Citation: Judith S. Weis. Improving microplastic research[J]. AIMS Environmental Science, 2019, 6(5): 326-340. doi: 10.3934/environsci.2019.5.326

| [1] |
Courtene-Jones W, Quinn B, Gary S, et al. (2017) Microplastic pollution identified in deep-sea water and ingested by benthic invertebrates in the Rockasll Trough, North Atlantic Ocean. Environ Poll 231: 271–280. doi: 10.1016/j.envpol.2017.08.026

|
| [2] | Sanchez-Vidal A, Thompson R, Canala M, et al. (2018) The imprint of microfibres in Southern European deep seas. PLoS ONE 13: e0207033 |
| [3] |
Mason S, Kammin L, Eriksen M, et al. (2016) Pelagic plastic pollution within the surface waters of Lake Michigan, USA. J Great Lakes Res 42: 753–759. doi: 10.1016/j.jglr.2016.05.009
|
| [4] |
Schymanski D, Goldbeck C, Humpf HU, et al. (2018) Analysis of microplastics in water by micro-Raman spectroscopy: Release of plastic particles from different packaging into mineral water. Water Res 129: 154–162. doi: 10.1016/j.watres.2017.11.011
|
| [5] |
Dris RJ, Gaspari J, Saad M, et al. (2016) Synthetic fibers in atmospheric fallout: a source of microplastics in the environment? Mar Poll Bull 104: 290–293. doi: 10.1016/j.marpolbul.2016.01.006
|
| [6] |
Dris RJ, Gaspari J, Mirande C, et al. (2017) A first overview of textile fibers, including microplastics, in indoor and outdoor environments. Environ Pol 221: 453–458. doi: 10.1016/j.envpol.2016.12.013
|
| [7] |
Allen S, Allen D, Phoenix V, et al. (2019) Atmospheric transport and deposition of microplastics in a remote mountain catchment. Nature Geosci 12: 339–344. doi: 10.1038/s41561-019-0335-5
|
| [8] |
Zhang G, Zhang F, Li X (2019) Effects of polyester microfibers on soil physical properties: Perception from a field and pot experiment. Sci Total Envir 670: 1–7. doi: 10.1016/j.scitotenv.2019.03.149
|
| [9] | Hidalgo-Ruz V, Gutow L, Thompson R, et al. (2013) Microplastics in the marine environment: a review of the methods used for identification and quantification. Envir Sci Tech46: 3060–3075. |
| [10] | GESAMP (2019) Guidelines or the monitoring and assessment of plastic litter and microplastics in the ocean (Kershaw P.J, Turra A. and Galgani F. editors), (IMO/FAO/UNESCO-IOC/UNIDO/WMO/IAEA/UN/UNEP/UNDP/ISA Joint Group of Experts on the Scientific Aspects of Marine Environmental Protection). Rep. Stud. GESAMP No. 99, 130p |
| [11] |
Horton A, Walton A, Spurgeon D, et al. (2017) Microplastics in freshwater and terrestrial environments: Evaluating the current understanding to identify the knowledge gaps and future research priorities. Sci Total Environ 586: 127–141. doi: 10.1016/j.scitotenv.2017.01.190
|
| [12] |
Liu D, Wang X, Fang T, et al. (2019) Source and potential risk assessment of suspended atmospheric microplastics in Shanghai. Sci Total Environ 675: 462–471. doi: 10.1016/j.scitotenv.2019.04.110
|
| [13] | Bosker T, Bouwman L, Brun N, et al. (2019) Microplastics accumulate on pores in seed capsule and delay germination and root growth of the terrestrial vascular plant Lepidium sativum Chemosphere 226: 774–781. |
| [14] |
Rocha-Santos T, Duarte A (2015) A critical overview of the analytical approaches to the occurrence, the fate and the behavior of microplastics in the environment. Trends Analyt Chem 65: 47–53. doi: 10.1016/j.trac.2014.10.011
|
| [15] |
Green D, Kregting L, Boots B, et al. (2018) A comparison of sampling methods for seawater microplastics and a first report of the microplastic litter in coastal waters of Ascension and Falkland Islands. Mar Poll Bull 137: 695–701. doi: 10.1016/j.marpolbul.2018.11.004
|
| [16] |
Burns E, Boxall A (2018) Microplastics in the aquatic environment: Evidence for or against adverse impacts and major knowledge gaps. Envir Toxicol Chem 37: 2776–2796. doi: 10.1002/etc.4268
|
| [17] |
Carr SA (2017) Sources and dispersive modes of microfibers in the environment. Integr Environ Assess Mgmt 13: 466–469. doi: 10.1002/ieam.1916
|
| [18] |
Constant M, Kerherve P, Mino-Vercello-Verollet M, et al. (2019) Beached microplastics in the northwestern Mediterranean Sea. Mar Poll Bull 142: 263–273. doi: 10.1016/j.marpolbul.2019.03.032
|
| [19] |
Browne MA, Crump P, Nivenet SJ, et al. (2011) Accumulation of Microplastic on Shorelines Worldwide: Sources and Sinks. Environ Sci Technol 45: 9175–9179. doi: 10.1021/es201811s
|
| [20] | IUCN: Boucher J, Friot D (2017) Primary Microplastics in the Oceans: A Global Evaluation of Sources. Gland, Switzerland: IUCN. 43pp. |
| [21] |
Rochman C, Brookman C, Bikker J, et al. (2019) Rethinking microplastics as a diverse contaminant suite. Envir Toxicol Chem 38: 703–711. doi: 10.1002/etc.4371
|
| [22] | Taylor M.L, Gwinnett C, Robinson L, et al. (2016) Plastic microfibre ingestion by deep-sea organisms. Sci Rept 6 article 33997. |
| [23] |
Murray F, Cowie P (2011) Plastic contamination in the decapod crustacean Nephrops norvegicus (Linnaeus 1758). Mar Poll Bull 62: 1207–1217. doi: 10.1016/j.marpolbul.2011.03.032
|
| [24] |
Ory N, Sobral P, Ferreira M, et al. (2017) Amberstripe scad Decapterus muroadsi (Carangidae) fish ingest blue microplastics resembling their copepod prey along the coast of Rapa Nui (Easter Island) in the South Pacific subtropical gyre. Sci Total Envir 586: 430–437. doi: 10.1016/j.scitotenv.2017.01.175
|
| [25] |
Savoca MS, Tyson CW, McGill M, et al. (2017) Odours from marine plastic debris induce food search behaviours in a forage fish. Proc. R. Soc. B 284: 20171000. http://dx.doi.org/10.1098/rspb.2017.1000. doi: 10.1098/rspb.2017.1000
|
| [26] |
Allen AS, Seymour A, Rittschof D (2017) Chemoreception drives plastic consumption in a hard coral. Mar Poll Bull 124: 198–205. doi: 10.1016/j.marpolbul.2017.07.030
|
| [27] |
Richard H, Carpenter E, Komada T, et al. (2019) Biofilm facilitates metal accumulation onto microplastics in estuarine waters. Sci Total Environ 683: 600–608. doi: 10.1016/j.scitotenv.2019.04.331
|
| [28] |
Kettner MT, Oberbeckmann S, Labrenz M, et al. (2019) The eukaryotic life of microplastics in brackish environments. Front Microbiol 10: 1–13 doi: 10.3389/fmicb.2019.00001
|
| [29] |
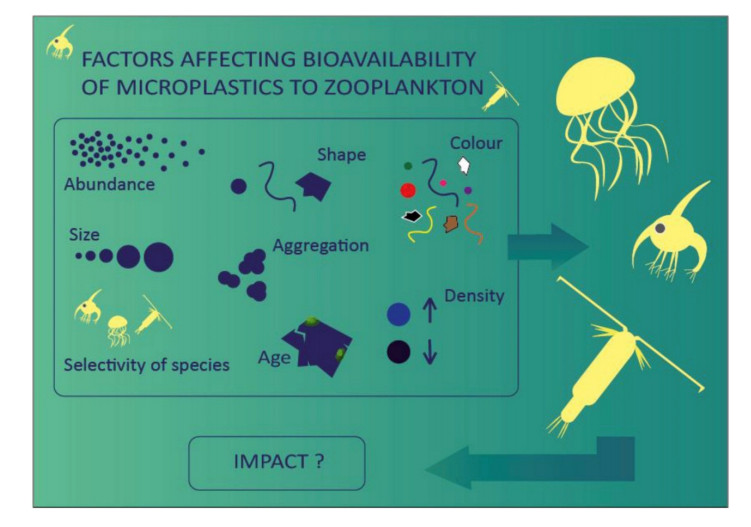
Botterell Z, Beaumont N, Dorrington T, et al. (2019) Bioavailability and effects of microplastics on marine zooplankton: A review. Environ Poll 245: 98–110. doi: 10.1016/j.envpol.2018.10.065
|
| [30] |
de Orte MS, Clowez S, Caldeira K (2019) Response of bleached and symbiotic sea anemones to plastic microfiber exposure. Environ Poll 249: 512–517. doi: 10.1016/j.envpol.2019.02.100
|
| [31] |
Cole M, Lindeque P, Fileman E, et al. (2013) Microplastic ingestion by zooplankton. Envir Sci Tech 47: 6646–6655. doi: 10.1021/es400663f
|
| [32] |
Mohsen M, Wang Q, Zhang L, et al. (2019) Microplastic ingestion by the farmed sea cucoumber Apostichopus japonicus in China. Environ Pollut 245: 1071–1078. doi: 10.1016/j.envpol.2018.11.083
|
| [33] |
Grigorakus S, Mason S, Drouillard K (2017) Determination of the gut retention of plastic microbeads and microfibers in goldfish (Carassius auratus). Chemosphere 169: 233–238. doi: 10.1016/j.chemosphere.2016.11.055
|
| [34] |
Besseling E, Wegner A, Foekema EM, et al. (2013) Effects of microplastics on fitness and PCB bioaccumulation by the lugworm Arenicola marina (L.). Environ Sci Tech 47: 593–600. doi: 10.1021/es302763x
|
| [35] |
Setälä O, Fleming-Lehtinen V, Lehtiniemi M (2014) Ingestion and transfer of microplastics in the planktonic food web. Environ Poll 185: 77–83. doi: 10.1016/j.envpol.2013.10.013
|
| [36] |
Woods M, Stack M, Fields D, et al. (2018) Microplastic fiber uptake, ingestion, and egestion rates in blue mussel (Mytilus edulis). Mar Poll Bull 137: 638–645. doi: 10.1016/j.marpolbul.2018.10.061
|
| [37] |
Li L, Cai H, Rochman C, et al. (2019) The uptake of microfibers by freshwater Asian clams (Corbicula fluminea) varies based upon physicochemical properties. Chemosphere 221: 107–114. doi: 10.1016/j.chemosphere.2019.01.024
|
| [38] |
Watts AJ, Urbina MA, Goodhead R, et al. (2016) Effect of microplastic on the gills of the shore crab Carcinus maenas. Environ Sci Technol 50: 5364–5369. doi: 10.1021/acs.est.6b01187
|
| [39] |
Lu Y, Zhang Y, Deng Y, et al. (2016) Uptake and accumulation of polystyrene microplastics in zebrafish (Danio rerio) and toxic effects in liver. Envir Sci Tech 50: 4054–4060. doi: 10.1021/acs.est.6b00183
|
| [40] |
Collard F, Gilbert B, Compere P, et al. (2017) Microplastics in the livers of European anchovies (Engraulis encrasicolus L.). Environ Poll 229: 1000–1005. doi: 10.1016/j.envpol.2017.07.089
|
| [41] |
Rosenkrantz P, Chaudhry Q, Stone V, et al. (2009) A comparison of nanoparticle and fine particle uptake by Daphnia magna. Environ Toxicol Chem 28: 2142–2149. doi: 10.1897/08-559.1
|
| [42] | Schür C, Rist S, Baun A, et al. (2019) When fluorescence is not a particle: The tissue translocation of microplastics in Daphnia magna seems an artifact. Environ Toxicol Chem |
| [43] | Farrell P, Nelson K (2013) Trophic level transfer of microplastic: Mytilus edulis (L.) to Carcinus maenas (L.). Envir Poll 177: 1–3. |
| [44] |
Santana M, Moreira F, Turra A (2017) Trophic transference of microplastics under a low exposure scenario: insights on the likelihood of particle cascading along marine food webs. Mar Poll Bull 121: 154–159. doi: 10.1016/j.marpolbul.2017.05.061
|
| [45] |
Haegerbaeumer A, Mueller MT, Fueser H, et al. (2019) Impacts of micro-and nano-sized plastic particles on benthic invertebrates: A literature review and gap analysis. Front Envir Sci 7: 17. doi: 10.3389/fenvs.2019.00017
|
| [46] | Rillig M, Ziersch L, Hempel S (2017) Microplastic transport in soil by earthworms. Sci Reports 7. Article number 1362. |
| [47] |
Zhu F, Zhu C, Wang C, et al. (2019) Occurrence and ecological impacts of microplastics in soil systems: A review. Bull Environ Contam Toxicol 102: 741–749. doi: 10.1007/s00128-019-02623-z
|
| [48] |
Prendergast-Miller M, Katsiamides A, Abbass, M, et al. (2019) Polyester-derived microfibre impacts on the soil dwelling earthworm, Lumbricus terrestris. Environ Pollut 251: 453–459. doi: 10.1016/j.envpol.2019.05.037
|
| [49] | Lwanga E, Gertsen H, Gooren H (2016) Microplastics in the terrestrial ecosystem: Implications for Lumbricus terrestris (Oligochaeta, Lumbricidae). Environ Sci Tech 505: 2685–2691. |
| [50] |
Green D, Colgan T, Thompson R, et al. (2019) Exposure to microplastics reduces attainment strength and alters the haemolymph proteome of blue mussels (Mytilus edulis). Envir Poll 246: 423–434. doi: 10.1016/j.envpol.2018.12.017
|
| [51] |
Au S, Bruce T, Bridges W (2015) Responses of Hyalella azteca to acute and chronic microplastic exposures. Environ Toxicol Chem 34: 2564–2572. doi: 10.1002/etc.3093
|
| [52] |
Jovanovic B (2017) Ingestion of microplastic by fish and its potential consequences from a physical perspective. Integr Environ Assess Managmt 13: 510–515. doi: 10.1002/ieam.1913
|
| [53] |
Bour A, Haarr A, Keiter S, et al. (2018) Environmentally relevant microplastic exposure affects sediment-dwelling bivalves. Envir Poll 236: 652–660. doi: 10.1016/j.envpol.2018.02.006
|
| [54] |
Ziajahromi S, Kumar A, Neale P, et al. (2017) Impact of microplastic beads and fibers on waterflea (Ceriodaphnia dubia) survival, growth, and reproduction: Implications of single and mixture exposures. Environ Sci Technol 51: 13397–13406. doi: 10.1021/acs.est.7b03574
|
| [55] | Foley CJ, Feiner ZS, Malinich TD, et al. (2018) A meta-analysis of the effects of exposure to microplastics on fish and aquatic invertebrates. Sci Total Envir 631–632: 550–559. |
| [56] | Rochman C, Hoh E, Hentschel B, et al. (2013) Long-term field measurement of sorption of organic contaminants to five types of plastic pellets: implications for plastic marine debris. Environ Sci Tech 47: 1646–1654. |
| [57] |
Rochman C, Hoh E, Kurobe T, et al. (2013) Ingested plastic transfers hazardous chemicals to fish and induces hepatic stress. Sci Rep 3: 3263. doi: 10.1038/srep03263
|
| [58] |
Rochman C, Hentschel B, Teh S (2014) Long-term sorption of metals is similar among plastic types: implications for plastic debris in aquatic environments. PloS One 9: e85433. doi: 10.1371/journal.pone.0085433
|
| [59] |
Seuront L (2018) Microplastic leachates impair behavioural vigilance and predator avoidance in a temperate intertidal gastropod. Biol Lett 14: 20180453. doi: 10.1098/rsbl.2018.0453
|
| [60] |
Pannetier P, Morin B, Clérandeau C, et al. (2019) Toxicity assessment of pollutants sorbed on environmental microplastics collected on beaches: Part II – adverse effects on Japanese medaka early life stages. Environ Poll 248: 1098–1107. doi: 10.1016/j.envpol.2018.10.129
|
| [61] |
Wardrop P, Shimeta J, Nugegoda D, et al. (2016) Chemical pollutants sorbed to ingested microbeads from personal care products accumulate in fish. Environ Sci Technol 50: 4037–4044. doi: 10.1021/acs.est.5b06280
|
| [62] |
Beckingham B, Ghosh U (2017) Differential bioavailability of polychlorinated biphenyls associated with environmental particles: Microplastic in comparison to wood, coal and biochar. Environ Poll 220: 150–158. doi: 10.1016/j.envpol.2016.09.033
|
| [63] | Hodson M, Duffus-Hodson C, Clark A (2017) Plastic bag derived microplastics as a vector for metal exposure in terrestrial invertebrates. Environ Sci Tech 518: 4714–4721. |
| [64] |
Tourinho P, Koci V, Loureiro S, et al. (2019) Partitioning of chemical contaminants to microplastics: Sorption mechanisms, environmental distribution and effects on toxicity and bioaccumulation. Envir Pollut 252: 1246–1256. doi: 10.1016/j.envpol.2019.06.030
|
| [65] |
Batel A, Linti F, Scherer M, et al. (2016) Transfer of benzo [a] pyrene from microplastics to Artemia nauplii and further to zebrafish via a trophic food web experiment: CYP1A induction and visual tracking of persistent organic pollutants. Environ Toxicol Chem 35: 1656–1666. doi: 10.1002/etc.3361
|
| [66] |
Bakir A, Rowland S, Thompson R (2014) Enhanced desorption of persistent organic pollutants from microplastics under simulated physiological conditions. Environ Poll 185: 16–23. doi: 10.1016/j.envpol.2013.10.007
|
| [67] |
Bakir A, O'Connor I, Rowland S, et al. (2016) Relative importance of microplastics as a pathway for the transfer of hydrophobic organic chemicals to marine life. Environ Poll 219: 56–65. doi: 10.1016/j.envpol.2016.09.046
|
| [68] |
Ziajahromi S, Kumar A, Neale P (2019) Effects of polyethylene microplastics on the acute toxicity of a synthetic pyrethroid to midge larvae (Chironomus tepperi) in synthetic and river water. Sci Total Envir 671: 971–975. doi: 10.1016/j.scitotenv.2019.03.425
|
| [69] |
Wang J, Coffin S, Sun C, et al. (2019) Negligible effects of microplastics on animal fitness and HOC bioaccumulation in earthworm Eisenia fetida in soil. Environ Pollut 249: 776–784. doi: 10.1016/j.envpol.2019.03.102
|
| [70] |
McIlwraitha H, Lina J, Erdleb L, et al. (2019) Capturing microfibers – marketed technologies reduce microfiber emissions from washing machines. Mar Poll Bull 139: 40–45. doi: 10.1016/j.marpolbul.2018.12.012
|
| [71] | Weis JS (2018) Cooperative work is needed between textile scientists and environmental scientists to tackle the problems of pollution by microfibers. J Textile Apparel Tech Mgmt 10: 1–3. |
| [72] |
Almroth B, Åström L, Roslund S, et al. (2018) Quantifying shedding of synthetic fibers from textiles; a source of microplastics released into the environment. Envi Sci Poll Res 25: 1191–1199. doi: 10.1007/s11356-017-0528-7
|
| [73] |
Zambrano M, Pawlak J, Daystar J, et al. (2019) Microfibers generated from the laundering of cotton, nylon, and polyester based fabrics and their aquatic degradation. Mar Poll Bull 142: 394–407. doi: 10.1016/j.marpolbul.2019.02.062
|
| [74] |
Belzagui F, Crespi M, Álvarez A, et al. (2019) Microplastics' emission: microfibers' detachment from textile garments. Envir Poll 248: 1028–1035. doi: 10.1016/j.envpol.2019.02.059
|
| [75] |
Pena-Francesch A, Demirel M (2019) Squid-inspired tandem repeat proteins: Functional fibers and films. Front Chem 7: 69. doi: 10.3389/fchem.2019.00069
|
Figures(1)

Judith S. Weis. Improving microplastic research[J]. AIMS Environmental Science, 2019, 6(5): 326-340. doi: 10.3934/environsci.2019.5.326







 DownLoad:
DownLoad: