Missing values in the k-NN algorithm are a significant research concern, especially in low-grade tumours and CSF fluid, which are commonly identified in MRI scans. Missing values are usually ignored, but when data is mined, they can lead to bias and errors. In addition, the data is not missing at random. This study improves image accuracy, boosts the efficiency of missing k-NN hybrid values, and develops a research technique for detecting CSF fluid deposits in brain areas separated from non-tumor areas. We also offer a new method for detecting low-grade tumours or cerebrospinal fluid (CSF) formation in its early stages. In this study, we combine the hybrid K-Nearest Neighbor algorithm with the Discrete Fourier transform (DFT), as well as Time-Lagged analysis of four-dimensional (4D) MRI images. These dependencies exist in both space and time, but present techniques do not account for both sequential linkages and numerous types of missingness. To address this, we propose the DFLk-NN imputation method, which combines two imputation approaches based on a hybrid k-NN extension and the DFT to capture time-lag correlations both within and across variables. There are several types of missingness are enables the imputation of missing values across the variable even when all the data for a given time point is missing. The proposed method gives high accuracies of MRI datasets and retrieves the missing data in the images.
Citation: Soobia Saeed, Habibollah Haron, NZ Jhanjhi, Mehmood Naqvi, Hesham A. Alhumyani, Mehedi Masud. Improve correlation matrix of Discrete Fourier Transformation technique for finding the missing values of MRI images[J]. Mathematical Biosciences and Engineering, 2022, 19(9): 9039-9059. doi: 10.3934/mbe.2022420
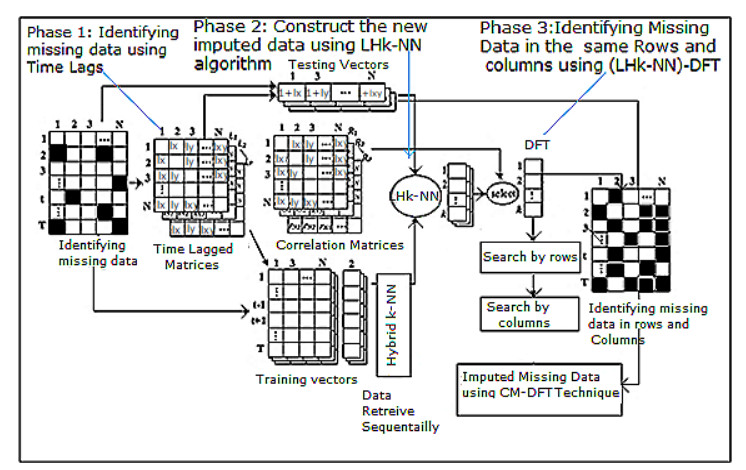
Missing values in the k-NN algorithm are a significant research concern, especially in low-grade tumours and CSF fluid, which are commonly identified in MRI scans. Missing values are usually ignored, but when data is mined, they can lead to bias and errors. In addition, the data is not missing at random. This study improves image accuracy, boosts the efficiency of missing k-NN hybrid values, and develops a research technique for detecting CSF fluid deposits in brain areas separated from non-tumor areas. We also offer a new method for detecting low-grade tumours or cerebrospinal fluid (CSF) formation in its early stages. In this study, we combine the hybrid K-Nearest Neighbor algorithm with the Discrete Fourier transform (DFT), as well as Time-Lagged analysis of four-dimensional (4D) MRI images. These dependencies exist in both space and time, but present techniques do not account for both sequential linkages and numerous types of missingness. To address this, we propose the DFLk-NN imputation method, which combines two imputation approaches based on a hybrid k-NN extension and the DFT to capture time-lag correlations both within and across variables. There are several types of missingness are enables the imputation of missing values across the variable even when all the data for a given time point is missing. The proposed method gives high accuracies of MRI datasets and retrieves the missing data in the images.

| [1] | B. Suthar, H. Patel, A. Goswami, A survey: classification of imputation methods in data mining, Int. J. Emerging Technol. Adv. Eng. , 2 (2012), 309–312. |
| [2] | R. Houari, A. Bounceur, A. K. Tari, M. T. Kecha, Handling missing data problems with sampling methods, in 2014 International Conference on Advanced Networking Distributed Systems and Applications, (2014), 99–104. http://doi.org/10.1109/INDS.2014.25 |
| [3] | P. E. McKnight, K. M. McKnight, S. Sidani, A. J. Figueredo, Missing Data: A Gentle Introduction, Guilford Press, 2007. |
| [4] |
O. F. Ayilara, L. Zhang, T. T. Sajobi, R. Sawatzky, E. Bohm, L. M. Lix, Impact of missing data on bias and precision when estimating the change in patient-reported outcomes from a clinical registry, Health Qual. Life Outcomes, 17 (2019), 106. http://doi.org/10.1186/s12955-019-1181-2 doi: 10.1186/s12955-019-1181-2

|
| [5] |
H. Kang, The prevention and handling of the missing data, Korean J. Anesthesiol. , 64 (2013), 402–409. http://doi.org/10.4097/kjae.2013.64.5.402 doi: 10.4097/kjae.2013.64.5.402
|
| [6] |
T. Donders, G. Van Der Heijden, T. Stijnen, K. Moons, A gentle introduction to imputation of missing values, J. Clin. Epidemiol. , 59 (2006), 1087–1091. http://doi.org/10.1016/j.jclinepi.2006.01.014 doi: 10.1016/j.jclinepi.2006.01.014
|
| [7] |
J. Ludbrook, Outlying observations and missing values: how should they be handled?, Clin. Exp. Pharmacol. Physiol. , 35 (2008), 670–678. http://doi.org/10.1111/j.1440-1681.2007.04860.x. doi: 10.1111/j.1440-1681.2007.04860.x
|
| [8] |
Z. Zhang, Missing values in big data research: some basic skills, Ann. Trans. Med. , 3 (2015), 75–84. https://doi.org/10.3978/j.issn.2305-5839.2015.12.11 doi: 10.3978/j.issn.2305-5839.2015.12.11
|
| [9] |
D. Langkamp, A. Lehman, S. Lemeshow, Techniques for handling missing data in secondary analyses of large surveys, Acad. Pediatr. , 10 (2010), 205–210. https://doi.org/doi:10.1016/j.acap.2010.01.005 doi: 10.1016/j.acap.2010.01.005
|
| [10] | J. T. Shawe, N. Cristianini, Kernel Methods for Pattern Analysis, Cambridge University Press, United Kingdom, 2004. |
| [11] |
J. W. Graham, Missing data analysis: Making it work in the real world, Ann. Rev. Psychol. , 60 (2009), 549–576. http://doi.org/10.1146/annurev.psych.58.110405.085530 doi: 10.1146/annurev.psych.58.110405.085530
|
| [12] |
A. N. Baraldi, C. K. Enders, An introduction to modern missing data analyses, J. Sch. Psychol. , 48 (2010), 5–37. https://doi.org/10.1016/j.jsp.2009.10.001 doi: 10.1016/j.jsp.2009.10.001
|
| [13] |
I. Muhammad, Z. Yan, Supervised machine learning approaches: A survey, ICTACT J. Soft Comput. , 5 (2015), 115–119. http://doi.org/10.21917/ijsc.2015.0133 doi: 10.21917/ijsc.2015.0133
|
| [14] | C. Nithya, V. Saravanan, A study of machine learning techniques in data mining, Int. Sci. Refereed Res. J. , 1 (2018), 31–38. |
| [15] |
I. B. Aydilek, A. Arslan, A hybrid method for imputation of missing values using optimized fuzzy c-means with support vector regression and a genetic algorithm, Inf. Sci., 233 (2013), 25–35. https://doi.org/10.1016/j.ins.2013.01.021 doi: 10.1016/j.ins.2013.01.021
|
| [16] |
J. Lin, N. Li, M. A. Alam, Y. Ma, Data-driven missing data imputation in cluster monitoring system based on deep neural network, Appl. Intell., 50 (2020), 860–877. http://doi.org/10.1007/s10489-019-01560-y doi: 10.1007/s10489-019-01560-y
|
| [17] | A. Choudhury, M. Kosorok, Missing data imputation for classification problems, preprint, arxiv: 2002.10709. |
| [18] |
B. Al-Helali, Q. Chen, B. Xue, M. Zhang, A new imputation method based on genetic programming and weighted K-NN for symbolic regression with incomplete data, Soft Comput., 25 (2021), 5993–6012. http://doi.org/10.1007/s00500-021-05590-y doi: 10.1007/s00500-021-05590-y
|
| [19] |
D. Peng, M. Zou, C. Liu, J. Lu, RESI: A region-splitting imputation method for different types of missing data, Exp. Syst. Appl., 168 (2021), 114425. https://doi.org/10.1016/j.eswa.2020.114425 doi: 10.1016/j.eswa.2020.114425
|
| [20] |
J. Fan, F. Han, H. Liu, Challenges of big data analysis, Nat. Sci. Rev., 1 (2014), 293–314. https://doi.org/10.1093/nsr/nwt032 doi: 10.1093/nsr/nwt032
|
| [21] |
J. Qiu, Q. Wu, G. Ding, Y. Xu, S. Feng, A survey of machine learning for big data processing, EURASIP J. Adv. Signal Proc., 2016 (2016), 67. https://doi.org/10.1186/s13634-016-0355-x doi: 10.1186/s13634-016-0355-x
|
| [22] |
T. Hao, Z. Huang, L. Liang, B. Tang, Biomedical and health information processing and analysis, Math. Biosci. Eng., 17 (2020), 5147–5149. http://doi.org/10.3934/mbe.2020278 doi: 10.3934/mbe.2020278
|
| [23] | K. Machhale, H. B. Nandpuru, V. Kapur, L. Kosta, MRI brain cancer classification using hybrid classifier (SVM-KNN), in 2015 International Conference on Industrial Instrumentation and Control (ICIC), (2015). https://doi.org/10.1109/SCEECS.2014.6804439 |
| [24] |
E. Dritsas, M. Trigka, P. Gerolymatos, S. Sioutas, Trajectory clustering and k-NN for robust privacy preserving spatiotemporal databases, Algorithms, 11 (2020), 207–210. https://doi.org/10.3390/a11120207 doi: 10.3390/a11120207
|
| [25] | L. Beretta, A. Santaniello, Nearest neighbour imputation algorithms: a critical evaluation, in The 5th Translational Bioinformatics Conference (TBC 2015), (2015), 1–7. http://doi.org/10.1186/s12911-016-0318-z |
| [26] | J. Derrac, F. Chiclana, S. Garcia, F. Herrera, An interval-valued k-nearest neighbor's classifier, in 16th World Congress of the International Fuzzy Systems Association (IFSA), (2015), 378–384. https://doi.org/10.2991/ifsa-eusflat-15.2015.55 |
| [27] | R. Armina, A. Zain, N. Ali, R. Sallehuddin, A review on missing value estimation using imputation algorithm, in International Conference on Materials Physics and Mechanics, (2017), 892–895. http://doi.org/10.1088/1742-6596/892/1/012004 |
| [28] |
H. Nezamabadi-pour, E. Kabir, Concept learning by fuzzy k-NN classification and relevance feedback for efficient image retrieval, Exp. Syst. Appl., 36 (2009), 5948–5954. https://doi.org/10.1016/j.eswa.2008.07.008 doi: 10.1016/j.eswa.2008.07.008
|
| [29] |
A. L. Green, A. Arnaud, J. Batiller, S. Eljamel, J. Gauld, P. Jones, et al., A multi-centre, prospective, randomized controlled study to evaluate the use of a fibrin sealant as an adjunct to sutured dural repair, Br. J. Neurosurg., 29 (2015), 11–17. http://doi.org/10.3109/02688697.2014.948808 doi: 10.3109/02688697.2014.948808
|
| [30] |
W. I. Schievink, M. M. Maya, S. Jean-Pierre, M. Nuño, R.S. Prasad, F. G. Moser, A classification system of spontaneous spinal CSF leaks, Neurology, 87 (2016), 673–679. https://doi.org/10.1212/WNL.0000000000002986 doi: 10.1212/WNL.0000000000002986
|
| [31] |
S. Chowdhary, S. Damlo, M. C. Chamberlain, Cerebrospinal fluid dissemination and neoplastic meningitis in primary brain tumors, J. Moffitt Cancer Center, 24 (2017), 1–16. https://doi.org/10.1177/107327481702400118 doi: 10.1177/107327481702400118
|
| [32] |
B. Srinivas, R. G. Sasibhushana, A hybrid CNN-KNN model for MRI brain tumor classification, Int. J. Recent Technol. Eng., 8 (2019), 5230–5235. https://doi.org/10.35940/ijrte.B1051.078219 doi: 10.35940/ijrte.B1051.078219
|
| [33] |
L. Po, N. Bikakis, F. Desimoni, G. Papastefanatos, Linked data visualization: Techniques, tools, and big data, Synth. Lect. Semantic Web Theory Technol., 10 (2020), 1–157. https://doi.org/10.2200/S00967ED1V01Y201911WBE019 doi: 10.2200/S00967ED1V01Y201911WBE019
|
| [34] | E. Chu, Discrete and continuous Fourier transforms: analysis, applications and fast algorithms, in Chapman and Hall/CRC, (2008), 424–458. |
| [35] | G. Niranjana, D. Chatterjee, Security and privacy issues in biomedical AI systems and potential solutions, in Handbook of Artificial Intelligence in Biomedical Engineering, Apple Academic Press, 2021. |
| [36] |
Y. Zhang, S. Wang, J. Yang, Z. Zhang, P. Phillips, P. Sun, et al., A comprehensive survey on fractional Fourier transform, Fundam. Inf., 151 (2017), 1–48. https://doi.org/10.3233/FI-2017-1477 doi: 10.3233/FI-2017-1477
|
| [37] |
S. Saeed, A. Abdullah, N. Z. Jhanjhi, Implementation of Fourier transformation with brain cancer and CSF images, Indian J. Sci. Technol., 12 (2019), 1–9. https://doi.org/10.17485/ijst/2019/v12i37/146151. doi: 10.17485/ijst/2019/v12i37/146151
|
| [38] |
A. Q. Khan, I. Ahmad, H. S. Alayachi, M. S. Noorani, A. Khaliq, Discrete-time predator-prey model with flip bifurcation and chaos control, Math. Biosci. Eng., 17 (2020), 5944–5960. http://doi.org/10.3934/mbe.2020317 doi: 10.3934/mbe.2020317
|
| [39] | Alsisi A, Eftimie R, Trucu D. Nonlocal multiscale modelling of tumour-oncolytic viruses interactions within a heterogeneous fibrous/non-fibrous extracellular matrix, preprint, arXiv: 2112.09732. |
| [40] |
S. Wang, M. Celebi, Y. Zhang, X. Yu, S. Lu, X. Yao, et al., Advances in data preprocessing for biomedical data fusion: an overview of the methods, challenges, and prospects, Inf. Fusion, 76 (2021), 376–421. https://doi.org/10.1016/j.inffus.2021.07.001 doi: 10.1016/j.inffus.2021.07.001
|
| [41] |
Y. Zhang, Z. Dong, S. Wang, X. Yu, X. Yao, Q. Zhou, et al., Advances in multimodal data fusion in neuroimaging: overview, challenges, and novel orientation, Inf. Fusion, 64 (2020), 149–187. https://doi.org/10.1016/j.inffus.2020.07.006 doi: 10.1016/j.inffus.2020.07.006
|
| [42] | D. G. Dansereau, B. Girod, G. Wetzstein, Supplementary material LiFF: Light field features in scale and depth, in Proceeding: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), (2019). https://doi.org/10.1109/CVPR.2019.00823 |
| [43] | A. Silva, Light field processor: a lytro illum imaging application, Ph. D thesis, University Institute of Lisbon, 2016. |







Figures(8) / Tables(6)

Soobia Saeed, Habibollah Haron, NZ Jhanjhi, Mehmood Naqvi, Hesham A. Alhumyani, Mehedi Masud. Improve correlation matrix of Discrete Fourier Transformation technique for finding the missing values of MRI images[J]. Mathematical Biosciences and Engineering, 2022, 19(9): 9039-9059. doi: 10.3934/mbe.2022420







 DownLoad:
DownLoad: