A previously unknown relationship between the tidal forces and aa index is shown and used to discuss when the next maximum of the annual aa index is expected to occur.
Citation: Mikhail Kovalyov. On the relationship between the aa index and tidal forces[J]. AIMS Geosciences, 2021, 7(4): 582-588. doi: 10.3934/geosci.2021034
A previously unknown relationship between the tidal forces and aa index is shown and used to discuss when the next maximum of the annual aa index is expected to occur.

| [1] | Andrault D, Monteux J, Le Bars M, et al. (2016) The deep Earth may not be cooling down. Earth Planet Sci Lett 443: 195–203. |
| [2] | Mendoza B, Pazos M, Gonzalez L (2016) New perspectives on contributing factors to the monthly behavior of the aa geomagnetic index. Earth Planets Space 68: 200. Available from: https://doi.org/10.1186/s40623-016-0569-z. |
| [3] | Sceince News, The Moon may play a major role in maintaining Earth's magnetic field. 2016. Available from: https://www.sciencedaily.com/releases/2016/04/160401075118.htm. |
| [4] | Sky at night, Is the Moon maintaining Earth's magnetism? 2018. Available from: https://www.skyatnightmagazine.com/news/is-the-moon-maintaining-earths-magnetism/. |
| [5] | Chapman S, Home R, Watkins N (2020) Using the aa index over the last 14 solar cycles to characterize extreme geomagnetic activity. Geophys Res Lett 47: e2019GL086524. |
| [6] | Du Z (2020) Predicting the maximum aa/Ap index through its relationship with the preceding minimum. Ann Geophys. Available from: https://angeo.copernicus.org/preprints/angeo-2020-15/angeo-2020-15.pdf. |
| [7] | AA index, Available from: http://isgi.unistra.fr/indices_aa.php or http://www.geomag.bgs.ac.uk/data_service/data/magnetic_indices/aaindex.html46976. |
| [8] | Solar flares: the most powerful solar flares known. Available from: https://www.spaceweatherlive.com/en/solar-activity/top-50-solar-flares.html, http://www.ioffe.ru/LEA/Solar/1994_en.html, https://www.spaceweather.com/solarflares/topflares.html, https://www.sws.bom.gov.au/Educational/2/3/9, https://www.ngdc.noaa.gov/stp/solar/solarflares.html. |
| [9] | Geomagnetic storms: the most pwoerful geomagntic storms known. Available from: https://en.wikipedia.org/wiki/List_of_solar_storms, https://www.spaceweatherlive.com/en/auroral-activity/top-50-geomagnetic-storms. |
| [10] | Lunar Data. Available from: https://www.fourmilab.ch/earthview/pacalc.html, http://www.csgnetwork.com/lunarpandacalc.html, http://astropixels.com/ephemeris/moon/moonnodes2001.html. |
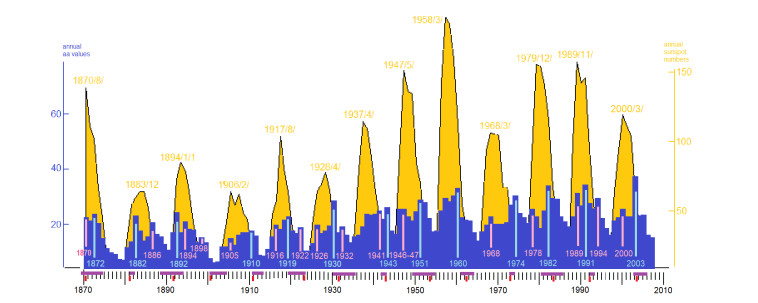
| [11] | NOAA, Annual sunspots and aa index. Available from: https://www.ngdc.noaa.gov/stp/geomag/image/aassn07.jpg. |
| [12] | AA index, graphs for 2000–2020. Available from: https://www.spaceweatherlive.com/community/topic/1553-ap-aa-indices-and-solar-minimum/, https://twitter.com/peikko763/status/1235142277842046976. |
Figures(1) / Tables(3)

Mikhail Kovalyov. On the relationship between the aa index and tidal forces[J]. AIMS Geosciences, 2021, 7(4): 582-588. doi: 10.3934/geosci.2021034







 DownLoad:
DownLoad: