Across many real-world problems, crossover tendencies are seen. Piecewise differential operators are constructed by using different kernels that exhibit behaviors arising in several real-world problems; thus, crossover behaviors could be well modeled using these differential and integral operators. Power-law processes, fading memory processes and processes that mimic the generalized Mittag-Leffler function are a few examples. However, the use of piecewise differential and integral operators cannot be applied to all processes involving crossovers. For instance, a considerable alteration eventually manifests when groundwater over-abstraction causes it to flow from confined to unconfined aquifers. The idea of piecewise differential equations, which can be thought of as an extension of piecewise functions to the framework of differential equations, is introduced in this work. While we concentrate on ordinary differential equations, it is important to note that partial differential equations can also be constructed with the same technique. For both integer and non-integer instances, piecewise differential equations have been introduced. We have explained the usage of the Laplace transform for the linear case and demonstrated how a new class of Bode diagrams could be produced. We have provided some examples of numerical solutions as well as conditions for the existence and uniqueness of their solutions. We discussed a few scenarios in which we used chaos and non-linear ordinary differential equations to produce novel varieties of chaos. We believe that this idea could lead to some significant conclusions in the future.
Citation: Abdon Atangana, Seda İğret Araz. Piecewise differential equations: theory, methods and applications[J]. AIMS Mathematics, 2023, 8(7): 15352-15382. doi: 10.3934/math.2023785
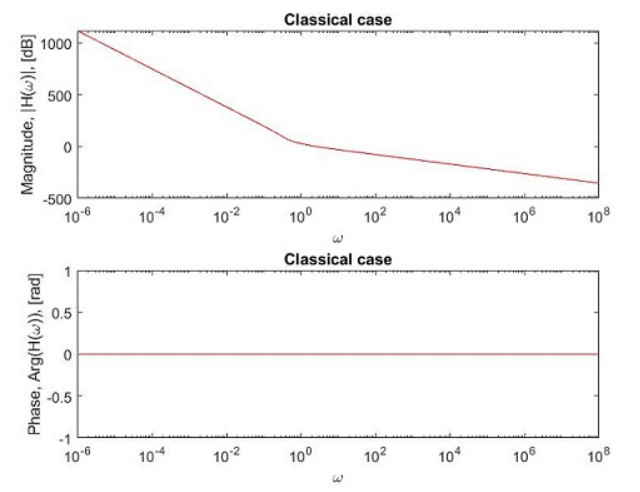
Across many real-world problems, crossover tendencies are seen. Piecewise differential operators are constructed by using different kernels that exhibit behaviors arising in several real-world problems; thus, crossover behaviors could be well modeled using these differential and integral operators. Power-law processes, fading memory processes and processes that mimic the generalized Mittag-Leffler function are a few examples. However, the use of piecewise differential and integral operators cannot be applied to all processes involving crossovers. For instance, a considerable alteration eventually manifests when groundwater over-abstraction causes it to flow from confined to unconfined aquifers. The idea of piecewise differential equations, which can be thought of as an extension of piecewise functions to the framework of differential equations, is introduced in this work. While we concentrate on ordinary differential equations, it is important to note that partial differential equations can also be constructed with the same technique. For both integer and non-integer instances, piecewise differential equations have been introduced. We have explained the usage of the Laplace transform for the linear case and demonstrated how a new class of Bode diagrams could be produced. We have provided some examples of numerical solutions as well as conditions for the existence and uniqueness of their solutions. We discussed a few scenarios in which we used chaos and non-linear ordinary differential equations to produce novel varieties of chaos. We believe that this idea could lead to some significant conclusions in the future.

| [1] |
A. Atangana, S. İğret Araz, New concept in calculus: piecewise differential and integral operators, Chaos Soliton. Fract., 145 (2021), 110638. https://doi.org/10.1016/j.chaos.2020.110638 doi: 10.1016/j.chaos.2020.110638

|
| [2] |
M. Caputo, Linear model of dissipation whose Q is almost frequency independent-II, Geophys. J. Int., 13 (1967), 529–539. https://doi.org/10.1111/j.1365-246X.1967.tb02303.x doi: 10.1111/j.1365-246X.1967.tb02303.x
|
| [3] |
A. Atangana, D. Baleanu, New fractional derivatives with non-local and non-singular kernel: theory and application to heat transfer model, Therm. Sci., 20 (2016), 763–769. https://doi.org/10.2298/TSCI160111018A doi: 10.2298/TSCI160111018A
|
| [4] | M. Caputo, M. Fabrizio, A new definition of fractional derivative without singular kernel, Prog. Fract. Differ. Appl., 1 (2015), 73–85. |
| [5] | A. Atangana, S. İğret Araz, New numerical scheme with Newton polynomial: theory, methods and applications, Academic Press, 2021. https://doi.org/10.1016/B978-0-12-775850-3.50017-0 |
| [6] | A. Atangana, S. İğret Araz, A modified parametrized method for ordinary differential equations with nonlocal operators, HAL Science Ouverte, 1 (2022), hal-03840759. |
| [7] |
M. Toufik, A. Atangana, New numerical approximation of fractional derivative with non-local and non-singular kernel: application to chaotic models, Eur. Phys. J. Plus, 137 (2022), 191. https://doi.org/10.1140/epjp/s13360-022-02380-9 doi: 10.1140/epjp/s13360-022-02380-9
|
| [8] |
I. A. Arık, S. İğret Araz, Crossover behaviors via piecewise concept: a model of tumor growth and its response to radiotherapy, Results Phys., 41 (2022), 105894. https://doi.org/10.1016/j.rinp.2022.105894 doi: 10.1016/j.rinp.2022.105894
|
| [9] |
H. Hellal, H. Elabsy, H. Elkaranshawy, Mathematical model for combined radiotherapy and chemotherapy that fits with experimental data, J. Phys. Conf. Ser., 2287 (2022), 012013. https://doi.org/10.1088/1742-6596/2287/1/012013 doi: 10.1088/1742-6596/2287/1/012013
|
| [10] |
Z. Z. Qiu, Y. Y. Sun, X. He, J. Wei, R. Zhou, J. Bai, et al., Application of genetic algorithm combined with improved SEIR model in predicting the epidemic trend of COVID-19, Sci. Rep., 12 (2022), 8910. https://doi.org/10.1038/s41598-022-12958-z doi: 10.1038/s41598-022-12958-z
|
| [11] | S. Bouali, A 3D strange attractor with a distinctive silhouette. The butterfly effect revisited, 24th ABCM International Congress of Mechanical Engineering, 2013. |
| [12] |
A. Arneodo, P. H. Coullet, E. A. Spiegel, The dynamics of triple convection, Geophysical Astrophysical Fluid Dynamics, 31 (1985), 1–48. https://doi.org/10.1080/03091928508219264 doi: 10.1080/03091928508219264
|
| [13] |
P. Muthukumar, P. Balasubramaniam, K. Ratnavelu, Synchronization and an application of a novel fractional order King-Cobra chaotic system, Chaos, 24 (2014), 033105. https://doi.org/10.1063/1.4886355 doi: 10.1063/1.4886355
|
| [14] |
Z. H. Wang, Y. X. Sun, B. J. van Wyk, G. Y. Qi, M. A. van Wyk, A 3-D four-wing attractor and its analysis, Braz. J. Phys., 39 (2009), 547–553. https://doi.org/10.1590/S0103-97332009000500007 doi: 10.1590/S0103-97332009000500007
|
| [15] |
H. K. Chen, C. I. Lee, Anti-control of chaos in rigid body motion, Chaos Soliton. Fract., 21 (2004), 957–965. https://doi.org/10.1016/J.CHAOS.2003.12.034 doi: 10.1016/J.CHAOS.2003.12.034
|
| [16] |
R. Thomas, Deterministic chaos seen in terms of feedback circuits: analysis, synthesis, "labyrinth chaos", Int. J. Bifurcat. Chaos, 9 (1999), 1889–1905. https://doi.org/10.1142/S0218127499001383 doi: 10.1142/S0218127499001383
|
| [17] |
D. Q. Li, A three-scroll chaotic attractor, Phys. Lett. A, 372 (2008), 387–393. https://doi.org/10.1016/j.physleta.2007.07.045 doi: 10.1016/j.physleta.2007.07.045
|
| [18] |
M. Alqhtani, K. M. Owolabi, K. M. Saad, E. Pindza, Spatiotemporal chaos in spatially extended fractional dynamical systems, Commun. Nonlinear Sci., 119 (2023), 107118. https://doi.org/10.1016/j.cnsns.2023.107118 doi: 10.1016/j.cnsns.2023.107118
|
| [19] |
K. M. Owolabi, K. C. Patidar, A. Shikongo, A fitted operator method for a system of delay model of tumor cells dynamics within their micro-environment, Appl. Math. Inform. Sci., 16 (2022), 367–388. https://doi.org/10.18576/amis/160225 doi: 10.18576/amis/160225
|












Figures(13)

Abdon Atangana, Seda İğret Araz. Piecewise differential equations: theory, methods and applications[J]. AIMS Mathematics, 2023, 8(7): 15352-15382. doi: 10.3934/math.2023785







 DownLoad:
DownLoad: