Citation: C. Zwanenburg, G. Erkens. Uitdam, the Netherlands: test site for soft fibrous peat[J]. AIMS Geosciences, 2019, 5(4): 804-830. doi: 10.3934/geosci.2019.4.804

| [1] | CBS (2019) Available from: www.cbs.nl/nl-nl/visualisaties/bevolkingsteller. |
| [2] | Erkens G, Van den Berg M, Griffioen J (2011) Veen en Geo-informatievoorziening door TNO-Overzicht van het informatiegebruik en aanbevelingen voor verbetering van de informatievoorziening en-verzameling over veen in de ondergrond. TNO-rapport, TNO-060-UT-2011-01127 A, 54. |
| [3] |
Zwanenburg C, Jardine RJ (2015) Laboratory, in situ and full-scale load tests to assess flood embankment stability on peat. Géotechnique 65: 309-326. doi: 10.1680/geot.14.P.257

|
| [4] | Zwanenburg C, Van MA (2013) Full scale field tests for strength assessment of peat. In Proceedings of the 18th International Conference on Soil Mechanics and Geotechnical Engineering, Paris. |
| [5] | Zwanenburg C, Van MA (2015) Comparison between conventional and large scale triaxial tests on peat. In Manzanal D, Sfriso AO, eds, 15th Pan American Conference on Soil Mechanics and Geotechnical engineering, Buenos Aires, IOS Amsterdam. |
| [6] | Begemann HKS (1971) Soil sampler for taking undisturbed sample 66mm in diameter and with a maximum length of 17 m. In Proceedings 4th Asian ISSMFE conference specialty session quality in soil sampling, Bangkok, 54-57. |
| [7] | Den Haan EJ, Kruse GAM (2007) Characterisation and engineering properties of Dutch peats. In Second international workshop on characterisation and engineering of natural soils Singapore, London Taylor & Francis, 3: 2101-2133. |
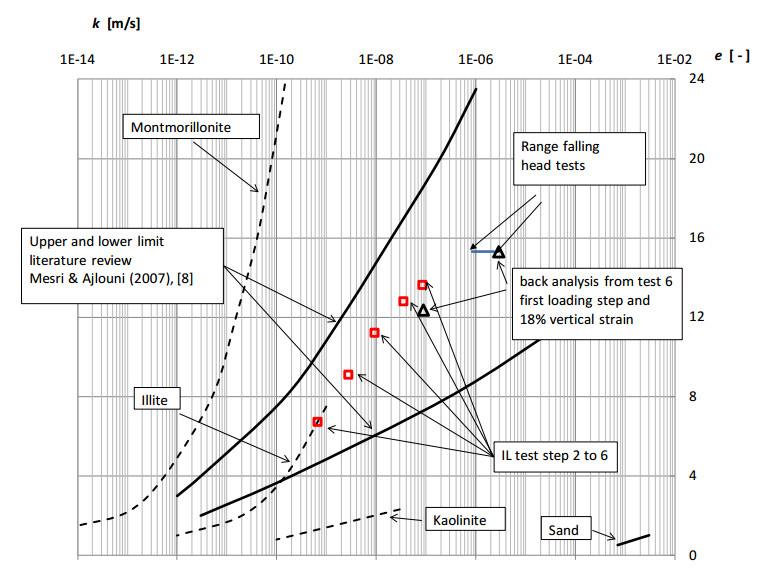
| [8] | Mesri G, Ajlouni M (2007) Engineering properties of fibrous peats. J Geotech Geoenviron Eng 133: 850-866. |
| [9] | Edil TB (2001) Site Characterization in Peat and Organic Soils. Proceedings of International Conference on In Situ Measurement of Soil Properties and Case Histories, Bali, 49-59. |
| [10] | Helenelund KV (1967) Vane tests and tension tests on fibrous peats. In Proceedings of the Geotechnical Conference on Shear Strength Properties of Natural Soils and Rocks, Oslo Norway, Balkema, Rotterdam, the Netherlands, 19-22. |
| [11] | Landva AO (2007) Characterization of Escuminac peat and construction on peatland. In Tan TS, Phoon KK, Hight DW, et al. (eds), Characterisation and Engineering Properties of Natural Soils, Taylor& Fransic Group London. |
| [12] | Boylan N, Long M (2014) Evaluation of peat strength for stability assessments. Geotech Eng 167: 421-430. |
| [13] |
Hobbs NB (1986) Mire Morphology and the properties and behaviour of some British and foreign peats. Q J Eng Geol 19: 7-80. doi: 10.1144/GSL.QJEG.1986.019.01.02
|
| [14] | CROW (Centrum voor Regelgeving en Onderzoek Grond-, Water-, en Wegenbouw) (2015) standaard RAW bepalingen, proef 28 (in Dutch). |
| [15] |
Skempton AW, Petley DJ (1970) Ignition loss and other properties of peats and clays from Avonmouth, King's Lynn and Cranberry Moss. Géotechnique 20: 343-356. doi: 10.1680/geot.1970.20.4.343
|
| [16] | Becker DE, Crooks JHA, Been K, et al. (1987) Work as a criterion for determining in situ and yield stress in clays. Can Geotech J 24: 549-564. |
| [17] | Azzouz AMRS, Krizek RJ, Corotis RB (1976) Regression analysis of soil compressibility. Soils Found 16: 19-29. |
| [18] | Casagrande A, Fadum RE (1940) Notes on soil testing for engineering purposes. Harvard Graduate School of Engineering, Soil Mechanics Series No 8, 74. |
| [19] | ASTM D2435/D2435M-11 (2011) Standard Test Methods for One-Dimensional Consolidation Properties of Soils Using Incremental Loading, ASTM International West Conshohocken, USA. |
| [20] | Taylor DW (1942) Research on consolidation of clays. Massachusetts Institute of Technology, department of civil engineering, serial no 82. |
| [21] | Tavenas F, Jean P, Leblond JP, et al. (1983) The permeability of natural soft clays: part Ⅱ: permeability characteristics. Can Geotech J 20: 645-660. |
| [22] | Yamaguchi H, Ohira Y, Kogure K, et al. (1985) Undrained chear characteristics of normally consolidated peat under triaxial compression. Soils Found 25: 1-18. |
| [23] |
Zwanenburg C, Den Haan EJ, Kruse GAM, et al. (2012) Failure of a trial embankment on peat in Booneschans, the Netherlands. Géotechnique 62: 479-490. doi: 10.1680/geot.9.P.094
|
| [24] |
Hendry MT, Sharma JS, Martin CD, et al. (2012) Effect of fibre content and structure on anisotropic elastic stiffness and shear strength of peat. Can Geotech J 49: 403-415. doi: 10.1139/t2012-003
|
| [25] | O'Kelly BC (2017) Measurement, interpretation and recommended use of laboratory strength properties of fibrous peat. Geotech Res 4: 136-171. |
| [26] |
Dyvik R, Lacasse S, Berre T, et al. (1987) Comparison of truly undrained and constant volume direct simple shear tests. Géotechnique 37: 3-10. doi: 10.1680/geot.1987.37.1.3
|
| [27] | Ladd CC, Foot R (1974) New design procedure for stability of soft clays. J Geotech Eng Div 100: 763-786. |
| [28] | Zwanenburg C (2017) The development of a large diameter sampler. In Proceedings of the 19th International Conference on Soil Mechanics and Geotechnical Engineering, Seoul. |
| [29] | Lunne T, Robertson PK, Powell JJM (1997) Cone Penetration Testing in geotechnical practice, Blackie Academic & Professional London. |
| [30] | Boylan N, Long M, Mathijssen F (2011) In situ strength characterisation of peat and organic soil using full-flow penetrometers. Can Geotech J 48: 1085-1099. |
| [31] | NEN (2013) NEN EN-ISO 22476-1:2012, IDT Geotechnical investigation and testing-Field testing-Part1: electrical cone and piezocone penetration test. Delft, the Netherlands, NEN. |
| [32] | Boylan N, Mathijssen F, Long M, et al. (2008) Accuracy of piezocone testing in organic soils. In Proceedings of the 11th Baltic Sea Geotechnical Conference, Gdansk Poland, 1: 367-375. |
| [33] | Schneider JA, Randolph MF, Mayne PW, et al. (2008) Analysis of factors influencing soil classification using normalized piezocone tip resistance and pore pressure parameters. J Geotech Geoenviron Eng 134: 1569-1586. |
| [34] | Morris PH, Williams DJ (2000) A revision of Blight's model of field vane testing. Can Geotech J 37: 1089-1098. |
| [35] | Bjerrum L (1973) Problems of soil mechanics and construction on soft clays and structurally unstable soils (collapsible, expansive and others). Proc. 8th ICSMFE, Moscow, 3: 111-159. |

Figures(21) / Tables(6)

C. Zwanenburg, G. Erkens. Uitdam, the Netherlands: test site for soft fibrous peat[J]. AIMS Geosciences, 2019, 5(4): 804-830. doi: 10.3934/geosci.2019.4.804







 DownLoad:
DownLoad: