Citation: Jingwen Zhang, Lu Wang, Huolin Chen, Tieying Yin, Yanqun Teng, Kang Zhang, Donghong Yu, Guixue Wang. Effect of Caspase Inhibitor Ac-DEVD-CHO on Apoptosis of Vascular Smooth Muscle Cells Induced by Artesunate[J]. AIMS Bioengineering, 2014, 1(1): 13-24. doi: 10.3934/bioeng.2014.1.13

| [1] |
Clarke MC, Figg N, Maguire JJ, et al. (2006) Apoptosis of vascular smooth muscle cells induces features of plaque vulnerability in atherosclerosis. Nat Med 12: 1075-1080. doi: 10.1038/nm1459

|
| [2] |
Scott S, O'Sullivan M, Hafizi S, et al. (2002) Human vascular smooth muscle cells from restenosis or in-stent stenosis sites demonstrate enhanced responses to p53: implications for brachytherapy and drug treatment for restenosis. Circ Res 90: 398-404. doi: 10.1161/hh0402.105900
|
| [3] |
Erl W (2005) Statin-induced vascular smooth muscle cell apoptosis: a possible role in the prevention of restenosis? Curr Drug Targets Cardiovasc Haematol Disord 5: 135-144. doi: 10.2174/1568006043586134
|
| [4] | Liu X (2006) Recent development of Artesunate. Chinese Journal of New Drugs 15:1918-1923. |
| [5] |
Chen HH, Zhou HJ, Wu GD, et al. (2004) Inhibitory effects of Artesunate on angiogenesis and on expressions of vascular endothelial growth factor and VEGF receptor KDR/flk-1. Pharmacology 71: 1-9. doi: 10.1159/000076256
|
| [6] | Berger TG, Dieckmann D, Efferth T, et al. (2005) Artesunate in the treatment of metastatic uveal melanoma——first experiences. Oncol Rep 14: 1599-1603. |
| [7] |
Wu GD, Zhou HJ, Wu XH, et al. (2004) Apoptosis of human umbilical vein endothelial cells induced by artesunate. Vascul Pharmacol 41: 205-212. doi: 10.1016/j.vph.2004.11.001
|
| [8] |
He RR, Zhou HJ (2008) Progress in research on the anti-tumor effect of Artesunate. Chin J Integr Med 14: 312-316. doi: 10.1007/s11655-008-0312-0
|
| [9] |
Li S, Xue F, Cheng Z, et al. (2009) Effect of Artesunate on inhibiting proliferation and inducing apoptosis of SP2/0 myeloma cells through affecting NFkappaB p65. Int J Hematol 90: 513-521. doi: 10.1007/s12185-009-0409-z
|
| [10] | Zheng JS, Wang MH, Huang M, et al. (2008) Artesunate suppresses human endometrial carcinoma RL95-2 cell proliferation by inducing cell apoptosis. Nan Fang Yi Ke Da Xue Xue Bao 28: 2221-2223. |
| [11] |
Hou J, Wang D, Zhang R, et al. (2008) Experimental therapy of hepatoma with artemisinin and its derivatives: in vitro and in vivo activity, chemosensitization, and mechanisms of action. Clin Cancer Res 14: 5519-5530. doi: 10.1158/1078-0432.CCR-08-0197
|
| [12] | Sieber S, Gdynia G, Roth W, et al. (2009) Combination treatment of malignant B cells using the anti-CD20 antibody rituximab and the anti-malarial Artesunate. Int J Oncol 35: 149-158. |
| [13] |
Xiao SH, Mei JY, Jiao PY (2011) Effect of mefloquine administered orally at single, multiple, or combined with artemether, Artesunate, or praziquantel in treatment of mice infected with Schistosoma japonicum. Parasitol Res 108: 399-406. doi: 10.1007/s00436-010-2080-y
|
| [14] |
Keiser J, Xiao S, Smith TA, et al. (2009) Combination Chemotherapy against Clonorchis sinensis: Experiments with Artemether, Artesunate, OZ78, Praziquantel, and Tribendimidine in a Rat Model. Antimicrob Agents Chemother 53: 3770-3776. doi: 10.1128/AAC.00452-09
|
| [15] | Rinner B, Siegl V, Pürstner P, et al. (2004) Activity of novel plant extracts against medullary thyroid carcinoma cells. Anticancer Res 24: 495-500. |
| [16] |
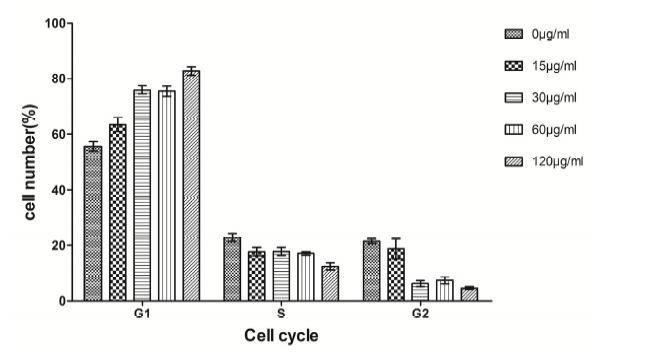
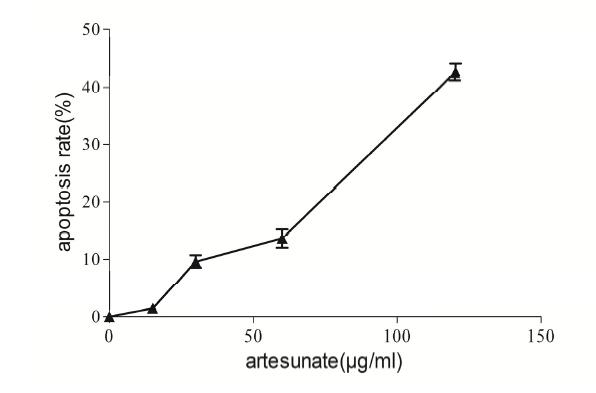
Zhou Z, Feng Y (2005) Artesunate reduces proliferation, interferes DNA replication and cell cycle and enhances apoptosis in vascular smooth muscle cells. J Huazhong Univ Sci Technolog Med Sci 25: 135-136. doi: 10.1007/BF02873558
|
| [17] | Liao H (2006) Effects of Artesunate on the the proliferation and apoptosis of rat aortic vascular smooth muscle cells in vitro. Huazhong University of Science and Technology [Ph.D Dissertation]. |
| [18] |
Pan W, da Graca LS, Shao Y, et al. (2009) PHAPI/pp32 suppresses tumorigenesis by stimulating apoptosis. J Biol Chem 284: 6946-6954. doi: 10.1074/jbc.M805801200
|
| [19] |
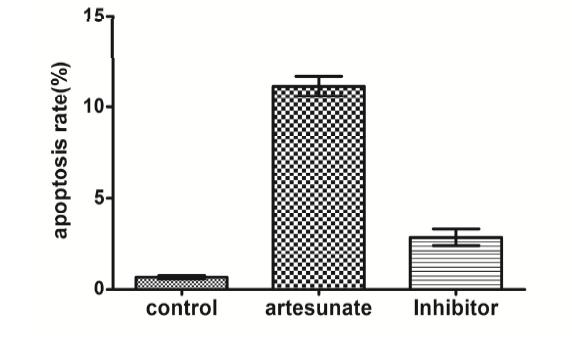
LuYY, Chen TS, Qu JL, et al. (2009) Dihydroartemisinin (DHA) induces caspase-3-dependent apoptosis in human lung adenocarcinoma ASTC-a-1 cells. J Biomed Sci 16:16. doi: 10.1186/1423-0127-16-16
|
| [20] |
Bratton SB, MacFarlane M, Cain K, et al. (2000) Protein complexes activate distinct caspase cascades in death receptor and stress-induced apoptosis. Exp Cell Res 256: 27-33. doi: 10.1006/excr.2000.4835
|
| [21] |
Cho SG, Choi EJ (2002) Apoptotic signaling pathways: caspases and stress-activated protein kinases. J Biochem Mol Biol 35: 24-27. doi: 10.5483/BMBRep.2002.35.1.024
|
| [22] |
Enari M, Sakahira H, Yokoyama H, et al. (1998) A caspase-activated DNase that degrades DNA during apoptosis, and its inhibitor ICAD. Nature 391: 43-50. doi: 10.1038/34112
|
| [23] |
Korn C, Scholz SR, Gimadutdinow O, et al. (2002) Involvement of conserved histidine, lysine and tyrosine residues in the mechanism of DNA cleavage by the caspase-3 activated DNase CAD. Nucleic Acids Res 30: 1325-1332. doi: 10.1093/nar/30.6.1325
|
Figures(8)

Jingwen Zhang, Lu Wang, Huolin Chen, Tieying Yin, Yanqun Teng, Kang Zhang, Donghong Yu, Guixue Wang. Effect of Caspase Inhibitor Ac-DEVD-CHO on Apoptosis of Vascular Smooth Muscle Cells Induced by Artesunate[J]. AIMS Bioengineering, 2014, 1(1): 13-24. doi: 10.3934/bioeng.2014.1.13







 DownLoad:
DownLoad: