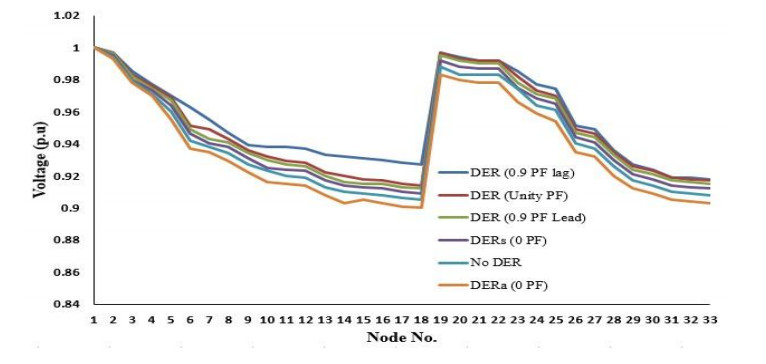
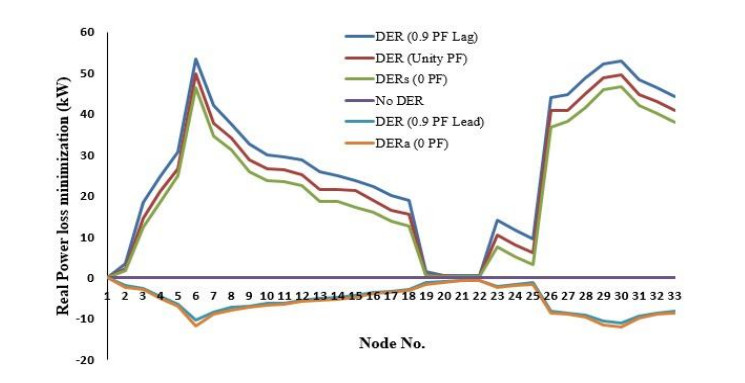
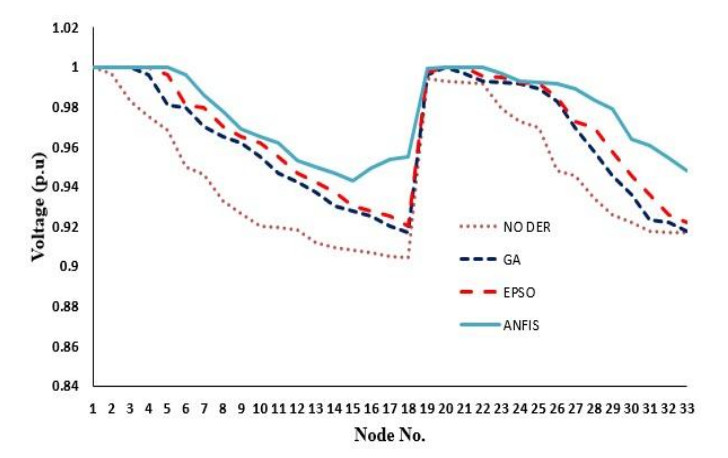
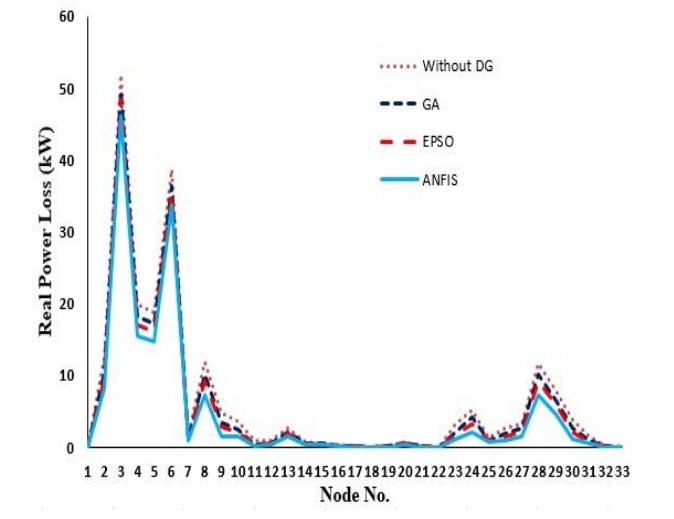
System islanding, relay tripping, and reverse power flow-like issues in the distribution network are all caused by randomly placed distributed energy resources. To minimize such problems, distributed energy resource (DER) optimal placement in the radial distribution network (RDN) is essential to reduce power loss and enhance the voltage profile. When placing DERs, consideration of constraints like size, location, number, type, and power factor (PF) should be considered. For optimal placement, renewable and nonrenewable DERs are considered. The effects of different types and PFs of DER placements have been tested on the IEEE 33 bus RDN to satisfy all limitations. Using various intelligent techniques, distributed energy resource units of optimal type, PF, size, quantity, and position were placed in the IEEE 33 bus RDN. These intelligent strategies for minimizing power loss, enhancing the voltage profile, and increasing the convergence rate are based on an adaptive neuro-fuzzy inference system, a genetic algorithm, and enhanced particle swarm optimization.
Citation: Amandeep Gill, Pushpendra Singh, Jalpa H. Jobanputra, Mohan Lal Kolhe. Placement analysis of combined renewable and conventional distributed energy resources within a radial distribution network[J]. AIMS Energy, 2022, 10(6): 1216-1229. doi: 10.3934/energy.2022057
System islanding, relay tripping, and reverse power flow-like issues in the distribution network are all caused by randomly placed distributed energy resources. To minimize such problems, distributed energy resource (DER) optimal placement in the radial distribution network (RDN) is essential to reduce power loss and enhance the voltage profile. When placing DERs, consideration of constraints like size, location, number, type, and power factor (PF) should be considered. For optimal placement, renewable and nonrenewable DERs are considered. The effects of different types and PFs of DER placements have been tested on the IEEE 33 bus RDN to satisfy all limitations. Using various intelligent techniques, distributed energy resource units of optimal type, PF, size, quantity, and position were placed in the IEEE 33 bus RDN. These intelligent strategies for minimizing power loss, enhancing the voltage profile, and increasing the convergence rate are based on an adaptive neuro-fuzzy inference system, a genetic algorithm, and enhanced particle swarm optimization.

| [1] |
Abbasi F, Hosseini SM (2016) Optimal DG allocation and sizing in presence of storage systems considering network configuration effects in distribution systems. IET Trans Gener, Transm Distrib 10: 617–624. https://doi.org/10.1049/iet-gtd.2015.0367 doi: 10.1049/iet-gtd.2015.0367

|
| [2] |
Brahma SM, Girgis AA (2004) Development of adaptive protection scheme for distribution systems with high penetration of distributed generation. IEEE Trans Power Delivery 19: 56–63. https://doi.org/10.1109/TPWRD.2003.820204 doi: 10.1109/TPWRD.2003.820204
|
| [3] |
Desouza MFZ, Reis Y, Almeida AB, et al. (2014) Load margin assessment of systems with distributed generation with the help of a neuro-fuzzy method. IET Renewable Power Gener 9: 331–339. https://doi.org/10.1049/iet-rpg.2014.0090 doi: 10.1049/iet-rpg.2014.0090
|
| [4] |
Devabalaji KR, Yuvraj T, Ravi K (2018) An efficient method for solving the optimal sitting and sizing problem of capacitor banks based on cuckoo search algorithm. Ain Shams Eng J 9: 589–597. https://doi.org/10.1016/j.asej.2016.04.005 doi: 10.1016/j.asej.2016.04.005
|
| [5] |
Ibrahim AM, Khattam WE, Mesallamy ME, et al. (2016) Adaptive protection coordination scheme for distribution network with distributed generation using ABC. Int J Electr Syst Inf Technol 3: 320–332. https://doi.org/10.1016/j.jesit.2015.11.012 doi: 10.1016/j.jesit.2015.11.012
|
| [6] |
Ahmadi M, Adewuyi OB, Danish MS, et al. (2021) Optimum coordination of centralized and distributed renewable power generation incorporating battery storage system into the electric distribution network. Int J Electr Power Energy Syst 125: 106458. https://doi.org/10.1016/j.ijepes.2020.106458 doi: 10.1016/j.ijepes.2020.106458
|
| [7] |
Ahmadi M, Lotfy ME, Shigenobu R, et al. (2019) Optimal sizing of multiple renewable energy resources and PV inverter reactive power control encompassing environmental, technical, and economic issues. IEEE Syst J 13: 3026–3037. https://doi.org/10.1109/JSYST.2019.2918185 doi: 10.1109/JSYST.2019.2918185
|
| [8] |
Zhang X, Ruiz HS, Geng J, et al. (2017) Optimal location and minimum number of superconducting fault current limiters for the protection of power grids. Int J Electr Power Energy Syst 87: 136–143. https://doi.org/10.1016/j.ijepes.2016.11.014 doi: 10.1016/j.ijepes.2016.11.014
|
| [9] |
Ahmadi M, Lotfy ME, Shigenobu R, et al. (2018) Optimal sizing and placement of rooftop solar photovoltaic at Kabul city real distribution network. IET Gener Transm Dis 12: 303–309. https://doi.org/10.1049/iet-gtd.2017.0687 doi: 10.1049/iet-gtd.2017.0687
|
| [10] |
Ahmadi M, Lotfy ME, Danish MS, et al. (2019) Optimal multi-configuration and allocation of SVR, capacitor, centralised wind farm, and energy storage system: a multi-objective approach in a real distribution network. IET Renewable Power Gener 13: 762–773. https://doi.org/10.1049/iet-rpg.2018.5057 doi: 10.1049/iet-rpg.2018.5057
|
| [11] |
Ma J, Zhang W, Liu J, et al. (2018) A novel adaptive distance protection scheme for DFIG wind farm collector lines. Int J Electr Power Energy Syst 94: 234–244. https://doi.org/10.1016/j.ijepes.2017.07.008 doi: 10.1016/j.ijepes.2017.07.008
|
| [12] | Gill A, Singh P (2021) Optimal penetration of distributed generation system in radial distribution network using adaptive scheme. J Physics: Conference Series 1914 012027: 1–6. https://doi.org/10.1088/1742-6596/1914/1/012027 |
| [13] |
Gill A, Choudhary A, Bali H (2021) Renewable distributed generations optimal penetration in the distribution network for clean and green energy. Asian J Water Environ Pollut 18: 37–43. https://doi.org/10.3233/AJW210017 doi: 10.3233/AJW210017
|
| [14] |
Gupta A, Kumar A, Khatod DK (2019) Optimized scheduling of hydropower with increase in solar and wind installations. Energy 183: 716–732. https://doi.org/10.1016/j.energy.2019.06.112 doi: 10.1016/j.energy.2019.06.112
|
| [15] |
Naik SG, Khatod DK, Sharma MP (2013) Optimal allocation of combined DG and capacitor for real power loss minimization in distribution networks. Int J Electr Power Energy Syst 53: 967–973. https://doi.org/10.1016/j.ijepes.2013.06.008 doi: 10.1016/j.ijepes.2013.06.008
|
| [16] |
Agrawal H, Talwariya A, Gill A, et al. (2022) A Fuzzy-Genetic-Based integration of renewable energy sources and E-Vehicles. Energies 15: 3300. https://doi.org/10.3390/en15093300 doi: 10.3390/en15093300
|
| [17] |
Hashemi F, Ghadimi N, Sobhani B (2013) Islanding detection for inverter-based DG coupled with using an adaptive neuro-fuzzy inference system. Int J Electr Power Energy Syst 45: 443–455. https://doi.org/10.1016/j.ijepes.2012.09.008 doi: 10.1016/j.ijepes.2012.09.008
|
| [18] |
Basser H, Karami H, Shamshirband S, et al. (2015) Hybrid ANFIS–PSO approach for predicting optimum parameters of a protective spur dike. Int J Appl Soft Comput 30: 642–649. https://doi.org/10.1016/j.asoc.2015.02.011 doi: 10.1016/j.asoc.2015.02.011
|
| [19] |
Akbari K, Rahmani E, Abbasi A, et al. (2016) Optimal placement of distributed generation in radial networks considering reliability and cost indices. J Intell Fuzzy Syst 30: 1077–1086. https://doi.org/10.3233/IFS-151883 doi: 10.3233/IFS-151883
|
| [20] |
Gill A, Choudhary A, Bali H (2022) Placement of renewable distributed energy resources in the radial distribution network to overcome the losses and air pollution. Asian J Water Environ Pollut 19: 119–125. https://doi.org/10.3233/AJW220096 doi: 10.3233/AJW220096
|
| [21] |
Ahmadi M, Danish MS, Lotfy ME, et al. (2019) Multi-objective time-variant optimum automatic and fixed type of capacitor bank allocation considering minimization of switching steps. AIMS Energy 7: 792–818. https://doi.org/10.3934/energy.2019.6.792 doi: 10.3934/energy.2019.6.792
|
| [22] |
Bali H, Gill A, Choudhary A, et al. (2022) Multi-Objective energy efficient adaptive whale optimization based routing for wireless sensor network. Energies 15: 5237. https://doi.org/10.3390/en15145237 doi: 10.3390/en15145237
|
| [23] | Gill A, Choudhary A, Bali H, et al. (2021) Impact of DGs power factor on voltage profile and power losses of distribution network. Int J Tech Phys Probl Eng 13: 1–6. |
Figures(5) / Tables(3)

Amandeep Gill, Pushpendra Singh, Jalpa H. Jobanputra, Mohan Lal Kolhe. Placement analysis of combined renewable and conventional distributed energy resources within a radial distribution network[J]. AIMS Energy, 2022, 10(6): 1216-1229. doi: 10.3934/energy.2022057







 DownLoad:
DownLoad: