Computational tools have been used in structural engineering design for numerous objectives, typically focusing on optimizing a design process. We first provide a detailed literature review for optimizing truss structures with metaheuristic algorithms. Then, we evaluate an effective solution for designing truss structures used in structural engineering through a method called the mountain gazelle optimizer, which is a nature-inspired meta-heuristic algorithm derived from the social behavior of wild mountain gazelles. We use benchmark problems for truss optimization and a penalty method for handling constraints. The performance of the proposed optimization algorithm will be evaluated by solving complex and challenging problems, which are common in structural engineering design. The problems include a high number of locally optimal solutions and a non-convex search space function, as these are considered suitable to evaluate the capabilities of optimization algorithms. This work is the first of its kind, as it examines the performance of the mountain gazelle optimizer applied to the structural engineering design field while assessing its ability to handle such design problems effectively. The results are compared to other optimization algorithms, showing that the mountain gazelle optimizer can provide optimal and efficient design solutions with the lowest possible weight.
Citation: Nima Khodadadi, El-Sayed M. El-Kenawy, Francisco De Caso, Amal H. Alharbi, Doaa Sami Khafaga, Antonio Nanni. The Mountain Gazelle Optimizer for truss structures optimization[J]. Applied Computing and Intelligence, 2023, 3(2): 116-144. doi: 10.3934/aci.2023007
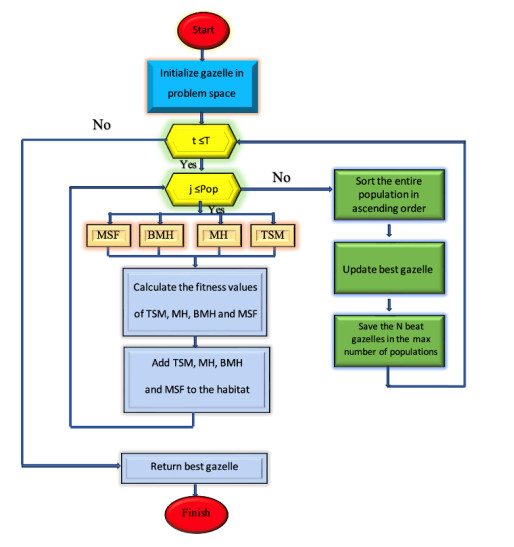
Computational tools have been used in structural engineering design for numerous objectives, typically focusing on optimizing a design process. We first provide a detailed literature review for optimizing truss structures with metaheuristic algorithms. Then, we evaluate an effective solution for designing truss structures used in structural engineering through a method called the mountain gazelle optimizer, which is a nature-inspired meta-heuristic algorithm derived from the social behavior of wild mountain gazelles. We use benchmark problems for truss optimization and a penalty method for handling constraints. The performance of the proposed optimization algorithm will be evaluated by solving complex and challenging problems, which are common in structural engineering design. The problems include a high number of locally optimal solutions and a non-convex search space function, as these are considered suitable to evaluate the capabilities of optimization algorithms. This work is the first of its kind, as it examines the performance of the mountain gazelle optimizer applied to the structural engineering design field while assessing its ability to handle such design problems effectively. The results are compared to other optimization algorithms, showing that the mountain gazelle optimizer can provide optimal and efficient design solutions with the lowest possible weight.

| [1] |
A. A. Abdelhamid, S. K. Towfek, N. Khodadadi, A. A. Alhussan, D. S. Khafaga, M. M. Eid, et al., Waterwheel Plant Algorithm: A Novel Metaheuristic Optimization Method, Processes, 11 (2003), 1502. https://doi.org/10.3390/pr11051502 doi: 10.3390/pr11051502

|
| [2] |
W. Lingyun, Z. Mei, W. Guangming, M. Guang, Truss optimization on shape and sizing with frequency constraints based on genetic algorithm, Comput. Mech., 35 (2005), 361–368. https://doi.org/10.1016/j.jsv.2014.07.027 doi: 10.1016/j.jsv.2014.07.027
|
| [3] |
M. Sonmez, Artificial Bee Colony algorithm for optimization of truss structures, Appl. Soft Comput., 11 (2011), 2406–2418. https://doi.org/10.1016/j.asoc.2010.09.003 doi: 10.1016/j.asoc.2010.09.003
|
| [4] | J. Pierezan, L. dos Santos Coelho, V. C. Mariani, E. H. de Vasconcelos Segundo, D. Prayogo, Chaotic coyote algorithm applied to truss optimization problems, Comput. Struct., 242 (2021), 106353. https://doi.org/10.1016/j.compstruc.2020.106353 |
| [5] |
A. Kaveh, B. F. Azar, S. Talatahari, Ant colony optimization for design of space trusses, Int. J. Sp. Struct., 23 (2008), 167–181. https://doi.org/10.1260/026635108786260956 doi: 10.1260/026635108786260956
|
| [6] | N. Khodadadi, F. S. Gharehchopogh, B. Abdollahzadeh, S. Mirjalili, Space truss structures' optimization using metaheuristic optimization algorithms, Comprehensive Metaheuristics, (2023), 163–179. https://doi.org/10.1016/B978-0-323-91781-0.00009-0 |
| [7] |
C. V. Camp, Design of space trusses using Big Bang–Big Crunch optimization, J. Struct. Eng., 133 (2007), 999–1008. https://doi.org/10.1061/(ASCE)0733-9445(2007)133:7(999) doi: 10.1061/(ASCE)0733-9445(2007)133:7(999)
|
| [8] | A. Kaveh, S. Talatahari, N. Khodadadi, Stochastic paint optimizer: theory and application in civil engineering, Eng. Comput., (2020), 1–32. https://doi.org/10.1007/s00366-020-01179-5 |
| [9] |
A. Kaveh, S. Talatahari, N. Khodadadi, The Hybrid Invasive Weed Optimization-Shuffled Frog-leaping Algorithm Applied to Optimal Design of Frame Structures, Period. Polytech. Civ. Eng., 63 (2019), 882–897. https://doi.org/10.1007/s40996-019-00280-0 doi: 10.1007/s40996-019-00280-0
|
| [10] |
H. Garg, A hybrid PSO-GA algorithm for constrained optimization problems, Appl. Math. Comput., 274 (2016), 292–305. https://doi.org/10.1016/j.amc.2015.11.001 doi: 10.1016/j.amc.2015.11.001
|
| [11] |
W. Zuo, J. Bai, B. Li, A hybrid OC–GA approach for fast and global truss optimization with frequency constraints, Appl. Soft Comput., 14 (2014), 528–535. https://doi.org/10.1016/j.asoc.2013.09.002 doi: 10.1016/j.asoc.2013.09.002
|
| [12] |
N. Khodadadi, E. Harati, F. De Caso, A. Nanni, Optimizing Truss Structures Using Composite Materials under Natural Frequency Constraints with a New Hybrid Algorithm Based on Cuckoo Search and Stochastic Paint Optimizer (CSSPO), Buildings, 13 (2023), 1551. https://doi.org/10.3390/buildings13061551 doi: 10.3390/buildings13061551
|
| [13] |
G. I. Sayed, A. E. Hassanien, A hybrid SA-MFO algorithm for function optimization and engineering design problems, Complex Intell. Syst., 4 (2018), 195–212. https://doi.org/10.1007/s40747-018-0066-z doi: 10.1007/s40747-018-0066-z
|
| [14] | N. Khodadadi, S. Talatahari, A. Dadras Eslamlou, MOTEO: a novel multi-objective thermal exchange optimization algorithm for engineering problems, Soft Comput., (2022), 1–26. https://doi.org/10.1007/s00500-022-07050-7 |
| [15] |
N. Khodadadi, L. Abualigah, S. Mirjalili, Multi-objective Stochastic Paint Optimizer (MOSPO), Neural Comput. Appl., 34 (2022), 18035-18058. https://doi.org/10.1007/s00521-022-07405-z doi: 10.1007/s00521-022-07405-z
|
| [16] |
N. Khodadadi, L. Abualigah, Q. Al-Tashi, S. Mirjalili, Multi-objective chaos game optimization, Neural Comput. Appl., 35 (2023), 14973–15004. https://doi.org/10.1007/s00521-023-08432-0 doi: 10.1007/s00521-023-08432-0
|
| [17] |
W. Lin, D. Y. Yu, C. Zhang, X. Liu, S. Zhang, Y. Tian, et al., A multi-objective teaching− learning-based optimization algorithm to scheduling in turning processes for minimizing makespan and carbon footprint, J. Clean. Prod., 101 (2015), 337–347. https://doi.org/10.1016/j.jclepro.2015.03.099 doi: 10.1016/j.jclepro.2015.03.099
|
| [18] | N. Khodadadi, S. M. Mirjalili, S. Mirjalili, Multi-objective Moth-Flame Optimization Algorithm for Engineering Problems, in Handbook of Moth-Flame Optimization Algorithm, CRC Press, 79–96. |
| [19] |
M. Khishe, N. Orouji, M. R. Mosavi, Multi-Objective chimp Optimizer: An innovative algorithm for Multi-Objective problems, Expert Syst. Appl., 211 (2023), 118734. https://doi.org/10.1016/j.eswa.2022.118734 doi: 10.1016/j.eswa.2022.118734
|
| [20] |
N. Khodadadi, L. Abualigh, E.-S. M. EI-Kenawy, V. Snasel, S. Mirjalili, An Archive-based Multi-Objective Arithmetic Optimization Algorithm for Solving Industrial Engineering Problems, IEEE Access, 10 (2022), 106673-106698. https://doi.org/10.1109/ACCESS.2022.3212081 doi: 10.1109/ACCESS.2022.3212081
|
| [21] |
M. Azizi, S. Talatahari, N. Khodadadi, P. Sareh, Multi-Objective Atomic Orbital Search (MOAOS) for Global and Engineering Design Optimization, IEEE Access, 10 (2022), 67727-67746. https://doi.org/10.1109/ACCESS.2022.3186696 doi: 10.1109/ACCESS.2022.3186696
|
| [22] |
T. H. B. Huy, P. Nallagownden, K. H. Truong, R. Kannan, D. N. Vo, N. Ho, Multi-objective search group algorithm for engineering design problems, Appl. Soft Comput., 126 (2022), 109287. https://doi.org/10.1016/j.asoc.2022.109287. doi: 10.1016/j.asoc.2022.109287
|
| [23] | N. Khodadadi, S. M. Mirjalili, W. Zhao, Z. Zhang, L. Wang, S. Mirjalili, Multi-Objective Artificial Hummingbird Algorithm, Advances in Swarm Intelligence: Variations and Adaptations for Optimization Problems, Springer, (2022), 407–419. https://doi.org/10.1007/978-3-031-09835-2_22 |
| [24] | N. Khodadadi, S. M. Mirjalili, S. Z. Mirjalili, S. Mirjalili, Chaotic Stochastic Paint Optimizer (CSPO), Proceedings of 7th International Conference on Harmony Search, Soft Computing and Applications, (2022), 195–205. https://doi.org/10.1007/978-981-19-2948-9_19 |
| [25] |
Y. Li, S. Wang, M. Han, Truss structure optimization based on improved chicken swarm optimization algorithm, Adv. Civ. Eng., (2019), 1-16. https://doi.org/10.1155/2019/6902428 doi: 10.1155/2019/6902428
|
| [26] |
N. Khodadadi, S. Talatahari, A. H. Gandomi, ANNA: advanced neural network algorithm for optimisation of structures, Proc. Inst. Civ. Eng. - Struct. Build., (2023), 1–23. https://doi.org/10.1680/jstbu.22.00083 doi: 10.1680/jstbu.22.00083
|
| [27] |
E.-S. M. El-Kenawy, N. Khodadadi, S. Mirjalili, T. Makarovskikh, M. Abotaleb, F. K. Karim, et al., Metaheuristic optimization for improving weed detection in wheat images captured by drones, Mathematics, 10 (2022), 4421. https://doi.org/10.3390/math10234421 doi: 10.3390/math10234421
|
| [28] |
S. Chakraborty, S. Sharma, A. K. Saha, A. Saha, A novel improved whale optimization algorithm to solve numerical optimization and real-world applications, Artif. Intell. Rev., (2022), 1–112. https://doi.org/10.1007/s10462-021-10114-z doi: 10.1007/s10462-021-10114-z
|
| [29] | Q. Al-Tashi, S. Mirjalili, J. Wu, S. J. Abdulkadir, T. M. Shami, N. Khodadadi, et al., Moth-Flame Optimization Algorithm for Feature Selection: A Review and Future Trends, Handb. Moth-Flame Optim. Algorithm, (2022), 11–34. |
| [30] |
A. A. Alhussan, A. A. Abdelhamid, S. K. Towfek, A. Ibrahim, L. Abualigah, N. Khodadadi, et al., Classification of Breast Cancer Using Transfer Learning and Advanced Al-Biruni Earth Radius Optimization, Biomimetics, 8 (2023), 270. https://doi.org/10.3390/biomimetics8030270 doi: 10.3390/biomimetics8030270
|
| [31] |
N. Khodadadi, S. Vaclav, S. Mirjalili, Dynamic Arithmetic Optimization Algorithm for Truss Optimization Under Natural Frequency Constraints, IEEE Access, 10 (2022), 16188–16208. https://doi.org/10.1109/ACCESS.2022.3146374 doi: 10.1109/ACCESS.2022.3146374
|
| [32] | E.-G. Talbi, Metaheuristics: from design to implementation, vol. 74. John Wiley & Sons, 2009. |
| [33] | N. Khodadadi, S. Mirjalili, Truss optimization with natural frequency constraints using generalized normal distribution optimization, Appl. Intell., (2022), 1–14. https://doi.org/10.1007/s10489-021-03051-5 |
| [34] |
D. H. Wolpert, W. G. Macready, No free lunch theorems for optimization, IEEE Trans. Evol. Comput., 1 (1997), 67–82. https://doi.org/10.1109/4235.585893 doi: 10.1109/4235.585893
|
| [35] | N. Khodadadi, A. Ö. Çiftçioğlu, S. Mirjalili, A. Nanni, A comparison performance analysis of eight meta-heuristic algorithms for optimal design of truss structures with static constraints, Decis. Anal. J., (2023), 100266. https://doi.org/10.1016/j.dajour.2023.100266 |
| [36] |
B. Abdollahzadeh, F. S. Gharehchopogh, N. Khodadadi, S. Mirjalili, Mountain Gazelle Optimizer: A new Nature-inspired Metaheuristic Algorithm for Global Optimization Problems, Adv. Eng. Softw., 174 (2022), 103282. https://doi.org/10.1016/j.advengsoft.2022.103282 doi: 10.1016/j.advengsoft.2022.103282
|
| [37] |
L. Abualigah, A. Diabat, S. Mirjalili, M. Abd Elaziz, A. H. Gandomi, The arithmetic optimization algorithm, Comput. Methods Appl. Mech. Eng., 376 (2021), 113609. https://doi.org/10.1016/j.cma.2020.113609 doi: 10.1016/j.cma.2020.113609
|
| [38] |
S. Talatahari, M. Azizi, A. H. Gandomi, Material Generation Algorithm: A Novel Metaheuristic Algorithm for Optimization of Engineering Problems, Processes, 9 (2021), 859. https://doi.org/10.3390/pr9050859 doi: 10.3390/pr9050859
|
| [39] |
S. Talatahari, M. Azizi, M. Tolouei, B. Talatahari, P. Sareh, Crystal Structure Algorithm (CryStAl): A Metaheuristic Optimization Method, IEEE Access, 9 (2021), 71244–71261. https://doi.org/10.1109/ACCESS.2021.3079161 doi: 10.1109/ACCESS.2021.3079161
|
| [40] |
S. O. Degertekin, Improved harmony search algorithms for sizing optimization of truss structures, Comput. Struct., 92 (2012), 229–241. https://doi.org/10.1016/j.compstruc.2011.10.022 doi: 10.1016/j.compstruc.2011.10.022
|
| [41] |
S. O. Degertekin, M. S. Hayalioglu, Sizing truss structures using teaching-learning-based optimization, Comput. Struct., 119 (2013), 177–188. https://doi.org/10.1016/j.compstruc.2012.12.011 doi: 10.1016/j.compstruc.2012.12.011
|
| [42] |
A. Kaveh, R. Sheikholeslami, S. Talatahari, M. Keshvari-Ilkhichi, Chaotic swarming of particles: a new method for size optimization of truss structures, Adv. Eng. Softw., 67 (2014), 136–147. https://doi.org/10.1016/j.advengsoft.2013.09.006 doi: 10.1016/j.advengsoft.2013.09.006
|
| [43] |
G. Bekdaş, S. M. Nigdeli, X.-S. Yang, Sizing optimization of truss structures using flower pollination algorithm, Appl. Soft Comput., 37 (2015), 322–331. https://doi.org/10.1016/j.asoc.2015.08.037 doi: 10.1016/j.asoc.2015.08.037
|
| [44] |
F. K. J. Jawad, C. Ozturk, W. Dansheng, M. Mahmood, O. Al-Azzawi, A. Al-Jemely, Sizing and layout optimization of truss structures with artificial bee colony algorithm, Structures, (2021), 546–559. https://doi.org/10.1016/j.istruc.2021.01.016 doi: 10.1016/j.istruc.2021.01.016
|
| [45] | R. Awad, Sizing optimization of truss structures using the political optimizer (PO) algorithm, Structures, (2021), 4871–4894. https://doi.org/10.1016/j.istruc.2021.07.027 |
| [46] |
M. S. Gonçalves, R. H. Lopez, L. F. F. Miguel, Search group algorithm: a new metaheuristic method for the optimization of truss structures, Comput. Struct., 153 (2015), 165–184. https://doi.org/10.1016/j.compstruc.2015.03.003 doi: 10.1016/j.compstruc.2015.03.003
|
| [47] | V. Goodarzimehr, F. Omidinasab, N. Taghizadieh, Optimum design of space structures using hybrid particle swarm optimization and genetic algorithm, World J. Eng., 2022, in press. https://doi.org/10.1108/WJE-05-2021-0279 |
| [48] |
A. Kaveh, A. D. Eslamlou, N. Khodadadi, Dynamic Water Strider Algorithm for Optimal Design of Skeletal Structures, Period. Polytech. Civ. Eng., 64 (2020), 904–916. https://doi.org/10.3311/PPci.16401 doi: 10.3311/PPci.16401
|
| [49] |
A. Kaveh, S. Talatahari, N. Khodadadi, Hybrid invasive weed optimization-shuffled frog-leaping algorithm for optimal design of truss structures, Iran. J. Sci. Technol. Trans. Civ. Eng., 44 (2019), 405–420. https://doi.org/10.1007/s40996-019-00280-0 doi: 10.1007/s40996-019-00280-0
|
| [50] |
C. K. Soh, J. Yang, Fuzzy controlled genetic algorithm search for shape optimization, J. Comput. Civ. Eng., 10 (1996), 143–150. https://doi.org/10.1061/(ASCE)0887-3801(1996)10:2(143) doi: 10.1061/(ASCE)0887-3801(1996)10:2(143)
|
| [51] | A. Construction, Manual of steel construction: allowable stress design, Am. Inst. Steel Constr. Chicago, IL, USA, 1989. |













Figures(14) / Tables(6)
Nima Khodadadi, El-Sayed M. El-Kenawy, Francisco De Caso, Amal H. Alharbi, Doaa Sami Khafaga, Antonio Nanni. The Mountain Gazelle Optimizer for truss structures optimization[J]. Applied Computing and Intelligence, 2023, 3(2): 116-144. doi: 10.3934/aci.2023007







 DownLoad:
DownLoad: