To improve the performance of genetic algorithms (GAs) in complex optimization settings, this work offered two novel real-coded crossover operators: one based on the Gumbel distribution (GX) and the other on the Rayleigh distribution (RX). These innovative operators, when combined with three different mutation techniques, created a significant improvement in GA methodology. Our meticulous simulations showed that the GX operator significantly outperformed RX and other traditional operators, demonstrating its superior capacity to address complex optimization problems. The GX operator's unusual robustness was further validated through detailed performance analysis utilizing the VlseKriterijuska Optimizacija I Komoromisno Resenje (VIKOR) multi-criteria decision-making technique, setting a new standard in crossover operator design and significantly improving the state of the art in GAs.
Citation: Jalal-ud-Din, Ehtasham-ul-Haq, Ibrahim M. Almanjahie, Ishfaq Ahmad. Enhancing probabilistic based real-coded crossover genetic algorithms with authentication of VIKOR multi-criteria optimization method[J]. AIMS Mathematics, 2024, 9(10): 29250-29268. doi: 10.3934/math.20241418
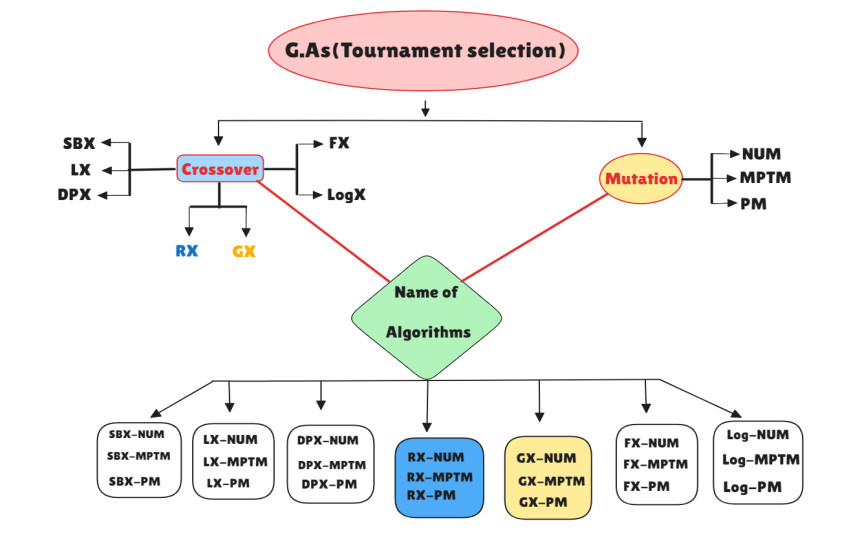
To improve the performance of genetic algorithms (GAs) in complex optimization settings, this work offered two novel real-coded crossover operators: one based on the Gumbel distribution (GX) and the other on the Rayleigh distribution (RX). These innovative operators, when combined with three different mutation techniques, created a significant improvement in GA methodology. Our meticulous simulations showed that the GX operator significantly outperformed RX and other traditional operators, demonstrating its superior capacity to address complex optimization problems. The GX operator's unusual robustness was further validated through detailed performance analysis utilizing the VlseKriterijuska Optimizacija I Komoromisno Resenje (VIKOR) multi-criteria decision-making technique, setting a new standard in crossover operator design and significantly improving the state of the art in GAs.

| [1] | K. Deb, Multi-objective optimization using evolutionary algorithms: An introduction, In: Multi-objective evolutionary optimisation for product design and manufacturing, London: Springer, 2011, 3–34. https://doi.org/10.1007/978-0-85729-652-8_1 |
| [2] | D. E. Goldberg, Genetic algorithms in search, optimization, machine learning, Boston: Addison-Wesley, 1989. |
| [3] | Z. Michalewicz, J. Arabas, Genetic algorithms for the 0/1 knapsack problem, In: Methodologies for intelligent systems, Berlin: Springer, 869 (1994), 134–143. https://doi.org/10.1007/3-540-58495-1_14 |
| [4] |
F. Lu, T. Yan, H. Bi, M. Feng, S. Wang, M. Huang, A bilevel whale optimization algorithm for risk management scheduling of information technology projects considering outsourcing, Knowl. Based Syst., 235 (2022), 107600. https://doi.org/10.1016/j.knosys.2021.107600 doi: 10.1016/j.knosys.2021.107600

|
| [5] |
A. Nahangi, M. Awwad, A tabu search heuristic for the outsourcing risk management problem in multi-echelon supply chains, Int. J. Oper. Res., 50 (2024), 490–520. https://doi.org/10.1504/IJOR.2024.140483 doi: 10.1504/IJOR.2024.140483
|
| [6] | P. C. Chu, J. E. Beasley, A genetic algorithm for the set partitioning problem, London: Imperial College, 1995. |
| [7] | S. Wasserkrug, O. Davidovich, E. Shindin, D. Subramanian, P. Ram, P. Mural, et al., Ensuring the quality of optimization solutions in data generated optimization models, In: IJCAI Decision science for optimization workshop, 2021. |
| [8] |
I. Ahmadianfar, O. Bozorg-Haddad, X. Chu, Gradient-based optimizer: A new metaheuristic optimization algorithm, Inform. Sci., 540 (2020), 131–159. https://doi.org/10.1016/j.ins.2020.06.037 doi: 10.1016/j.ins.2020.06.037
|
| [9] | R. C. Eberhart, Y. Shi, J. Kennedy, Swarm intelligence (Morgan Kaufmann series in evolutionary computation), Morgan Kaufmann Publishers, 2001, |
| [10] |
S. Kirkpatrick, C. D. Gelatt Jr, M. P. Vecchi, Optimization by simulated annealing, Science, 220 (1983), 671–680. https://doi.org/10.1126/science.220.4598.671 doi: 10.1126/science.220.4598.671
|
| [11] |
D. E. Goldberg, K. Deb, A comparative analysis of selection schemes used in genetic algorithms, Found. Genet. Algorithms, 1 (1991), 69–93. https://doi.org/10.1016/B978-0-08-050684-5.50008-2 doi: 10.1016/B978-0-08-050684-5.50008-2
|
| [12] | J. H. Holland, Adaptation in natural and artificial systems, The MIT Press, 1992. https://doi.org/10.7551/mitpress/1090.001.0001 |
| [13] | K. A. De Jong, An analysis of the behavior of a class of genetic adaptive systems, University of Michigan, 1975. |
| [14] |
E. U. Haq, A. Hussain, I. Ahmad, Performance evaluation of novel selection processes through hybridization of k-means clustering and genetic algorithm, Appl. Ecology Environ. Res., 17 (2019), 14159–14177. http://dx.doi.org/10.15666/aeer/1706_1415914177 doi: 10.15666/aeer/1706_1415914177
|
| [15] |
E. U. Haq, I. Ahmad, A. Hussain, I. M. Almanjahie, A novel selection approach for genetic algorithms for global optimization of multimodal continuous functions, Comput. Intell. Neurosci., 2019. https://doi.org/10.1155/2019/8640218 doi: 10.1155/2019/8640218
|
| [16] |
S. Katoch, S. S. Chauhan, V. Kumar, A review on genetic algorithm: Past, present, and future, Multimed Tools Appl., 80 (2021), 8091–8126. https://doi.org/10.1007/s11042-020-10139-6 doi: 10.1007/s11042-020-10139-6
|
| [17] |
A. H. Wright, Genetic algorithms for real parameter optimization, Founda. Genet. Algorithms, 1 (1991), 205–218. https://doi.org/10.1016/B978-0-08-050684-5.50016-1 doi: 10.1016/B978-0-08-050684-5.50016-1
|
| [18] |
K. Deep, M. Thakur, A new crossover operator for real coded genetic algorithms, Appl. Math. Comput., 188 (2007), 895–911. https://doi.org/10.1016/j.amc.2006.10.047 doi: 10.1016/j.amc.2006.10.047
|
| [19] | K. Deb, R. B. Agrawal, Simulated binary crossover for continuous search space, Complex Syst., 9 (1995), 115–148. |
| [20] |
F. B. Naqvi, M. Y. Shad, S. Khan, A new logistic distribution based crossover operator for real-coded genetic algorithm, J. Stat. Comput. Simul., 91 (2021), 817–835. https://doi.org/10.1080/00949655.2020.1832093 doi: 10.1080/00949655.2020.1832093
|
| [21] |
M. Thakur, S. S. Meghwani, H. Jalota, A modified real coded genetic algorithm for constrained optimization, Appl. Math. Comput., 235 (2014), 292–317. https://doi.org/10.1016/j.amc.2014.02.093 doi: 10.1016/j.amc.2014.02.093
|
| [22] |
E. ul Haq, I. Ahmad, I. M. Almanjahie, A novel parent centric crossover with the log-logistic probabilistic approach using multimodal test problems for real-coded genetic algorithms, Math. Probl. Eng., 2020 (2020), 2874528. https://doi.org/10.1155/2020/2874528 doi: 10.1155/2020/2874528
|
| [23] | E. J. Gumbel, Statistics of extremes, Columbia university press, 1958. https://doi.org/10.7312/gumb92958 |
| [24] | A. R. Kamel, A. A. Alqarni, M. A. Ahmed, On the performance robustness of artificial neural network approaches and Gumbel extreme value distribution for prediction of wind speed, Int. J. Sci. Res. Math. Statist. Sci., 9 (2022), 5–22. |
| [25] | G. Grimmett, D. Stirzaker, Probability and random processes, Oxford university press, 2020. |
| [26] |
S. Mahajan, L. Abualigah, A. K. Pandit, Hybrid arithmetic optimization algorithm with hunger games search for global optimization, Multimed. Tools Appl., 81 (2022), 28755–28778. https://doi.org/10.1007/s11042-022-12922-z doi: 10.1007/s11042-022-12922-z
|
| [27] |
A. Mardani, E. K. Zavadskas, K. Govindan, A. A. Senin, A. Jusoh, VIKOR technique: A systematic review of the state-of-the-art literature on methodologies and applications, Sustainability, 8 (2016), 37. https://doi.org/10.3390/su8010037 doi: 10.3390/su8010037
|
| [28] |
G. Zheng, X. Wang, The comprehensive evaluation of renewable energy system schemes in tourist resorts based on VIKOR method, Energy, 193 (2020), 116676. https://doi.org/10.1016/j.energy.2019.116676 doi: 10.1016/j.energy.2019.116676
|
| [29] | M. Zeleny, Multiple criteria decision making, 1982. |




Figures(5) / Tables(10)

Jalal-ud-Din, Ehtasham-ul-Haq, Ibrahim M. Almanjahie, Ishfaq Ahmad. Enhancing probabilistic based real-coded crossover genetic algorithms with authentication of VIKOR multi-criteria optimization method[J]. AIMS Mathematics, 2024, 9(10): 29250-29268. doi: 10.3934/math.20241418







 DownLoad:
DownLoad: