300. https://doi.org/10.1080/15376494.2021.1974620 doi: 10.1080/15376494.2021.1974620
|
| [15] |
Dasore A, Rajak U, Balijepalli R, et al. (2022) An overview of refinements, processing methods and properties of natural fiber composites. Mater Today Proc 49: 296–300. https://doi.org/10.1016/j.matpr.2021.02.103 doi: 10.1016/j.matpr.2021.02.103
|
| [16] |
Yao ZQ, Wang CG, Qin JJ, et al. (2020) Interfacial improvement of carbon fiber/epoxy composites using one-step method for grafting carbon nanotubes on the fibers at ultra-low temperatures. Carbon 164: 133–142. https://doi.org/10.1016/j.carbon.2020.03.060 doi: 10.1016/j.carbon.2020.03.060
|
| [17] |
Dehrooyeh S, Vaseghi M, Sohrabian M, et al. (2021) Glass fiber/carbon nanotube/epoxy hybrid composites: Achieving superior mechanical properties. Mech Mat 161: 104025. https://doi.org/10.1016/j.mechmat.2021.104025 doi: 10.1016/j.mechmat.2021.104025
|
| [18] |
Tabkhpaz M, Mahmoodi M, Arjmand M, et al. (2015) Investigation of chaotic mixing for MWCNT/polymer composites. Macromol Mater Eng 300: 482–496. https://doi.org/10.1002/mame.201400361 doi: 10.1002/mame.201400361
|
| [19] |
Duongthipthewa A, Su YY, Zhou LM (2020) Electrical conductivity and mechanical property improvement by low-temperature carbon nanotube growth on carbon fiber fabric with nanofiller incorporation. Compos B Eng 182: 107581. https://doi.org/10.1016/j.compositesb.2019.107581 doi: 10.1016/j.compositesb.2019.107581
|
| [20] |
Wu YD, Cheng XY, Chen SY, et al. (2021) In situ formation of a carbon nanotube buckypaper for improving the interlaminar properties of carbon fiber composites. Mater Des 202: 109535. https://doi.org/10.1016/j.matdes.2021.109535 doi: 10.1016/j.matdes.2021.109535
|
| [21] |
Thakre P, Lagoudas D, Riddick J, et al. (2011) Investigation of the effect of single wall carbon nanotubes on interlaminar fracture toughness of woven carbon fiber-epoxy composites. J Compos Mater 45: 1091–1107. https://doi.org/10.1177/0021998310389088 doi: 10.1177/0021998310389088
|
| [22] |
Nistal A, Falzon B, Hawkins S, et al. (2019) Enhancing the fracture toughness of hierarchical composites through amino‒functionalised carbon nanotube webs. Compos B Eng 165: 537–544. https://doi.org/10.1016/j.compositesb.2019.02.001 doi: 10.1016/j.compositesb.2019.02.001
|
| [23] |
Nguyen P, Vu X, Ferrier E (2018) Elevated temperature behaviour of carbon fibre-reinforced polymer applied by hand lay-up (M-CFRP) under simultaneous thermal and mechanical loadings: Experimental and analytical investigation. Fire Saf J 100: 103–117. https://doi.org/10.1016/j.firesaf.2018.07.007 doi: 10.1016/j.firesaf.2018.07.007
|
| [24] |
Obande W, Brádaigh C, Ray D (2021) Continuous fibre-reinforced thermoplastic acrylic-matrix composites prepared by liquid resin infusion—A review. Compos B Eng 215: 108771. https://doi.org/10.1016/j.compositesb.2021.108771 doi: 10.1016/j.compositesb.2021.108771
|
| [25] |
Muralidhara B, Kumaresh B, Suresha B (2020) Utilizing vacuum bagging process to prepare carbon fiber/epoxy composites with improved mechanical properties. Mater Today Proc 27: 2022–2028. https://doi.org/10.1016/j.matpr.2019.09.051 doi: 10.1016/j.matpr.2019.09.051
|
| [26] |
Kepple KL, Sanborn GP, Lacasse PA, et al. (2008) Improved fracture toughness of carbon fiber composite functionalized with multi walled carbon nanotubes. Carbon 46: 2026–2033. https://doi.org/10.1016/j.carbon.2008.08.010 doi: 10.1016/j.carbon.2008.08.010
|
| [27] |
Godara A, Mezzo L, Luizi F, et al. (2009) Influence of carbon nanotube reinforcement on the processing and the mechanical behaviour of carbon fiber/epoxy composites. Carbon 47: 2914–2923. https://doi.org/10.1016/j.carbon.2009.06.039 doi: 10.1016/j.carbon.2009.06.039
|
| [28] |
Davis D, Whelan B (2011) An experimental study of interlaminar shear fracture toughness of a nanotube reinforced composite. Compos B Eng 42: 105–116. https://doi.org/10.1016/j.compositesb.2010.06.001 doi: 10.1016/j.compositesb.2010.06.001
|
| [29] |
Yu B, Jiang ZY, Tang XZ, et al. (2014) Enhanced interphase between epoxy matrix and carbon fiber with carbon nanotube-modified silane coating. Compos Sci Technol 99: 131–140. https://doi.org/10.1016/j.compscitech.2014.05.021 doi: 10.1016/j.compscitech.2014.05.021
|
| [30] |
Wicks S, Wang WN, Williams M, et al. (2014) Multi-scale interlaminar fracture mechanisms in woven composite laminates reinforced with aligned carbon nanotubes. Compos Sci Technol 100: 128–135. https://doi.org/10.1016/j.compscitech.2014.06.003 doi: 10.1016/j.compscitech.2014.06.003
|
| [31] |
Yokozeki T, Iwahori Y, Ishiwata S, et al. (2007) Mechanical properties of CFRP laminates manufactured from unidirectional prepregs using CSCNT-dispersed epoxy. Compos Part A Appl Sci Manuf 38: 2121–2130. https://doi.org/10.1016/j.compositesa.2007.07.002 doi: 10.1016/j.compositesa.2007.07.002
|
| [32] |
Sheth D, Maiti S, Patel S, et al. (2021) Enhancement of mechanical properties of carbon fiber reinforced epoxy matrix laminated composites with multiwalled carbon nanotubes. Fullerenes Nanotubes Carbon Nanostruct 29: 288–294. https://doi.org/10.1080/1536383x.2020.1839424 doi: 10.1080/1536383x.2020.1839424
|
| [33] |
Rathore D, Prusty R, Kumar D, et al. (2016) Mechanical performance of CNT-filled glass fiber/epoxy composite in in-situ elevated temperature environments emphasizing the role of CNT content. Compos Part A Appl Sci Manuf 84: 364–376. https://doi.org/10.1016/j.compositesa.2016.02.020 doi: 10.1016/j.compositesa.2016.02.020
|
| [34] |
Tugrul S, Tanoglu M, Schulte K (2008) Mode Ⅰ and mode Ⅱ fracture toughness of E-glass non-crimp fabric/carbon nanotube (CNT) modified polymer based composites. Eng Fract Mech 75: 5151–5162. https://doi.org/10.1016/j.engfracmech.2008.08.003 doi: 10.1016/j.engfracmech.2008.08.003
|
| [35] |
Fan ZH, Santare MH, Advani SG (2008) Interlaminar shear strength of glass fiber reinforced epoxy composites enhanced with multi-walled carbon nanotubes. Compos Part A Appl Sci Manuf 39: 540–554. https://doi.org/10.1016/j.compositesa.2007.11.013 doi: 10.1016/j.compositesa.2007.11.013
|
| [36] | Joshi SC, Dikshit V (2011) Enhancing interlaminar fracture characteristics of woven CFRP prepreg composites through CNT dispersion. 46: 665–675. https://doi.org/10.1177/0021998311410472 |
| [37] |
Medina S, Isaza C, Meza J, et al. (2015) Mechanical and thermal behavior of polyvinyl alcohol reinforced with aligned carbon nanotubes. Matéria 20: 794–802. https://doi.org/10.1590/S1517-707620150003.0085 doi: 10.1590/S1517-707620150003.0085
|
| [38] |
Tiwari M, Billing B, Bedi H, et al. (2020) Quantification of carbon nanotube dispersion and its correlation with mechanical and thermal properties of epoxy nanocomposites. J Appl Polym Sci 137: 48879. https://doi.org/10.1002/APP.48879 doi: 10.1002/APP.48879
|
| [39] |
Avella M, Errico ME, Martelli S, et al. (2001) Preparation methodologies of polymer matrix nanocomposites. Appl Organomet Chem 15: 435–439. https://doi.org/10.1002/aoc.168 doi: 10.1002/aoc.168
|
| [40] |
Lillehei P, Kim JW, Gibbons L, et al. (2009) A quantitative assessment of carbon nanotube dispersion in polymer matrices. Nanotechnology 20: 325708. https://doi.org/10.1088/0957-4484/20/32/325708 doi: 10.1088/0957-4484/20/32/325708
|
| [41] |
Siddiqui N, Li E, Sham ML, et al. (2010) Tensile strength of glass fibres with carbon nanotube-epoxy nanocomposite coating: Effects of CNT morphology and dispersion state. Compos Part A Appl Sci Manuf 41: 539–548. https://doi.org/10.1016/j.compositesa.2009.12.011 doi: 10.1016/j.compositesa.2009.12.011
|
| [42] |
Liu Y, Yang JP, Xiao HM, et al. (2012) Role of matrix modification on interlaminar shear strength of glass fibre/epoxy composites. Compos B Eng 43: 95–98. https://doi.org/10.1016/j.compositesb.2011.04.037 doi: 10.1016/j.compositesb.2011.04.037
|
| [43] |
Chandrasekaran VCS, Advani SG, Santare MH (2011) Influence of resin properties on interlaminar shear strength of glass/epoxy/MWNT hybrid composites. Compos Part A Appl Sci Manuf 42: 1007–1016. https://doi.org/10.1016/j.compositesa.2011.04.004 doi: 10.1016/j.compositesa.2011.04.004
|
| [44] |
Lee J, Lim J, Huh J (2000) Mode Ⅱ interlaminar fracture behavior of carbon bead-filled epoxy/glass fiber hybrid composite. Polym Compos 21: 343–352. https://doi.org/10.1002/pc.10191 doi: 10.1002/pc.10191
|
| [45] |
Albertsen H, Ivens J, Peters P, et al. (1995) Interlaminar fracture toughness of CFRP influenced by fibre surface treatment: Part 1. Experimental results. Compos Sci Technol 54: 133–145. https://doi.org/10.1016/0266-3538(95)00048-8 doi: 10.1016/0266-3538(95)00048-8
|
| [46] |
Wang PF, Zhang X, Lim GH, et al. (2015) Improvement of impact-resistant property of glass fiber-reinforced composites by carbon nanotube-modified epoxy and pre-stretched fiber fabrics. J Mater Sci 50: 5978–5992. https://doi.org/10.1007/s10853-015-9145-3 doi: 10.1007/s10853-015-9145-3
|

Figures(11)

Mateo Duarte, Johan A. Oquendo, Sebastián Vallejo, Johnattan Vargas, Yamile Cardona-Maya, Cesar A. Isaza. Fabrication of FRP/CNT hybrid laminate composites and their effect on interlaminar and mechanical properties[J]. AIMS Materials Science, 2024, 11(6): 1125-1144. doi: 10.3934/matersci.2024054







 DownLoad:
DownLoad: