Citation: Venetia D. Lyles, Wilson K. Serem, Erhong Hao, M. Graça H. Vicente, Jayne C. Garno. Characterization of designed cobaltacarborane porphyrins using conductive probe atomic force microscopy[J]. AIMS Materials Science, 2016, 3(2): 380-389. doi: 10.3934/matersci.2016.2.380

| [1] |
Fox MA (1999) Fundamentals in the Design of Molecular Electronic Devices: Long- Range Charge Carrier Transport and Electronic Coupling. Acc Chem Res 32: 201–207. doi: 10.1021/ar9600953

|
| [2] |
Liu C-Y, Pan H-L, Fox MA, et al. (1993) High-Density Nanosecond Charge Trapping in Thin-Films of the Photoconductor ZnODEP. Science 261: 897–899. doi: 10.1126/science.261.5123.897
|
| [3] |
Adams DM, Kerimo J, Liu C-Y, et al. (2000) Electric field modulated near-field photo-luminescence of organic thin films. J Phys Chem B 104: 6728–6736. doi: 10.1021/jp994457a
|
| [4] |
Kimura M, Saito Y, Ohta K, et al. (2002) Self-Organization of Supramolecular Complex Composed of Rigid Dendritic Porphyrin and Fullerene. J Am Chem Soc 124: 5274–5275. doi: 10.1021/ja012614p
|
| [5] |
Burrows HD, Gonsalves AMR, Leitao MLP, et al. (1997) Phase transitions and self-assembly in meso-tetrakis(undecyl)porphyrin. Supramolec Sci 4: 241–246. doi: 10.1016/S0968-5677(97)00010-2
|
| [6] |
Tsuda A, Osuka A (2001) Fully Conjugated Porphyrin Tapes with Electronic Absorption Bands That Reach into Infrared. Science 293: 79–82. doi: 10.1126/science.1059552
|
| [7] | Reimers JR, Hall LE, Crossley MJ, et al. (1999) Rigid fused Oligoporphyrins as Potential Versatile Molecular Wires. 2. B3LYP and SCF Calculated Geometric and Electronic Properties of 98 Oligoporphyrin and Related Molecules. J Phys Chem A 103: 4385–4397. |
| [8] |
Jiao J, Anariba F, Tiznado H, et al. (2006) Stepwise Formation and Characterization of Covalently Linked Multiporphyrin-Imid Architectures on Si(100). J Am Chem Soc 128: 6965–6974. doi: 10.1021/ja060906q
|
| [9] | Roth KM, Liu Z, Gryko DT, et al. (2003) Charge-Retention Characteristics of Self-Assembled Monolayers of Molecular-Wire-Linked Porphyrins on Gold (Chapter 5). In: Lieberman M, editor. Molecules as Components of Electronic Devices. Washington DC: Oxford University Press. |
| [10] |
Liu C-Y, Pan HL, Fox MA, et al. (1997) Reversible charge trapping/detrapping in a photoconductive insulator of liquid crystal zinc porphyrin. Chem Mater 9: 1422–1429. doi: 10.1021/cm970039b
|
| [11] | Roth KM, Dontha N, Dabke RB, et al. (2000) Molecular approach toward information storage based on the redox properties of porphyrins in self-assembled monolayers. J Vac Sci Technol 18: 2359–2364. |
| [12] |
Malinski T, Taha Z (1992) Nitric-Oxide Release from a Single Cell Measured In Situ by a Porphyrinic-Based Microsensor. Nature 358: 676–678. doi: 10.1038/358676a0
|
| [13] | Filippini D, Alimelli A, Natale CD, et al. (1999) Chemical Sensing with Familiar Devices. Angew Chem Int Ed 45: 3800–3803. |
| [14] |
Maree CHM, Roosendaal SJ, Savenije TJ, et al. (1996) Photovoltaic effects in porphyrin polymer films and heterojunctions. J Appl Phys 80: 3381–3389. doi: 10.1063/1.363203
|
| [15] |
Murata K, Ito S, Takahashi K, et al. (1997) Photocurrent from photocorrosion of aluminum electrode in porphyrin/Al Schottky-barrier cells. Appl Phys Lett 71: 674–676. doi: 10.1063/1.119826
|
| [16] |
Harima Y, Okazaki H, Kunugi Y, et al. (1996) Formation of Schottky barriers at interfaces between metals and molecular semiconductors of p- and n-type conductances. Appl Phys Lett 69: 1059–1061. doi: 10.1063/1.116930
|
| [17] |
Chowdhury A, Chowdhury J, Pal P, et al. (1998) Light-emitting diodes from molecularly thin porphyrin derivative: Effect of molecular packing. Solid State Commun 107: 725–729. doi: 10.1016/S0038-1098(98)00289-0
|
| [18] |
Baldo MA, O'Brien DF, You Y, et al. (1998) Highly efficient phosphorescent emission from organic electroluminescent devices. Nature 395: 151–154. doi: 10.1038/25954
|
| [19] |
Kwong RC, Sibley S, Dubovoy T, et al. (1999) Efficient, saturated red organic light emitting devices based on phosphorescent platinum(II) porphyrins. Chem Mater 11: 3709–3713. doi: 10.1021/cm9906248
|
| [20] |
Sendt K, Johnston LA, Hough WA, et al. (2002) Switchable Electronic Coupling in Model Oligoporphyrin Molecular Wires Examined through the Measurement and Assignment of Electronic Absorption Spectra. J Am Chem Soc 124: 9299–9309. doi: 10.1021/ja020081u
|
| [21] |
Reimers JR, Lu TX, Crossley MJ, et al. (1996) Molecular electronic properties of fused rigid porphyrin-oligomer molecular wires. Chem Phys Lett 256: 353–359. doi: 10.1016/0009-2614(96)00435-6
|
| [22] |
Robertson N, McGowan CA (2003) A comparison of potential molecular wires as components for molecular electronics. Chem Soc Rev 32: 96–103. doi: 10.1039/b206919a
|
| [23] |
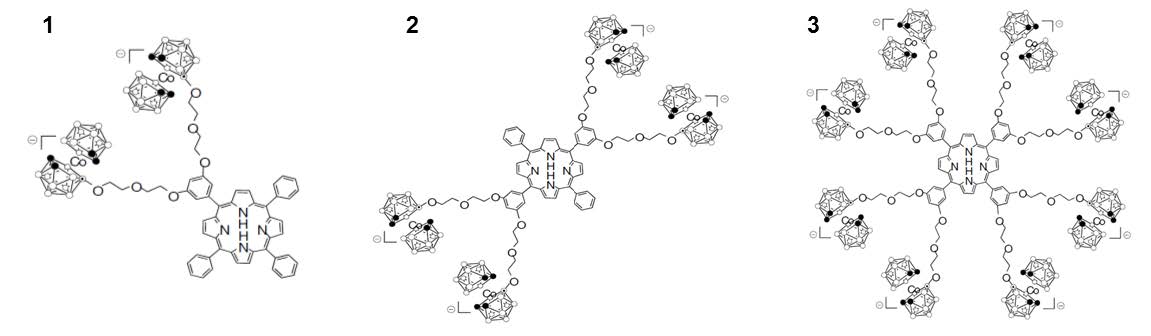
Hao E, Jensen TJ, Courtney BH, et al. (2005) Synthesis and cellular studies of porphyrin−cobaltacarborane conjugates. Bioconjugate Chem 16: 1495–1502. doi: 10.1021/bc0502098
|
| [24] | Hao E, Sibrian-Vazquez M, Serem W, et al. (2007) Synthesis, aggregation and cellular investigations of porphyrin–cobaltacarborane conjugates. Chem A Eur J 13: 9035–9042. |
| [25] |
Hao E, Zhang M, E W, et al. (2008) Synthesis and spectroelectrochemistry of N-cobaltacarborane porphyrin conjugates. Bioconjugate Chem 19: 2171–2181. doi: 10.1021/bc800265w
|
| [26] | Hao E, Vicente MGH (2005) Expeditious synthesis of porphyrin-cobaltacarborane conjugates. Chem Commun 1306–1308. |
| [27] |
Sibrian-Vazquez M, Hao E, Jensen TJ, et al. (2006) Enhanced cellular uptake with a cobaltacarborane−porphyrin−HIV-1 Tat 48−60 conjugate. Bioconjugate Chemistry 17: 928–934. doi: 10.1021/bc060047v
|
| [28] |
Friedbacher G, Fuchs H (1999) Classification of scanning probe microscopies - (Technical report). Pure Appl Chem 71: 1337–1357. doi: 10.1351/pac199971071337
|
| [29] |
Ogunrinde A, Hipps KW, Scudiero L (2006) A scanning tunneling microscopy study of self-assembled nickel(II) octaethylporphyrin deposited from solutions on HOPG. Langmuir 22: 5697–5701. doi: 10.1021/la060233p
|
| [30] |
Palermo V, Palma M, Samori P (2006) Electronic characterization of organic thin films by Kelvin probe force microscopy. Adv Mater 18: 145–164. doi: 10.1002/adma.200501394
|
| [31] |
Kronik L, Shapira Y (1999) Surface photovoltage phenomena: theory, experiment, and applications. Surf Sci Rep 37: 1–206. doi: 10.1016/S0167-5729(99)00002-3
|
| [32] |
Matey JR, Blanc J (1985) Scanning capacitance microscopy. J Appl Phys 57: 1437–1444. doi: 10.1063/1.334506
|
| [33] | Xu S, Arnsdorf MF (1995) Electrostatic force microscope for probing surface charges in aqueous solutions. Proc Natl Acad Sci 92: 10384–10388. |
| [34] |
Afsharimani N, Nysten B (2013) Scanning probe microscopy study of electronic properties in alkyl-substituted oligothiophene-based field-effect transitors. Vacuum 90: 17–24. doi: 10.1016/j.vacuum.2012.09.014
|
| [35] |
Jean MS, Hudlet S, Guthmann C, et al. (1999) Van der Waals and capacitive forces in atomic force microscopies. J Appl Phys 86: 5245–5248. doi: 10.1063/1.371506
|
| [36] | Kodera M, Yoshimizu Y, Uchida K (2012) Potential Characterization of Interconnect Corrosion by Kelvin Probe and Electrostatic Force Microscopies. Japan J Appl Phys 51. |
| [37] | Necas D, Klapetek P (2012) Gwyddion: an open-source software for SPM data analysis. Cent Eur J Phys 10: 181–188. |
| [38] | Hao E (2007) Syntheseses and evaluation of porphyrin derivatives for applications in medicine and in material science. Baton Rouge, LA: Dissertation, Louisiana State University. |
| [39] |
Matsumoto K, Ishii M, Segawa K, et al. (1996) Room temperature operation of a single electron transistor made by the scanning tunneling microscope nanooxidation process for the TiOx/Ti system. Appl Phys Lett 68: 34–36. doi: 10.1063/1.116747
|
| [40] |
Kim TW, Choo DC, Shim JH, et al. (2001) Nanocrystals acting as Coulomb islands operating at room temperature created using a focused ion-beam process. Appl Phys Lett 79: 120–122. doi: 10.1063/1.1378052
|
| [41] |
Wakayama Y, Kubota T, Suzuki H, et al. (2003) Molecular Coulomb islands for single-electron tunneling in SiO2/molecular layer/SiO2 multilayers on Si(100). J Appl Phys 94: 4711–4713. doi: 10.1063/1.1605249
|
Figures(5)

Venetia D. Lyles, Wilson K. Serem, Erhong Hao, M. Graça H. Vicente, Jayne C. Garno. Characterization of designed cobaltacarborane porphyrins using conductive probe atomic force microscopy[J]. AIMS Materials Science, 2016, 3(2): 380-389. doi: 10.3934/matersci.2016.2.380







 DownLoad:
DownLoad: