According to Moreau (C.I.M.E. 1973), plastically deforming springs of lattice spring systems with a time-dependent displacement-controlled loading correspond to the attractor of a differential inclusion with a moving constraint of the form $ C(t) = C+c(t) $, where $ C $ is a polytope and $ c(t) $ is a time-dependent vector. Finite-time stability of differential inclusions of this type is established in Gudoshnikov et al. [SIAM J. Control Optim. 60 (2022)]. The work by Moreau also implies that accounting for a stress-controlled loading no longer allows to split $ C(t) $ as $ C+c(t) $. In the present paper we show that if we are interested in attractivity of a particular vertex of $ C(t) $, then $ C(t) $ can again be viewed as $ C+c(t) $ for a specially constructed $ c(t) $ (which depends on the vertex of interest), so that the technique of Gudoshnikov et al. can be used to obtain a criterion for finite-time stability of the vertex. The criterion obtained is illustrated with a benchmark example where we discover a drastic increase of diversity of possible combinations of plastically deforming springs when stress-controlled loading is introduced on top of displacement-controlled loading compared to the case where displacement-controlled loading is the only forcing.
Citation: Sakshi Malhotra, Oleg Makarenkov. Finite-time stability of elastoplastic lattice spring systems under simultaneous displacement-controlled and stress-controlled loadings[J]. Mathematics in Engineering, 2025, 7(3): 208-227. doi: 10.3934/mine.2025010
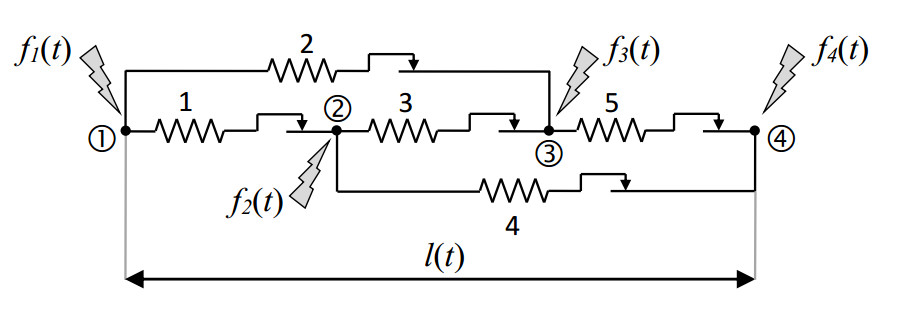
According to Moreau (C.I.M.E. 1973), plastically deforming springs of lattice spring systems with a time-dependent displacement-controlled loading correspond to the attractor of a differential inclusion with a moving constraint of the form $ C(t) = C+c(t) $, where $ C $ is a polytope and $ c(t) $ is a time-dependent vector. Finite-time stability of differential inclusions of this type is established in Gudoshnikov et al. [SIAM J. Control Optim. 60 (2022)]. The work by Moreau also implies that accounting for a stress-controlled loading no longer allows to split $ C(t) $ as $ C+c(t) $. In the present paper we show that if we are interested in attractivity of a particular vertex of $ C(t) $, then $ C(t) $ can again be viewed as $ C+c(t) $ for a specially constructed $ c(t) $ (which depends on the vertex of interest), so that the technique of Gudoshnikov et al. can be used to obtain a criterion for finite-time stability of the vertex. The criterion obtained is illustrated with a benchmark example where we discover a drastic increase of diversity of possible combinations of plastically deforming springs when stress-controlled loading is introduced on top of displacement-controlled loading compared to the case where displacement-controlled loading is the only forcing.

| [1] | S. Adly, H. Attouch, A. Cabot, Finite time stabilization of nonlinear oscillators subject to dry friction, In: P. Alart, O. Maisonneuve, R. T. Rockafellar, Nonsmooth mechanics and analysis, Advances in Mechanics and Mathematics, Springer, 12 (2006), 289–304. https://doi.org/10.1007/0-387-29195-4_24 |
| [2] | R. B. Bapat, Graphs and matrices, Universitext, 1 Ed., Springer, 2010. https://doi.org/10.1007/978-1-84882-981-7 |
| [3] | H. H. Bauschke, P. L. Combettes, Convex analysis and monotone operator theory in Hilbert spaces, 2 Eds., Springer, 2017. https://doi.org/10.1007/978-3-319-48311-5 |
| [4] |
E. Bernuau, A. Polyakov, D. Efimov, W. Perruquetti, Verification of ISS, iISS and IOSS properties applying weighted homogeneity, Syst. Control Lett., 62 (2013), 1159–1167. https://doi.org/10.1016/j.sysconle.2013.09.004 doi: 10.1016/j.sysconle.2013.09.004

|
| [5] |
S. P. Bhat, D. S. Bernstein, Continuous finite-time stabilization of the translational and rotational double integrators, IEEE Trans. Automat. Contr., 43 (1998), 678–682. https://doi.org/10.1109/9.668834 doi: 10.1109/9.668834
|
| [6] |
C. Bouby, G. de Saxcé, J. B. Tritsch, A comparison between analytical calculations of the shakedown load by the bipotential approach and step-by-step computations for elastoplastic materials with nonlinear kinematic hardening, Int. J. Solids Struct., 43 (2006), 2670–2692. https://doi.org/10.1016/j.ijsolstr.2005.06.042 doi: 10.1016/j.ijsolstr.2005.06.042
|
| [7] |
G. Colombo, P. Gidoni, E. Vilches, Stabilization of periodic sweeping processes and asymptotic average velocity for soft locomotors with dry friction, Discrete Contin. Dyn. Syst., 42 (2022), 737–757. https://doi.org/10.3934/dcds.2021135 doi: 10.3934/dcds.2021135
|
| [8] |
I. Gudoshnikov, M. Kamenskii, O. Makarenkov, N. Voskovskaia, One-period stability analysis of polygonal sweeping processes with application to an elastoplastic model, Math. Model. Nat. Phenom., 15 (2020), 25. https://doi.org/10.1051/mmnp/2019030 doi: 10.1051/mmnp/2019030
|
| [9] |
I. Gudoshnikov, O. Makarenkov, Stabilization of the response of cyclically loaded lattice spring models with plasticity, ESAIM: COCV, 27 (2021), S8. https://doi.org/10.1051/cocv/2020043 doi: 10.1051/cocv/2020043
|
| [10] |
I. Gudoshnikov, O. Makarenkov, Structurally stable families of periodic solutions in sweeping processes of networks of elastoplastic springs, Phys. D, 406 (2020), 132443. https://doi.org/10.1016/j.physd.2020.132443 doi: 10.1016/j.physd.2020.132443
|
| [11] |
I. Gudoshnikov, O. Makarenkov, D. Rachinskii, Finite-time stability of polyhedral sweeping processes with application to elastoplastic systems, SIAM J. Control Optim., 60 (2022), 1320–1346. https://doi.org/10.1137/20M1388796 doi: 10.1137/20M1388796
|
| [12] |
I. Gudoshnikov, O. Makarenkov, D. Rachinskii, Formation of a nontrivial finite-time stable attractor in a class of polyhedral sweeping processes with periodic input, ESAIM: COCV, 29 (2023), 84. https://doi.org/10.1051/cocv/2023074 doi: 10.1051/cocv/2023074
|
| [13] | P. Krejčí, Hysteresis, convexity and dissipation in hyperbolic equations, Tokyo: Gakkotosho, 1996. |
| [14] | M. Kunze, M. D. P. M. Marques, An introduction to Moreau's sweeping process, In: B. Brogliato, Impacts in mechanical systems, Lecture Notes in Physics, Springer, 551 (2000), 1–60. https://doi.org/10.1007/3-540-45501-9_1 |
| [15] | J. J. Moreau, On unilateral constraints, friction and plasticity, In: G. Capriz, G. Stampacchia, New variational techniques in mathematical physics, C.I.M.E. Summer Schools, Springer, 63 (1974), 171–322. https://doi.org/10.1007/978-3-642-10960-7_7 |
| [16] |
H. B. Oza, Y. V. Orlov, S. K. Spurgeon, Continuous uniform finite time stabilization of planar controllable systems, SIAM J. Control Optim., 53 (2015), 1154–1181. https://doi.org/10.1137/120877155 doi: 10.1137/120877155
|
| [17] |
D. Rachinskii, On geometric conditions for reduction of the Moreau sweeping process to the Prandtl-Ishlinskii operator, Discrete Contin. Dyn. Syst., 23 (2018), 3361–3386. https://doi.org/10.3934/dcdsb.2018246 doi: 10.3934/dcdsb.2018246
|
| [18] | R. T. Rockafellar, R. J. B. Wets, Variational analysis, Grundlehren der mathematischen Wissenschaften, Vol. 317, Springer, 1998. https://doi.org/10.1007/978-3-642-02431-3 |
| [19] |
T. Sanchez, J. A. Moreno, L. M. Fridman, Output feedback continuous twisting algorithm, Automatica, 96 (2018), 298–305. https://doi.org/10.1016/j.automatica.2018.06.049 doi: 10.1016/j.automatica.2018.06.049
|
| [20] | H. S. Yu, Plasticity and geotechnics, Advances in Mechanics and Mathematics, Vol. 13, Springer, 2006. https://doi.org/10.1007/978-0-387-33599-5 |
| [21] |
N. Zouain, R. SantAnna, Computational formulation for the asymptotic response of elastoplastic solids under cyclic loads, Eur. J. Mech., 61 (2017), 267–278. https://doi.org/10.1016/j.euromechsol.2016.09.013 doi: 10.1016/j.euromechsol.2016.09.013
|
Figures(1)

Sakshi Malhotra, Oleg Makarenkov. Finite-time stability of elastoplastic lattice spring systems under simultaneous displacement-controlled and stress-controlled loadings[J]. Mathematics in Engineering, 2025, 7(3): 208-227. doi: 10.3934/mine.2025010







 DownLoad:
DownLoad: