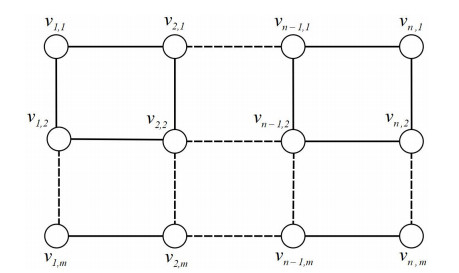
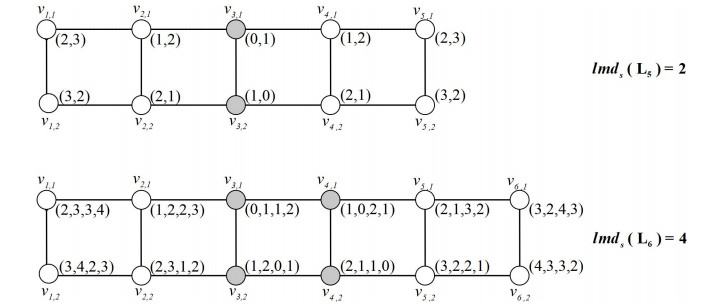
The local metric dimension is one of many topics in graph theory with several applications. One of its applications is a new model for assigning codes to customers in delivery services. Let $ G $ be a connected graph and $ V(G) $ be a vertex set of $ G $. For an ordered set $ W = \{ x_1, x_2, \ldots, x_k\} \subseteq V(G) $, the representation of a vertex $ x $ with respect to $ W $ is $ r_G(x|W) = \{(d(x, x_1), d(x, x_2), \ldots, d(x, x_k) \} $. The set $ W $ is said to be a local metric set of $ G $ if $ r(x|W)\neq r(y|W) $ for every pair of adjacent vertices $ x $ and $ y $ in $ G $. The eccentricity of a vertex $ x $ is the maximum distance between $ x $ and all other vertices in $ G $. Among all vertices in $ G $, the smallest eccentricity is called the radius of $ G $ and a vertex whose eccentricity equals the radius is called a central vertex of $ G $. In this paper, we developed a new concept, so-called the central local metric dimension by combining the concept of local metric dimension with the central vertex of a graph. The set $ W $ is a central local metric set if $ W $ is a local metric set and contains all central vertices of $ G $. The minimum cardinality of a central local metric set is called a central local metric dimension of $ G $. In the main result, we introduce the definition of the central local metric dimension of a graph and some properties, then construct the central local metric dimensions for trees and establish results for the grid graph.
Citation: Yuni Listiana, Liliek Susilowati, Slamin Slamin, Fadekemi Janet Osaye. A central local metric dimension on acyclic and grid graph[J]. AIMS Mathematics, 2023, 8(9): 21298-21311. doi: 10.3934/math.20231085
The local metric dimension is one of many topics in graph theory with several applications. One of its applications is a new model for assigning codes to customers in delivery services. Let $ G $ be a connected graph and $ V(G) $ be a vertex set of $ G $. For an ordered set $ W = \{ x_1, x_2, \ldots, x_k\} \subseteq V(G) $, the representation of a vertex $ x $ with respect to $ W $ is $ r_G(x|W) = \{(d(x, x_1), d(x, x_2), \ldots, d(x, x_k) \} $. The set $ W $ is said to be a local metric set of $ G $ if $ r(x|W)\neq r(y|W) $ for every pair of adjacent vertices $ x $ and $ y $ in $ G $. The eccentricity of a vertex $ x $ is the maximum distance between $ x $ and all other vertices in $ G $. Among all vertices in $ G $, the smallest eccentricity is called the radius of $ G $ and a vertex whose eccentricity equals the radius is called a central vertex of $ G $. In this paper, we developed a new concept, so-called the central local metric dimension by combining the concept of local metric dimension with the central vertex of a graph. The set $ W $ is a central local metric set if $ W $ is a local metric set and contains all central vertices of $ G $. The minimum cardinality of a central local metric set is called a central local metric dimension of $ G $. In the main result, we introduce the definition of the central local metric dimension of a graph and some properties, then construct the central local metric dimensions for trees and establish results for the grid graph.

| [1] | R. Diestel, Graphs theory, New York: Springer-Verlag Heidelberg, 2005. |
| [2] | G. Chartrand, L. Lesniak, P. Zhang, Graphs & Digraphs, 6 Eds., New York: Chapman and Hall/CRC, 2015. https://doi.org/10.1201/b19731 |
| [3] | P. Slater, Dominating and reference sets in a graph, J. Math. Phys. Sci., 22 (1988), 445–455. |
| [4] | F. Harary, R. A. Melter, On the metric dimension of a graph, Ars Combinatoria, 2 (1976), 191–195. |
| [5] |
G. Chartrand, L. Eroh, M. A. Johnson, O. R. Oellermann, Resolvability in graphs and the metric dimension of a graph, Discrete. Appl. Math., 105 (2000), 99–113. http://dx.doi.org/10.1016/S0166-218X(00)00198-0. doi: 10.1016/S0166-218X(00)00198-0

|
| [6] |
L. Susilowati, A. Nurrona, U. Purwati, The complement metric dimension of the joint graph, AAIP Conf. P., 2329 (2021), 020003. http://dx.doi.org/10.1063/5.0042149 doi: 10.1063/5.0042149
|
| [7] |
M. Feng, B. Lv, K. Wang, On the fractional metric dimension of graphs, Discrete Appl. Math., 170 (2014), 55–63. http://dx.doi.org/10.1016/J.DAM.2014.01.006 doi: 10.1016/J.DAM.2014.01.006
|
| [8] |
J. R. Velázquez, I. Yero, D. Kuziak, O. Oellermann, On the strong metric dimension of cartesian and direct products of graphs, Discrete Math., 335 (2014), 8–19. http://dx.doi.org/10.1016/j.disc.2014.06.023 doi: 10.1016/j.disc.2014.06.023
|
| [9] |
L. Susilowati, I. Saadah, R. Z. Fauziyyah, A. Erfanian, S. Slamin, The dominant metric dimension of graphs, Heliyon, 6 (2020), e03633. https://doi.org/10.1016/j.heliyon.2020.e03633 doi: 10.1016/j.heliyon.2020.e03633
|
| [10] |
A. Kelenc, D. Kuziak, A. Taranenko, I. Yero, Mixed metric dimension of graphs, Appl. Math. Comput., 314 (2017), 429–438. http://dx.doi.org/10.1016/j.amc.2017.07.027 doi: 10.1016/j.amc.2017.07.027
|
| [11] |
A. Kelenc, N. Tratnik, I. Yero, Uniquely identifying the edges of a graph: The edge metric dimension, Discrete Appl. Math., 251 (2018), 204–220. http://dx.doi.org/10.1016/j.dam.2018.05.052 doi: 10.1016/j.dam.2018.05.052
|
| [12] |
M. Basak, L. Saha, G. Das, T. Kalishankar, Fault-tolerant metric dimension of circulant graphs $C_n(1, 2, 3)$, Theor. Comput. Sci., 817 (2020), 66–79. http://dx.doi.org/10.1016/j.tcs.2019.01.011 doi: 10.1016/j.tcs.2019.01.011
|
| [13] |
L. Saha, B. Das, T. Kalishankar, D. K. Chandra, S. Yilun, Optimal multi-level fault-tolerant resolving sets of circulant graph $C(n:1, 2)$, Mathematics, 11 (2023), 1–16. http://dx.doi.org/10.3390/math11081896 doi: 10.3390/math11081896
|
| [14] |
F. Okamoto, L. Crosse, B. Phinezy, P. Zhang, The local metric dimension of a graph, Math. Bohem., 135 (2010), 239–255. http://dx.doi.org/10.21136/mb.2010.140702 doi: 10.21136/mb.2010.140702
|
| [15] | H. Benish, M. Murtaza, I. Javaid, The fractional local metric dimension of graphs, arXiv: 1810.02882, 2018. https://arXiv.org/abs/1810.02882v1 |
| [16] |
G. B. Ramírez, J. R. Velázquez, The local metric dimension of strong product graphs, Graph. Combinator., 32 (2016), 1263–1278. http://dx.doi.org/10.1007/S00373-015-1653-Z doi: 10.1007/S00373-015-1653-Z
|
| [17] | R. Umilasari, L. Susilowati, S. Slamin, S. Prabhu, On the dominant local metric dimension of corona product graphs, IAENG Int. J. Appl. Math., 52 (2022), 1098–1104. |
| [18] |
L. Susilowati, S. Slamin, M. I. Utoyo, N. Estuningsih, The similarity of metric dimension and local metric dimension of rooted product graph, Far East J. Math. Sci., 97 (2015), 841–856. http://dx.doi.org/10.17654/FJMSAug2015_841_856 doi: 10.17654/FJMSAug2015_841_856
|
| [19] |
L. Susilowati, M. I. Utoyo, S. Slamin, On commutative characterization of generalized comb and corona products of graphs with respect to the local metric dimension, Far East J. Math. Sci., 100 (2016), 643–660. http://dx.doi.org/10.17654/MS100040643 doi: 10.17654/MS100040643
|
| [20] |
L. Susilowati, M. I. Utoyo, S. Slamin, On commutative characterization of graph operation with respect to metric dimension, J. Math. Fundam. Sci., 49 (2017), 156–170. http://dx.doi.org/10.5614/J.MATH.FUND.SCI.2017.49.2.5 doi: 10.5614/J.MATH.FUND.SCI.2017.49.2.5
|
| [21] |
S. Klavžar, M. Tavakoli, Local metric dimension of graphs: Generalized hierarchical products and some applications, Appl. Math. Comput., 364 (2020). http://dx.doi.org/10.1016/j.amc.2019.124676 doi: 10.1016/j.amc.2019.124676
|
| [22] | F. Harary, Graph theory, USA: Addison-Wesley Publishing Company, 1969. https://doi.org/10.21236/AD0705364 |
| [23] | J. Bondy, U. Murty, Graphs theory, New York: Springer, 2008. http://dx.doi.org/10.1007/978-1-84628-970-5 |
Figures(6)

Yuni Listiana, Liliek Susilowati, Slamin Slamin, Fadekemi Janet Osaye. A central local metric dimension on acyclic and grid graph[J]. AIMS Mathematics, 2023, 8(9): 21298-21311. doi: 10.3934/math.20231085







 DownLoad:
DownLoad: