Citation: David B. Douglas, Robert E. Douglas, Cliff Wilke, David Gibson, John Boone, Max Wintermark. A systematic review of 3D cursor in the medical literature[J]. AIMS Electronics and Electrical Engineering, 2018, 2(1): 1-11. doi: 10.3934/ElectrEng.2018.1.1

| [1] |
Mitchell JM, LaGalia RR (2009) Controlling the escalating use of advanced imaging: the role of radiology benefit management programs. Med Care Res Rev 66: 339–351. doi: 10.1177/1077558709332055

|
| [2] |
Mettler FA, Jr., Wiest PW, Locken JA, et al. (2000) CT scanning: patterns of use and dose. J Radiol Prot 20: 353–359. doi: 10.1088/0952-4746/20/4/301
|
| [3] |
Mitchell DG, Parker L, Sunshine JH, et al. (2002) Body MR imaging and CT volume: variations and trends based on an analysis of medicare and fee-for-service health insurance databases. Am J Roentgenol 179: 27–31. doi: 10.2214/ajr.179.1.1790027
|
| [4] |
Boone JM, Brunberg JA (2008) Computed tomography use in a tertiary care university hospital. J Am Coll Radiol 5: 132–138. doi: 10.1016/j.jacr.2007.07.008
|
| [5] | MEREL T (2015) The 7 drivers of the $150 billion AR/VR industry. Aol Tech. |
| [6] | Douglas D (2013) US 8,384,771 Method and Apparatus for Three Dimensional Viewing of Images. USA: US Patent Office. |
| [7] | Douglas D (2016) US 9,349,183 Method and Apparatus for Three Dimensional Viewing of Images. USA: US Patent Office. |
| [8] | Douglas DB, Boone JM, Petricoin E, et al. (2016) Augmented Reality Imaging System: 3D Viewing of a Breast Cancer. J Nat Sci 2. |
| [9] | Douglas DB, Petricoin EF, Liotta L, et al. (2016) D3D augmented reality imaging system: proof of concept in mammography. Med Devices (Auckl) 9: 277–283. |
| [10] |
Douglas DB, Wilke CA, Gibson JD, et al. (2017) Augmented Reality: Advances in Diagnostic Imaging. Multimodal Technologies and Interaction 1: 29. doi: 10.3390/mti1040029
|
| [11] | Butts DR, McAllister DF (1988) Implementation of true 3D cursors in computer graphics. SPIE Proc 902: Three-Dimensional Imaging and Remote Sensing Imaging (January 1988): 74–84. |
| [12] |
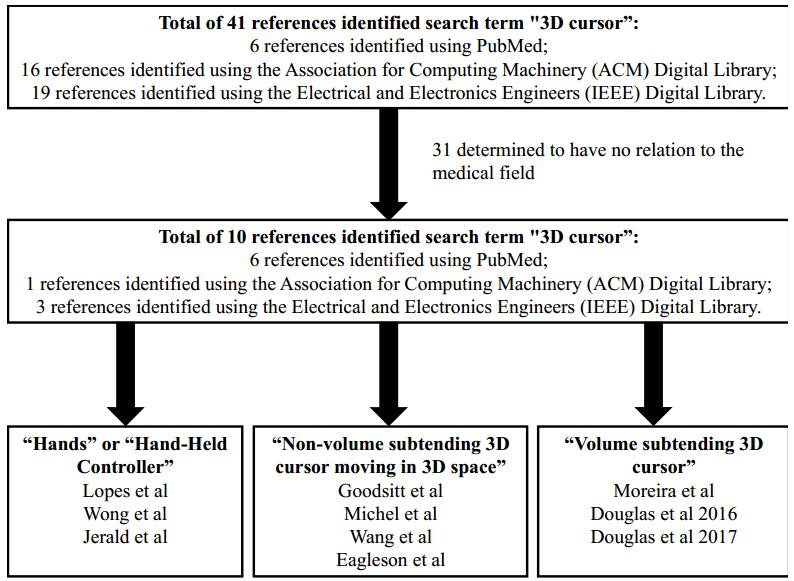
Moher D, Liberati A, Tetzlaff J, et al. (2009) Preferred reporting items for systematic reviews and meta-analyses: the PRISMA statement. PLoS medicine 6: e1000097. doi: 10.1371/journal.pmed.1000097
|
| [13] |
Lopes DS, de Figueiredo Parreira PD, Paulo SF, et al. (2017) On the utility of 3D hand cursors to explore medical volume datasets with a touchless interface. J biomed inform 72: 140–149. doi: 10.1016/j.jbi.2017.07.009
|
| [14] |
Wang W, Collinger JL, Degenhart AD, et al. (2013) An electrocorticographic brain interface in an individual with tetraplegia. PloS one 8: e55344. doi: 10.1371/journal.pone.0055344
|
| [15] | Goodsitt MM, Chan HP, Hadjiiski L (2000) Stereomammography: Evaluation of depth perception using a virtual 3D cursor. Mel phys 27: 1305–1310. |
| [16] |
Wong TZ, Lateiner JS, Mahon TG, et al. (1996) Stereoscopically guided characterization of three-dimensional dynamic MR images of the breast. Radiology 198: 288–291. doi: 10.1148/radiology.198.1.8539396
|
| [17] | Park S, Kim S, Park J (2012) Select ahead: efficient object selection technique using the tendency of recent cursor movements. Asia-Pacific Computer and Human Interaction: 51–58. |
| [18] | Katzakis N, Kiyokawa K, Takemura H (2013) Plane-casting: 3D cursor control with a smartphone. Asia-Pacific Computer and Human Interaction: 199–200. |
| [19] |
Hudson SE (1992) The interaction technique notebook: Adding shadows to a 3D cursor. ACM Transactions on Graphics (TOG) 11: 193–199. doi: 10.1145/130881.370599
|
| [20] | Dorta T, Kinayoglu G, Hoffmann M (2015) Hyve-3D and rethinking the 3D cursor: unfolding a natural interaction model for remote and local co-design in VR. International Conference on Computer Graphics and Interactive Techniques: 43. |
| [21] | Biocca F, Tang A, Owen C, et al. (2006) Attention funnel: omnidirectional 3D cursor for mobile augmented reality platforms. Human Factors in Computing Systems: 1115–1122. |
| [22] | Jung T, Bauer P (2017) Constraint-based modeling technique for mid-air interaction. Symposium on Spatial User Interaction: 157–157. |
| [23] | Feng J, Wartell Z (2014) Riding the plane: bimanual, desktop 3D manipulation. User Interface Software and Technology: 93–94. |
| [24] | Brewer J, Anderson D (1976) Techniques for interactive three dimensional design. International Conference on Computer Graphics and Interactive Techniques: 13–30. |
| [25] | Venolia D (1993) Facile 3D direct manipulation. Human Factors in Computing Systems: 31–36. |
| [26] | Teather RJ, Stuerzlinger W (2012) A system for evaluating 3D pointing techniques. Virtual Reality Software and Technology: 209–210. |
| [27] | Elmqvist N (2005) BalloonProbe: Reducing occlusion in 3D using interactive space distortion. Virtual Reality Software and Technology: 134–137. |
| [28] | Brewer JA, Anderson DC (1977) Visual interaction with overhauser curves and surfaces. International Conference on Computer Graphics and Interactive Techniques 11: 132–137. |
| [29] | Jerald J, Yoganandan A (2011) iMedic: immersive medical environment for distributed interactive consultation. International Conference on Computer Graphics and Interactive Techniques: 99–99. |
| [30] | Menelas B-AJ (2013) Interactive analysis of cavity-flows in a virtual environment. Spring Conference on Computer Graphics: 31–37. |
| [31] | Serrar Z, Elmarzouqi N, Jarir Z, et al. (2014) Evaluation of Disambiguation Mechanisms of Object-Based Selection in Virtual Environment: Which Performances and Features to Support "Pick Out"? International Conference on Human-Computer Interaction: 29. |
| [32] |
Ware C, Lowther K (1997) Selection using a one-eyed cursor in a fish tank VR environment. ACM Transactions on Computer-Human Interaction (TOCHI) 4: 309–322. doi: 10.1145/267135.267136
|
| [33] | Biocca F, Tang A, Owen C, et al. (2006) The omnidirectional attention funnel: A dynamic 3D cursor for mobile augmented reality systems. Hawaii International Conference on System Sciences 1: 22c–22c. |
| [34] | Kadri A, Lécuyer A, Burkhardt J-M, et al. (2007) The Influence of Visual Appearance of User's Avatar on the Manipulation of Objects in Virtual Environments. IEEE Virtual Reality Conference: 291–292. |
| [35] | Young TS, Teather RJ, MacKenzie IS (2017) An arm-mounted inertial controller for 6DOF input: Design and evaluation. Symposium on 3D User Interfaces: 26–35. |
| [36] | Moreira DA, Hage C, Luque EF, et al. (2015) 3D markup of radiological images in ePAD, a web-based image annotation tool. Computer-Based Medical Sytems: 97–102. |
| [37] | Jáuregui DAG, Argelaguet F, Lecuyer A (2012) Design and evaluation of 3D cursors and motion parallax for the exploration of desktop virtual environments. Symposium on 3D User Interfaces: 69–76. |
| [38] | Kadri A, Lécuyer A, Burkhardt J-M (2007) The visual appearance of user's avatar can influence the manipulation of both real devices and virtual objects. Symposium on 3D User Interfaces: 11. |
| [39] | Wither J, Höllerer T (2005) Pictorial depth cues for outdoor augmented reality. International Symposium on Wearable Computers: 92–99. |
| [40] | Wither J, Höllerer T (2004) Evaluating techniques for interaction at a distance. International Symposium on Wearable Computers 1: 124–127. |
| [41] | Wu S-T, Abrantes M, Tost D, et al. (2003) Picking and snapping for 3d input devices. Brazilian Symposium on Computer Graphics and Image Processing: 140–147. |
| [42] | Schwartz AB, Tillery SH, Taylor DM (2003) Cortical control of natural arm movement. International IEEE/EMBS Conference on Neural Engineering: 99. |
| [43] | Adachi Y (1993) Touch and trace on the free-form surface of virtual object. IEEE Virtual Reality Conference: 162–168. |
| [44] | Stein T, Coquillart S (2000) The metric cursor. Pacific Conference on Computer Graphics and Applications: 381–386. |
| [45] | Michel C, Sibomana M, Bodart J-M, et al. (1995) Interactive delineation of brain sulci and their merging into functional PET images. Nuclear Science Symposium and Medical Imaging Conference 3: 1480–1484. |
| [46] |
Ernst H, Petzold J, Larice R, et al. (1996) Mixing of computer graphics and high-quality stereographic video. IEEE transactions on consumer electronics 42: 795–799. doi: 10.1109/30.536187
|
| [47] | Özacar K, Hincapié-Ramos JD, Takashima K, et al. (2016) 3D Selection Techniques for Mobile Augmented Reality Head-Mounted Displays. Interact Comput 29: 579–591. |
| [48] | Eagleson R, Wucherer P, Stefan P, et al. (2015) Collaborative table-top VR display for neurosurgical planning. IEEE Virtual Reality Conference: 169–170. |
| [49] | Ernst H, Petzold J, Larice R, et al. (1996) High-quality overlay of live stereo video on computer graphics. International Conference on Consumer Electronics: 404. |
| [50] | Taylor DM (2007) The importance of online error correction and feed-forward adjustment in brain-machine interfaces for restoration of movement. Toward Brain-computer Interfacing: 161. |
| [51] | Dang N-T (2007) A survey and classification of 3D pointing techniques. IEEE International Conference on Research, Innovation and Vision for the Future: 71–80. |
| [52] | Douglas DB, Wilke CA, Gibson D, et al. (2017) Virtual reality and augmented reality: Advances in surgery. Biol 2: 1–8. |
| [53] | Hinckley K, Pausch R, Goble JC, et al. (1994) Passive real-world interface props for neurosurgical visualization. Human Factors in Computing Systems: 452–458. |
| [54] | David Douglas MDCW, M.S.; David Gibson, M.S.; Emanuel Petricoin, Ph.D.; Lance Liotta, Ph.D.; Demetri Venets, B.S.; Buddy Beck, M.B.A.; Robert Douglas, Ph.D. (2018) Depth-3-Dimensional (D3D) Augmented Reality Viewing of a Lung Cancer Imaged with PET: Proof of Concept. SNMMI Mid-Winter Meeting 2018. Orlando, FL. |
Figures(6)

David B. Douglas, Robert E. Douglas, Cliff Wilke, David Gibson, John Boone, Max Wintermark. A systematic review of 3D cursor in the medical literature[J]. AIMS Electronics and Electrical Engineering, 2018, 2(1): 1-11. doi: 10.3934/ElectrEng.2018.1.1







 DownLoad:
DownLoad: