Citation: Joje Mar P. Sanchez, Marchee T. Picardal, Marnan T. Libres, Hedeliza A. Pineda, Ma. Lourdes B. Paloma, Judelynn M. Librinca, Reginald Raymund A. Caturza, Sherry P. Ramayla, Ruby L. Armada, Jay P. Picardal. Characterization of a river at risk: the case of Sapangdaku River in Toledo City, Cebu, Philippines[J]. AIMS Environmental Science, 2020, 7(6): 559-574. doi: 10.3934/environsci.2020035

| [1] | Gorme JB, Maniquiz MC, Song P, et al. (2010) The water quality of the Pasig River in the City of Manila, Philippines: Current status, management and future recovery. Environ Eng Res 15: 173–179. |
| [2] | Catchilar GC (2008) Fundamentals of Environmental Science. Mandaluyong City: National Book Store. |
| [3] | Mora C, Tittensor DP, Adl S, et al. (2011) How many species are there on Earth and in the ocean? PLoS Biol 9: e1001127. |
| [4] | Shiklomanov L (1993) World freshwater resources. Water in crisis: A guide to the fresh water resources. New York: Oxford University Press, 13–24. |
| [5] | Gleick PH (1996) Water resources. Encyclopedia of climate and weather. New York: Oxford University Press, 2: 817–823. |
| [6] | Lansing JS, Lansing P, Erazo J (1998) The value of a river. J Pol Ecol 5: 1–22. |
| [7] | Jordaan JM (2009) The uses of river water and impacts. Fresh Surface Water 3: 1–10. |
| [8] | Environmental Management Bureau (2014) National water quality report 2006–2013. Quezon City: Department of Environment and Natural Resources-EMB. |
| [9] | World Bank (2003) Philippines – environment monitor 2003. Available from: http://documents1.worldbank.org/curated/en/144581468776089600/pdf/282970PH0Environment0monitor.pdf |
| [10] | Dyer SD, Peng C, McAvoy DC, et al. (2003) The influence of untreated wastewater to aquatic communities in the Balatuin River, the Philippines. Chemosphere 52: 43–53. |
| [11] | Environmental Management Bureau (2016) Annual Report for CY 2016. Quezon City: Department of Environment and Natural Resources-EMB. |
| [12] | Picardal JP, Bendoy A, Calumba JR, et al. (2012) Impacts of waste disposal practices and water utilization of riverside dwellers on physico-chemical and microbiological properties of Butuanon River, Central Visayas, Philippines. CNU J High Educ Sp.: 78–100. |
| [13] | Oquiñena-Paler, MKM, Ancog, R (2014) Copper, lead and zinc concentration in water, sediments and catfish (Clarias macrocephalus gunther) from Butuanon River, Metro Cebu, Philippines. IOSR J Environ Sci Toxicol Food Tech 8: 49–56. |
| [14] | Lo JM, Sakamoto H. Heavy metals distribution in the surface sediments from central west coast of Cebu, Philippines. J Sediment Sco Jap 62: 31–41. |
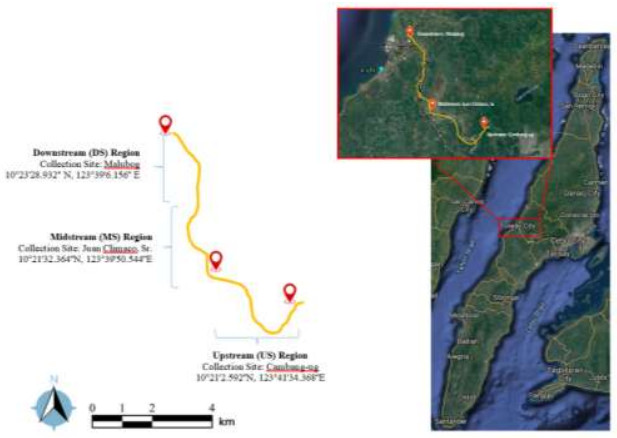
| [15] | Paringit, EC, Otadoy, RS (2017) LiDAR surveys and Flood mapping of Sapangdaku River. Quezon City: University of the Philippines Training Center for Applied Geodesy and Photogrammetry. |
| [16] | American Public Health Association, American Water Works Association, & Water Environment Association (2005) Standard methods for the examination of water and wastewater (21st Edition). Washington, DC: APHA-AWWA-WEF. |
| [17] | Environmental Protection Agency (2012) 5.1 Stream flow. Available from: https://archive.epa.gov/water/archive/web/html/vms51.html |
| [18] | Environmental Protection Agency (2012) 5.9 Conductivity. Available from: https://archive.epa.gov/water/archive/web/html/vms59.html |
| [19] | Minnesota Pollution Control Agency (2008) Turbidity: description, impact on water quality, sources, measures- A general overview. Available from: https://www.pca.state.mn.us/sites/default/files/wq-iw3-21.pdf |
| [20] | National Institute of Water and Atmospheric Research (2016) Streamflow. Available from: https://niwa.co.nz/ |
| [21] | Ling TY, Soo CL, Liew JJ, et al. (2017) Application of multivariate statistical analysis in evaluation of surface river water quality of a tropical river. J Chem 2017. |
| [22] | Byrne P, Wood PJ, Reid I (2012) The impairment of river systems by metal mine contamination: A review including remediation options. Crit Rev Environ Sci Technol 42: 2017–2077. |
| [23] | Haddaway NR, Cooke SJ, Lesser P, et al. (2019) Evidence of the impacts of metal mining and the effectiveness of mining mitigation measures on social–ecological systems in Arctic and boreal regions: a systematic map protocol. Environ Evid 8. |
| [24] | Atlas Mining (2013) Safeguarding the natural balance of the environment[Internet] |
| [25] | Maglangit FF, Galapate RP, Bensig, EO (2014) Physicochemical-assessment of the water quality of Buhisan River, Cebu, Philippines. Int J Res Environ Sci Tech 4: 83–87 |
| [26] | Maglangit FF, Galapate RP, Bensig, EO (2014) Physicochemical-assessment of the water quality of Bulacao River, Cebu, Philippines. J Biodiv Environ Sci 5: 518–525. |
| [27] | Kheira R, Boualem R (2015) Impact of quarry sand exploitation on surface water flow quality—case of El Harrach stream channel, Algeria. Desalin Water Treat 57: 21189–21200. |
| [28] | Li H, Shi A, Li M, et al. (2013) Effect of pH, temperature, dissolved oxygen, and flow rate of overlying water on heavy metals release from storm sewer sediments. J Chem Article ID 434012. |
| [29] | Nyanti L, Soo C, Danial-Nakhaie M, et al. (2018) Effects of water temperature and pH on total suspended solids tolerance of Malaysian native and exotic fish species. AACL Bioflux 11: 565–573. |
| [30] | Regional Aquatics Monitoring Program (2018) Water quality indicators: Temperature and dissolved oxygen. Available from: http://www.ramp-alberta.org/river/water+sediment+quality/chemical/temperature+and+dissolved+oxygen.aspx#:~:text=Water%20temperature%20is%20one%20of,decreases%20as%20water%20temperature%20increases. |
| [31] | State Water Resources Control Board (2004) The clean water team guidance compendium for watershed monitoring and assessment. Available from: https://www.waterboards.ca.gov/water_issues/programs/swamp/cwt_guidance.html |
| [32] | Halliday, SJ, Skeffington, RA, Bowes, MJ, et al. (2008) The water quality of the River Enbourne, UK: Observation from high-frequency in a rural, lowland river system. Water 6: 150–180. |
| [33] | Green JA, Pavlish JA, Merritt RG, et al. (2005) Hydraulic impacts of quarries and gravel pits. Legislative Commission on Minnesota Resources. Available from: https://files.dnr.state.mn.us/publications/waters/hdraulic-impacts-of-quarries.pdf |
| [34] | Wood MS (2014) Estimating suspended sediment in rivers using acoustic Doppler meters. US Geological Survey Fact Sheet. US Geological Survey |
| [35] | Simon TP (1999) Assessing the sustainability and biological integrity of water resources using fish communities. New York: CRC Press |
| [36] | Armstrong DS, Parker GW, Richards TA (2004) Evaluation of streamflow requirements for habitat protection by comparison to streamflow characteristics at index streamflow-gaging stations in Southern New England. US Geological Survey |
| [37] | Maine Department of Environmental Protection (2016) Dragonfly & damselfly larvae (Odonata). Available from: https://www.maine.gov/dep/water/monitoring/biomonitoring/sampling/bugs/dragonsanddamsels.html |
| [38] | Mesner N, Geiger J (2005) Dissolved Oxygen. Utah State University Extension. Available from: https://extension.usu.edu/waterquality/files-ou/whats-in-your-water/do/NR_WQ_2005-16dissolvedoxygen.pdf |
| [39] | Vancouver Water Resources Education Center (2020) Water quality: Temperature, pH and dissolved oxygen. Available from: https://www.cityofvancouver.us/sites/default/files/fileattachments/public_works/page/18517/water_quality_tempph_do.pdf |
| [40] | Samudro G, Mangkoedihardjo S (2010) Review on BOD, COD and BOD/COD ratio: A triangle zone for toxic, biodegradable and stable levels. Int J Acad Res 2: 235–239 |
| [41] | Jordão, CP, Pereira, MG, Matos, AT, et al. (2005) Influence of domestic and industrial waste discharges on water quality at Minas Gerais State, Brazil. J Braz Chem Soc 16: 241–250 |
| [42] | Ogunfowokon AO, Okoh EK, Adenuga AA, et al. (2005) An assessment of the impact of point source pollution from a university sewage treatment oxidation pond on a receiving stream- A preliminary study. J App Sci 5: 36–43 |
| [43] | Raisbeck MF, Riker SL, Tate CM, et al. (2008) Water Quality for Wyoming Livestock & Wildlife: A Review of the Literature pertaining to Health Effects of Inorganic Contaminants. University of Wyoming Department of Veterinary Sciences |
| [44] | Rodrigues ACM, Jesus FT, Fernandes MAF, et al. (2013) Mercury toxicity to freshwater organisms: Extrapolation using species sensitivity distribution. Bull Environ Contam Toxicol, 91: 191–196 |
| [45] | Paul S, Mandal A, Bhattacharjee P, et al. (2019) Evaluation of water quality and toxicity after exposure of lead nitrate in fresh water fish, major source of water pollution. Egypt J Aquat Res, 45: 345–351 |
| [46] | Woody CA, O'Neal SL (2012) Effects of copper on fish and aquatic resources. The Nature Conservancy. Available from: https://www.conservationgateway.org/ConservationByGeography/NorthAmerica/UnitedStates/alaska/sw/cpa/Documents/W2013ECopperF062012.pdf |
| [47] | Oram B (2020) Drinking water and other waters bacterial testing and screening. Water Research Center. Available from: https://water-research.net/index.php/water-testing/bacteria-testing/coliform-bacteria |
| [48] | World Health Organization (2003) Guidelines for drinking-water quality. Geneva: WHO |
| [49] | Seo M, Lee H, Kim Y (2019) Relationship between coliform bacteria and water quality factors at Weir Stations in the Nakdong River, South Korea. Water 11: 1171 |
| [50] | Simeonov V, Stratis JA, Samaraetal C (2003) Assessment of the surface water quality in Northern Greece. Water Res 37: 4119–4124 |
| [51] | Bilotta GS, Brazier RE (2008) Understanding the influenceof suspended solids on water quality and aquatic biota. Water Res 42: 2849–2861 |
| [52] | Phung D, Huang C, Rutherford S (2015) Temporal and spatial assessment of river surface water quality using multivariate statistical techniques: A study in Can Tho City, a Mekong Deltaarea, Vietnam. Environ Monito Assess 187: 5. |
Figures(3) / Tables(3)

Joje Mar P. Sanchez, Marchee T. Picardal, Marnan T. Libres, Hedeliza A. Pineda, Ma. Lourdes B. Paloma, Judelynn M. Librinca, Reginald Raymund A. Caturza, Sherry P. Ramayla, Ruby L. Armada, Jay P. Picardal. Characterization of a river at risk: the case of Sapangdaku River in Toledo City, Cebu, Philippines[J]. AIMS Environmental Science, 2020, 7(6): 559-574. doi: 10.3934/environsci.2020035







 DownLoad:
DownLoad: