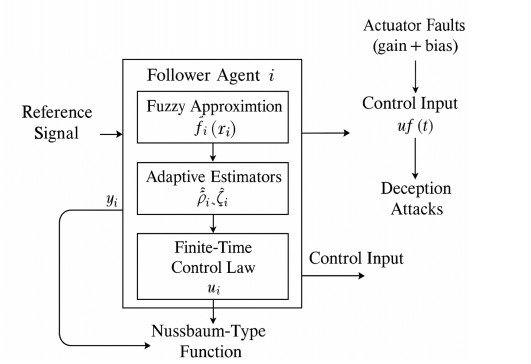
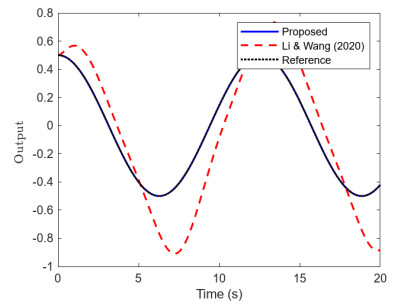
In this paper, we addressed the issue of maintaining a desirable level of performance in the presence of actuator faults and deception attacks in nonlinear multi-agent systems (MASs). These problems are critical for the stability and coordination of MASs that are increasingly used in robotics, autonomous vehicles, and industrial automation. Our aim was to design control strategies that, in the presence of these challenges, guarantee practical finite-time stability and robust tracking performance. To accomplish this, a distributed adaptive fuzzy control scheme based on backstepping was developed. Fuzzy logic systems were utilized to capture the complex system's unknown nonlinearities, while adaptive laws were designed to estimate and mitigate actuator gain and bias faults. A Nussbaum-type function was introduced to address unknown control directions resulting from deception attacks. Stability was verified by the Lyapunov theory. The suggested approach ensured that it was a finite-time stable method, and every signal in the closed loop was found to be semi-globally uniformly eventually bounded. Our control strategy, compared to published approaches, improved convergence time by approximately 38% and tracking accuracy of approximately 35% under the same conditions of simultaneous actuator faults and deception attacks.
Citation: Hanen Louati, Rohma Arooj, Azmat Ullah Khan Niazi, Mhassen. E. E. Dalam, Mohammed M. A. Almazah, Aseel Smerat. Finite-time fuzzy control strategy for nonlinear MASs with actuator faults and deception attacks[J]. AIMS Mathematics, 2025, 10(9): 20113-20139. doi: 10.3934/math.2025899
In this paper, we addressed the issue of maintaining a desirable level of performance in the presence of actuator faults and deception attacks in nonlinear multi-agent systems (MASs). These problems are critical for the stability and coordination of MASs that are increasingly used in robotics, autonomous vehicles, and industrial automation. Our aim was to design control strategies that, in the presence of these challenges, guarantee practical finite-time stability and robust tracking performance. To accomplish this, a distributed adaptive fuzzy control scheme based on backstepping was developed. Fuzzy logic systems were utilized to capture the complex system's unknown nonlinearities, while adaptive laws were designed to estimate and mitigate actuator gain and bias faults. A Nussbaum-type function was introduced to address unknown control directions resulting from deception attacks. Stability was verified by the Lyapunov theory. The suggested approach ensured that it was a finite-time stable method, and every signal in the closed loop was found to be semi-globally uniformly eventually bounded. Our control strategy, compared to published approaches, improved convergence time by approximately 38% and tracking accuracy of approximately 35% under the same conditions of simultaneous actuator faults and deception attacks.

| [1] |
Y. Sun, P. Shi, C. C. Lim, Adaptive consensus control for output-constrained nonlinear multi-agent systems with actuator faults, J. Franklin Inst., 359 (2022), 4216–4232. https://doi.org/10.1016/j.jfranklin.2022.03.025 doi: 10.1016/j.jfranklin.2022.03.025

|
| [2] |
X. Z. Ju, Y. S. Jiang, L. Jing, P. Liu, Quantized predefined-time control for heavy-lift launch vehicles under actuator faults and rate gyro malfunctions, ISA Trans., 138 (2023), 133–150. https://doi.org/10.1016/j.isatra.2023.02.022 doi: 10.1016/j.isatra.2023.02.022
|
| [3] |
L. Zhao, G. H. Yang, Adaptive fault-tolerant control for nonlinear multi-agent systems with DoS attacks, Inform. Sci., 526 (2020), 39–53. https://doi.org/10.1016/j.ins.2020.03.083 doi: 10.1016/j.ins.2020.03.083
|
| [4] |
S. D. Zhi, H. K. Shen, T. Y. Wang, Gearbox localized fault detection based on meshing frequency modulation analysis, Appl. Acoust., 219 (2024), 109943. https://doi.org/10.1016/j.apacoust.2024.109943 doi: 10.1016/j.apacoust.2024.109943
|
| [5] |
X. Y. Jiang, C. Zheng, Y. Zhuo, X. Y. Kong, Z. Q. Ge, Z. H. Song, Advancing industrial data augmentation in AIGC era: from foundations to frontier applications, IEEE Trans. Instrum. Meas., 74 (2025), 1–22. https://doi.org/10.1109/TIM.2025.3572162 doi: 10.1109/TIM.2025.3572162
|
| [6] |
S. P. Luo, D. Ye, Adaptive double event-triggered control for linear multi-agent systems with actuator faults, IEEE Trans. Circuits Syst. I. Regul. Pap., 66 (2019), 4829–4839. https://doi.org/10.1109/TCSI.2019.2932084 doi: 10.1109/TCSI.2019.2932084
|
| [7] |
Z. S. Zhou, Y. F. Wang, G. F. Zhou, K. Nam, Z. W. Ji, C. L. Yin, A twisted Gaussian risk model considering target vehicle longitudinal-lateral motion states for host vehicle trajectory planning, IEEE Trans. Intell. Transp. Syst., 24 (2023), 13685–13697. https://doi.org/10.1109/TITS.2023.3298110 doi: 10.1109/TITS.2023.3298110
|
| [8] |
G. F. Du, H. Z. Zhang, H. B. Yu, P. Hou, J. B. He, S. X. Cao, Study on automatic tracking system of microwave deicing device for railway contact wire, IEEE Trans. Instrum. Meas., 73 (2024), 1–11. https://doi.org/10.1109/TIM.2024.3446638 doi: 10.1109/TIM.2024.3446638
|
| [9] |
F. Ding, K. C. Zhu, J. Liu, C. Peng, Y. F. Wang, J. G. Lu, Adaptive memory event triggered output feedback finite-time lane keeping control for autonomous heavy truck with roll prevention, IEEE Trans. Fuzzy Syst., 73 (2024), 6607–6621. https://doi.org/10.1109/TFUZZ.2024.3454344 doi: 10.1109/TFUZZ.2024.3454344
|
| [10] |
W. Wu, S. C. Tong, Fuzzy adaptive consensus control for nonlinear multiagent systems with intermittent actuator faults, IEEE Trans. Cybernet., 53 (2023), 2969–2979. https://doi.org/10.1109/TCYB.2021.3123788 doi: 10.1109/TCYB.2021.3123788
|
| [11] |
X. Y. Zhang, Y. H. Liu, X. K. Chen, Z. Li, C. Y. Su, Adaptive pseudoinverse control for constrained hysteretic nonlinear systems and its application on dielectric elastomer actuator, IEEE/ASME Trans. Mech., 28 (2023), 2142–2154. https://doi.org/10.1109/TMECH.2022.3231263 doi: 10.1109/TMECH.2022.3231263
|
| [12] |
W. Wang, J. M. Liang, H. B. Zeng, Sampled-data-based stability and stabilization of Lurie systems, Appl. Math. Comput., 501 (2025), 129455. https://doi.org/10.1016/j.amc.2025.129455 doi: 10.1016/j.amc.2025.129455
|
| [13] |
H. F. Ye, Y. D. Song, Z. R. Zhang, C. Y. Wen, Global dynamic event-triggered control for nonlinear systems with sensor and actuator faults: a matrix-pencil-based approach, IEEE Trans. Automat. Control, 69 (2024), 2007–2014. https://doi.org/10.1109/TAC.2023.3313634 doi: 10.1109/TAC.2023.3313634
|
| [14] |
H. Wang, Y. F. Li, T. L. Men, L. S. Li, Physically interpretable wavelet-guided networks with dynamic frequency decomposition for machine intelligence fault prediction, IEEE Trans. Syst. Man Cybernet. Syst., 54 (2024), 4863–4875. https://doi.org/10.1109/TSMC.2024.3389068 doi: 10.1109/TSMC.2024.3389068
|
| [15] |
E. Nazemorroaya, M. Hashemi, Adaptive sliding mode controller design for the bipartite consensus tracking of multi-agent systems with actuator faults and disturbances, Int. J. Automat. Control, 16 (2022), 288–302. https://doi.org/10.1504/IJAAC.2022.122598 doi: 10.1504/IJAAC.2022.122598
|
| [16] |
C. W. Zhang, M. H. Liu, Z. H. Liu, R. Sabetahd, H. Taghavifar, A. Mohammadzadeh, A multiple model type-3 fuzzy control for offshore wind turbines using the Active Rotary Inertia Driver (ARID), Ocean Eng., 313 (2024), 119337. https://doi.org/10.1016/j.oceaneng.2024.119337 doi: 10.1016/j.oceaneng.2024.119337
|
| [17] |
Y. R. Li, Y. X. Jiang, J. Y. Lu, C. Tan, Improved active disturbance rejection control for electro-hydrostatic actuators via actor-critic reinforcement learning, Eng. Appl. Artif. Intell., 158 (2025), 111485. https://doi.org/10.1016/j.engappai.2025.111485 doi: 10.1016/j.engappai.2025.111485
|
| [18] |
H. F. Ye, C. Y. Wen, Y. D. Song, Decentralized and distributed control of large-scale interconnected multi-agent systems in prescribed time, IEEE Trans. Automat. Control, 70 (2025), 1115–1130. https://doi.org/10.1109/TAC.2024.3451213 doi: 10.1109/TAC.2024.3451213
|
| [19] |
W. Wang, J. M. Liang, H. B. Zeng, X. M. Zhang, Novel looped functionals in designing output feedback controllers for aperiodic sampled-data control systems, IEEE Trans. Automat. Sci. Eng., 22 (2025), 16397–16402. https://doi.org/10.1109/TASE.2025.3573304 doi: 10.1109/TASE.2025.3573304
|
| [20] |
H. H. Liu, S. C. Zhen, X. L. Liu, H. M. Zheng, L. S. Gao, Y. H. Chen, Robust approximate constraint following control design for collaborative robots system and experimental validation, Robotica, 42 (2024), 3957–3975. https://doi.org/10.1017/S0263574724001760 doi: 10.1017/S0263574724001760
|
| [21] |
P. Zhang, H. F. Xue, S. Gao, X. Zuo, J. L. Zhang, Finite-time adaptive cooperative fault-tolerant control for multi-agent system with hybrid actuator faults, IEEE Syst. J., 16 (2022), 3590–3601. https://doi.org/10.1109/JSYST.2021.3097503 doi: 10.1109/JSYST.2021.3097503
|
| [22] |
M. Wei, S. W. Yang, W. Wu, B. Sun, A multi-objective fuzzy optimization model for multi-type aircraft flight scheduling problem, Transport, 39 (2024), 313–322. https://doi.org/10.3846/transport.2024.20536 doi: 10.3846/transport.2024.20536
|
| [23] | Q. B. Wang, L. Q. Chen, G. Xiao, P. Wang, Y. J. Gu, J. W. Lu, Elevator fault diagnosis based on digital twin and PINNs-e-RGCN, Scientific reports, 14 (2024), 30713. https://doi.org/10.1038/s41598-024-78784-7 |
| [24] |
X. Y. Li, J. Z. Wang, Fault-tolerant tracking control for a class of nonlinear multi-agent systems, Syst. Control Lett., 135 (2020), 104576. https://doi.org/10.1016/j.sysconle.2019.104576 doi: 10.1016/j.sysconle.2019.104576
|
| [25] |
F. L. Wang, K. Chen, S. C. Zhen, X. F. Chen, H. M. Zheng, Z. D. Wang, Prescribed performance adaptive robust control for robotic manipulators with fuzzy uncertainty, IEEE Trans. Fuzzy Syst., 32 (2024), 1318–1330. https://doi.org/10.1109/TFUZZ.2023.3323090 doi: 10.1109/TFUZZ.2023.3323090
|
| [26] |
C. Deng, G. H. Yang, Adaptive fault-tolerant control for a class of nonlinear multi-agent systems with actuator faults, J. Franklin Inst., 354 (2017), 4784–4800. https://doi.org/10.1016/j.jfranklin.2017.05.034 doi: 10.1016/j.jfranklin.2017.05.034
|
| [27] |
S. D. Zhi, K. Y. Su, J. Yu, X. Y. Li, H. K. Shen, An unsupervised transfer learning bearing fault diagnosis method based on multi-channel calibrated transformer with shiftable window, Struct. Health Monit., 2025. https://doi.org/10.1177/14759217251324671 doi: 10.1177/14759217251324671
|
| [28] |
C. E. Ren, Q. X. Fu, J. Zhang, J. S. Zhao, Adaptive event-triggered control for nonlinear multi-agent systems with unknown control directions and actuator failures, Nonlinear Dyn., 105 (2021), 1657–1672. https://doi.org/10.1007/s11071-021-06684-w doi: 10.1007/s11071-021-06684-w
|
| [29] |
T. Y. Wang, M. Liang, J. Y. Li, W. D. Cheng, Rolling element bearing fault diagnosis via fault characteristic order (FCO) analysis, Mech. Syst. Signal Process., 45 (2014), 139–153. https://doi.org/10.1016/j.ymssp.2013.11.011 doi: 10.1016/j.ymssp.2013.11.011
|
| [30] |
J. Hang, G. P. Qiu, M. L. Hao, S. C. Ding, Improved fault diagnosis method for permanent magnet synchronous machine system based on lightweight multisource information data layer fusion, IEEE Trans. Power Electron., 39 (2024), 13808–13817. https://doi.org/10.1109/TPEL.2024.3432163 doi: 10.1109/TPEL.2024.3432163
|
| [31] |
X. Deng, X. P. Liu, Y. Cui, C. G. Liu, Adaptive fuzzy cooperative control for nonlinear multiagent systems with unknown control coefficient and actuator fault, Complexity, 2021 (2021), 8427437. https://doi.org/10.1155/2021/8427437 doi: 10.1155/2021/8427437
|
| [32] |
Z. Q. Bai, W. S. Bi, S. Sui, S. C. Tong, C. L. P. Chen, Adaptive finite‐time fuzzy secure control for nonlinear MASs under deception attacks, Int. J. Robust Nonlinear Control, 34 (2024), 5647–5663. https://doi.org/10.1002/rnc.7286 doi: 10.1002/rnc.7286
|
| [33] |
W. Lin, C. J. Qian, Adaptive control of nonlinearly parameterized systems: the smooth feedback case, IEEE Trans. Automat. Control, 47 (2002), 1249–1266. https://doi.org/10.1109/TAC.2002.800773 doi: 10.1109/TAC.2002.800773
|
| [34] |
H. F. Ye, C. Y. Wen, Y. D. Song, Decentralized prescribed-time control for interconnected nonlinear systems via output-feedback, Automatica, 163 (2024), 111571. https://doi.org/10.1016/j.automatica.2024.111571 doi: 10.1016/j.automatica.2024.111571
|
| [35] |
H. F. Ye, Y. D. Song, A separation principle for the prescribed-time stabilization of a class of nonlinear systems, Automatica, 171 (2025), 111983. https://doi.org/10.1016/j.automatica.2024.111983 doi: 10.1016/j.automatica.2024.111983
|
| [36] |
H. F. Ye, K. Zhao, H. J. Wu, Y. D. Song, Adaptive control with global exponential stability for parameter-varying nonlinear systems under unknown control gains, IEEE Trans. Cybernet., 53 (2023), 7858–7867. https://doi.org/10.1109/TCYB.2022.3232115 doi: 10.1109/TCYB.2022.3232115
|
| [37] |
L. Zhang, L. F. Wang, J. Y. Zhang, Q. Z. Wu, L. R. Jiang, Y. Shi, et al., Fault diagnosis of energy storage batteries based on dual driving of data and models, J. Energy Storage, 112 (2025), 115485. https://doi.org/10.1016/j.est.2025.115485 doi: 10.1016/j.est.2025.115485
|
| [38] |
H. D. Zhou, S. C. Tong, Fuzzy adaptive resilient formation control for nonlinear multiagent systems subject to DoS attacks, IEEE Trans. Fuzzy Syst., 32 (2024), 1446–1454. https://doi.org/10.1109/TFUZZ.2023.3327140 doi: 10.1109/TFUZZ.2023.3327140
|
| [39] |
J. W. Hui, J. Q. Yuan, Neural network-based adaptive fault-tolerant control for load following of a MHTGR with prescribed performance and CRDM faults, Energy, 257 (2022), 124663. https://doi.org/10.1016/j.energy.2022.124663 doi: 10.1016/j.energy.2022.124663
|
| [40] |
J. W. Hui, Y. K. Lee, J. Q. Yuan, Adaptive active fault-tolerant dynamic surface load following controller for a modular high-temperature gas-cooled reactor, Appl. Thermal Eng., 230 (2023), 120727. https://doi.org/10.1016/j.applthermaleng.2023.120727 doi: 10.1016/j.applthermaleng.2023.120727
|
| [41] |
J. W. Hui, J. Q. Yuan, Load following control of a pressurized water reactor via finite-time super-twisting sliding mode and extended state observer techniques, Energy, 241 (2022), 122836. https://doi.org/10.1016/j.energy.2021.122836 doi: 10.1016/j.energy.2021.122836
|
Figures(17) / Tables(2)

Hanen Louati, Rohma Arooj, Azmat Ullah Khan Niazi, Mhassen. E. E. Dalam, Mohammed M. A. Almazah, Aseel Smerat. Finite-time fuzzy control strategy for nonlinear MASs with actuator faults and deception attacks[J]. AIMS Mathematics, 2025, 10(9): 20113-20139. doi: 10.3934/math.2025899







 DownLoad:
DownLoad: