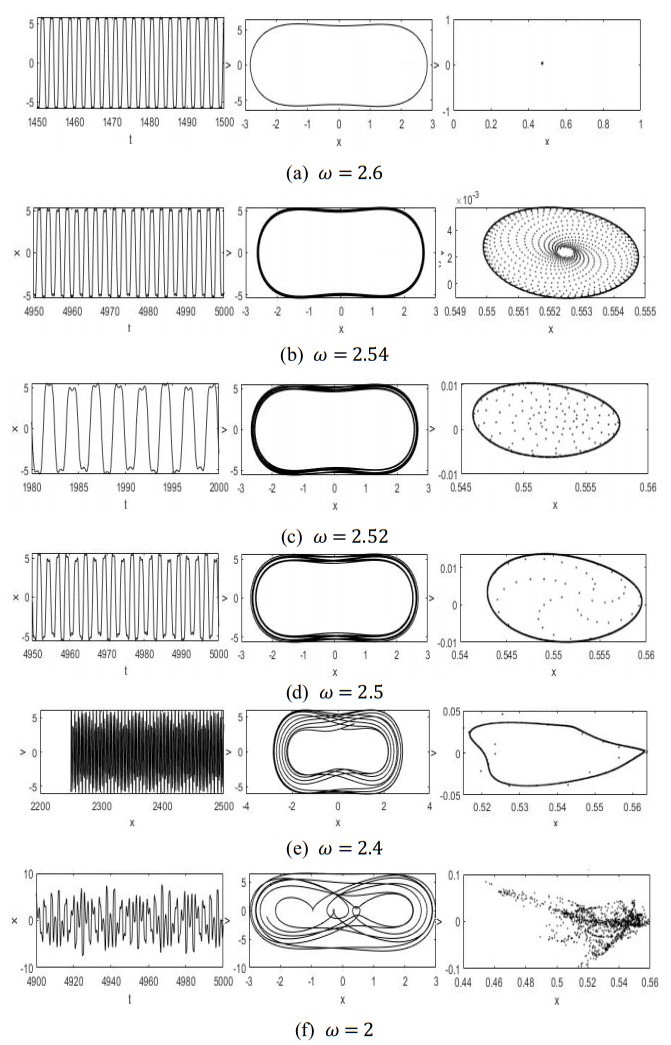
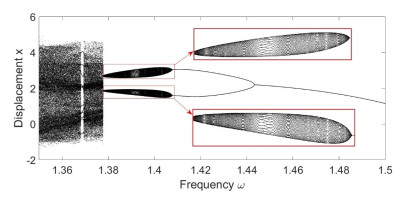
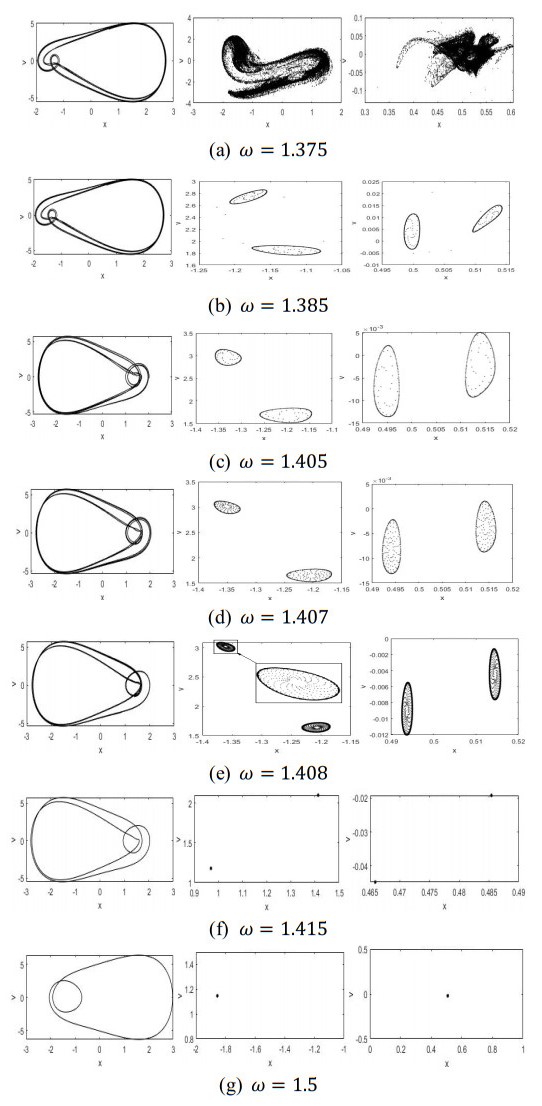
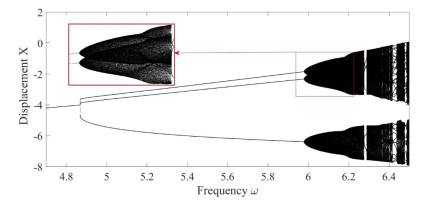
Nonlinear tuned mass dampers (TMDs) are widely recognized for their superior damping perfor-mance, which stems from their broad damping bandwidth. In this study, we propose a sin-gle-pendulum TMD for application in vibration absorption within train compressors to protect crit-ical components. However, the inherent nonlinear vibration characteristics of the TMD may under-mine its damping effectiveness. To address this challenge, we develop a three-degree-of-freedom mechanical model of a train compressor integrated with a single-pendulum TMD. The equations of motion for the system are derived using the second kind of Lagrange formula. By employing the fourth-order Runge-Kutta numerical integration method and using the excitation frequency as the bifurcation parameter, we analyze the bifurcation behavior and the transition to chaos via the Poin-caré cross-section method. Our results demonstrate that the system can transition to chaos through multiple routes, including multiplicative bifurcation, Hopf bifurcation, and residual-dimension bi-furcation, depending on the excitation frequency. These findings provide critical insights for the dynamic design and chaotic motion prediction of single-pendulum TMD systems, offering practical guidance to enhance their reliability and performance in real-world applications.
Citation: Danyang Wang, Ning Chen. Research on Hopf bifurcation of vehicle air compressor system with single-pendulum TMD[J]. Electronic Research Archive, 2025, 33(5): 3285-3304. doi: 10.3934/era.2025145
Nonlinear tuned mass dampers (TMDs) are widely recognized for their superior damping perfor-mance, which stems from their broad damping bandwidth. In this study, we propose a sin-gle-pendulum TMD for application in vibration absorption within train compressors to protect crit-ical components. However, the inherent nonlinear vibration characteristics of the TMD may under-mine its damping effectiveness. To address this challenge, we develop a three-degree-of-freedom mechanical model of a train compressor integrated with a single-pendulum TMD. The equations of motion for the system are derived using the second kind of Lagrange formula. By employing the fourth-order Runge-Kutta numerical integration method and using the excitation frequency as the bifurcation parameter, we analyze the bifurcation behavior and the transition to chaos via the Poin-caré cross-section method. Our results demonstrate that the system can transition to chaos through multiple routes, including multiplicative bifurcation, Hopf bifurcation, and residual-dimension bi-furcation, depending on the excitation frequency. These findings provide critical insights for the dynamic design and chaotic motion prediction of single-pendulum TMD systems, offering practical guidance to enhance their reliability and performance in real-world applications.

| [1] | J. Zhang, Z. Xiang, Q. Zhang, S. Feng, Z. Yu, X. Wang, et al., A method to improve the tribological performance of Cu-based powder metallurgy friction materials for the high-speed trains braking system: Enhancement of the performance of the friction block disc spring, Wear, 566–567 (2025), 205751.https://doi.org/10.1016/j.wear.2025.205751 |
| [2] |
Y. Lin, Y. Qin, J. Wu, M. Xu, Impact of high-speed rail on road traffic and greenhouse gas emissions, Nat. Clim. Change, 11 (2021), 952–957. https://doi.org/10.1038/s41558-021-01190-8 doi: 10.1038/s41558-021-01190-8

|
| [3] |
S. Zhong, K. Ou, Z. Jin, Q. Zhang, X. Zhang, Y. X. Wang, Improved optimal sliding mode control and operating strategy for turbine-based air compressor in automotive fuel cells with driving cycles analysis, Energy, 324 (2025), 135743. https://doi.org/10.1016/j.energy.2025.135743 doi: 10.1016/j.energy.2025.135743
|
| [4] |
Y. Wu, H. Bao, J. Fu, X. Wang, J. Liu, Review of recent developments in fuel cell centrifugal air compressor: Comprehensive performance and testing techniques, Int. J. Hydrogen Energy, 48 (2023), 32039–32055. https://doi.org/10.1016/j.ijhydene.2023.04.262 doi: 10.1016/j.ijhydene.2023.04.262
|
| [5] |
F. Braghin, S. Bruni, F. Resta, Active yaw damper for the improvement of railway vehicle stability and curving performances: Simulations and experimental results, Veh. Syst. Dyn. , 44 (2006), 857–869. https://doi.org/10.1080/00423110600733972 doi: 10.1080/00423110600733972
|
| [6] |
Z. Guo, L. Dai, M. Chi, Y. Li, J. Sun, Numerical and experimental study on adaptive stiffness yaw damper for suppressing abnormal vibration of high-speed trains, Trans. Can. Soc. Mech. Eng. , 49 (2025), 24–34. https://doi.org/10.1139/tcsme-2024-0087 doi: 10.1139/tcsme-2024-0087
|
| [7] |
H. Li, K. Bi, Q. Han, R. Ma, A state-of-the-art review on negative stiffness-based structural vibration control, Eng. Struct. , 323 (2025), 119247. https://doi.org/10.1016/j.engstruct.2024.119247 doi: 10.1016/j.engstruct.2024.119247
|
| [8] | S. J. Patil, G. R. Reddy, State of art review-base isolation systems for structures, Int. J. Emerging Technol. Adv. Eng. , 2 (2012), 438–453. |
| [9] |
D. D. Tandel, P. Wahi, A. Chatterjee, Ensuring supercritical Hopf bifurcation in tool chatter using a nonresonant limit cycle absorber, J. Sound Vib. , 604 (2025), 118958. https://doi.org/10.1016/j.jsv.2025.118958 doi: 10.1016/j.jsv.2025.118958
|
| [10] |
J. Dai, Z. D. Xu, P. P. Gai, H. W. Li, Effect of frequency dependence of large mass ratio viscoelastic tuned mass damper on seismic performance of structures, Soil Dyn. Earthquake Eng. , 130 (2020), 105998. https://doi.org/10.1016/j.soildyn.2019.105998 doi: 10.1016/j.soildyn.2019.105998
|
| [11] |
S. Jiang, K. Bi, R. Ma, K. Xu, H∞ closed-form solution of tuned mass damper enhanced with negative stiffness element (TMD-NS) for structural vibration control, J. Sound Vib. , 586 (2024), 118510. https://doi.org/10.1016/j.jsv.2024.118510 doi: 10.1016/j.jsv.2024.118510
|
| [12] |
J. Song, K. Bi, R. Ma, K. Xu, Q. Han, Optimum design and performance evaluation of inerter‐based dampers for seismic protection of adjacent bridges, Structures, 55 (2023), 1277–1291. https://doi.org/10.1016/j.istruc.2023.06.093 doi: 10.1016/j.istruc.2023.06.093
|
| [13] |
K. Xu, Q. Dai, K. Bi, G. Fang, Y. Ge, Closed‐form design formulas of TMDI for suppressing vortex‐induced vibration of bridge structures, Struct. Control Health Monit. , 29 (2022), e3016. https://doi.org/10.1002/stc.3016 doi: 10.1002/stc.3016
|
| [14] |
H. Yu, O. Øiseth, M. Zhang, F. Xu, G. Hu, Tuned mass damper design for vortex-induced vibration control of a bridge: influence of vortex-induced force model, J. Bridge Eng. , 28 (2023), 04023021. https://doi.org/10.1061/JBENF2.BEENG-5958 doi: 10.1061/JBENF2.BEENG-5958
|
| [15] |
M. Zhang, F. Xu, Tuned mass damper for self-excited vibration control: Optimization involving nonlinear aeroelastic effect, J. Wind Eng. Ind. Aerodyn. , 220 (2022), 104836. https://doi.org/10.1016/j.jweia.2021.104836 doi: 10.1016/j.jweia.2021.104836
|
| [16] |
X. Fang, H. Hao, K. Bi, H. Ding, X. Yang, J. Song, et al., Seismic response control of shear frame structure using a novel tuned-mass type composite column, Eng. Struct. , 322 (2025), 119160. https://doi.org/10.1016/j.engstruct.2024.119160 doi: 10.1016/j.engstruct.2024.119160
|
| [17] |
S. Jiang, R. Ma, K. Bi, H. Li, X. Du, Negative stiffness enhanced TMD for seismic response mitigation of bridges isolated with friction pendulum system (FPS), Eng. Struct. , 331 (2025), 119978. https://doi.org/10.1016/j.engstruct.2025.119978 doi: 10.1016/j.engstruct.2025.119978
|
| [18] |
T. Zhang, W. Wang, X. Li, W. Shi, Vibration mitigation of an integrated structure consisting of a monopile offshore wind turbine and aquaculture cage under earthquake, wind, and wave loads, Mech. Adv. Mater. Struct. , 30 (2023), 627–646. https://doi.org/10.1080/15376494.2021.2020941 doi: 10.1080/15376494.2021.2020941
|
| [19] |
S. Jiang, R. Ma, K. Bi, X. Du, J. Song, Negative stiffness enhanced tuned mass damper (NS-TMD) for seismic induced response mitigation of isolated bridges, Eng. Struct. , 325 (2025), 119416. https://doi.org/10.1016/j.engstruct.2024.119416 doi: 10.1016/j.engstruct.2024.119416
|
| [20] |
F. Nikravesh, H. Toopchi-Nezhad, Application of viscoelastic tuned mass dampers in vibration mitigation of steel joist jack arch floor structures, Shock Vib. , 2022 (2022), 5196600. https://doi.org/10.1155/2022/5196600 doi: 10.1155/2022/5196600
|
| [21] |
L. Wang, S. Nagarajaiah, Y. Zhou, W. Shi, Experimental study on adaptive-passive tuned mass damper with variable stiffness for vertical human-induced vibration control, Eng. Struct. , 280 (2023), 115714. https://doi.org/10.1016/j.engstruct.2023.115714 doi: 10.1016/j.engstruct.2023.115714
|
| [22] |
J. Jiang, X. Dong, J. Lian, Y. Jia, Research on semi-active vibration reduction of offshore wind turbine structure combined eddy current theory with tuned mass dampers, Renewable Energy, 234 (2024), 121185. https://doi.org/10.1016/j.renene.2024.121185 doi: 10.1016/j.renene.2024.121185
|
| [23] |
Y. Gao, E. Zhai, S. Li, Z. Zhang, Z. Xu, G. Zhang, et al., Integrated design and real-world application of a tuned mass damper (TMD) with displacement constraints for large offshore monopile wind turbines, Ocean Eng. , 292 (2024), 116568. https://doi.org/10.1016/j.oceaneng.2023.116568 doi: 10.1016/j.oceaneng.2023.116568
|
| [24] |
Z. Luan, P. Dou, Y. Chen, H. Zhang, Y. Ku, Optimization study of a tuned mass damper for a large monopile wind turbine, Energies, 17 (2024), 4460. https://doi.org/10.3390/en17174460 doi: 10.3390/en17174460
|
| [25] |
B. Zhu, Y. Wu, C. Sun, D. Sun, An improved inerter-pendulum tuned mass damper and its application in monopile offshore wind turbines, Ocean Eng. , 298 (2024), 117172. https://doi.org/10.1016/j.oceaneng.2024.117172 doi: 10.1016/j.oceaneng.2024.117172
|
| [26] |
W. Jing, J. Feng, S. Song, X. Cheng, Seismic performance improvement of liquid storage tank based on base-isolation and pendulum tuned mass damper, Nucl. Eng. Des. , 417 (2024), 112867. https://doi.org/10.1016/j.nucengdes.2023.112867 doi: 10.1016/j.nucengdes.2023.112867
|
| [27] |
S. W. Shaw, R. Bahadori, Tuning of centrifugal pendulum vibration absorbers operating in a fluid, Nonlinear Dyn. , 112 (2024), 741–755. https://doi.org/10.1007/s11071-023-09087-1 doi: 10.1007/s11071-023-09087-1
|
| [28] |
Y. Yue, C. Li, K. Jia, Y. Zhang, J. Tian, Optimization of the seismic performance of a steel-concrete wind turbine tower with the tuned mass damper, Buildings, 12 (2022), 1474. https://doi.org/10.3390/buildings12091474 doi: 10.3390/buildings12091474
|
| [29] |
N. Sarkar, A. D. Ghosh, Application of conical spring to maintain tuning of mass damper for wave-induced vibration control of offshore jacket platform subjected to changes in natural frequency, Ocean Eng. , 312 (2024), 119352. https://doi.org/10.1016/j.oceaneng.2024.119352 doi: 10.1016/j.oceaneng.2024.119352
|
| [30] |
Z. Q. Hu, L. Yang, Y. S. Wang, L. Wei, Y. Chen, Tuned mass damper on spacecraft reaction wheel assembly, Appl. Acoust. , 210 (2023), 109456. https://doi.org/10.1016/j.apacoust.2023.109456 doi: 10.1016/j.apacoust.2023.109456
|
| [31] |
W. A. Shen, S. Zhu, Y. L. Xu, An experimental study on self-powered vibration control and monitoring system using electromagnetic TMD and wireless sensors, Sensors Actuat. A - Phys. , 180 (2012), 166–176. https://doi.org/10.1016/j.sna.2012.04.011 doi: 10.1016/j.sna.2012.04.011
|
| [32] |
Y. Xiang, P. Tan, H. He, H. Yao, X. Zheng, K. Yang, A novel bi-directional rail variable friction pendulum-tuned mass damper (BRVFP-TMD), Mech. Syst. Signal Process. , 197 (2023), 110396. https://doi.org/10.1016/j.ymssp.2023.110396 doi: 10.1016/j.ymssp.2023.110396
|
| [33] |
L. D. Viet, N. B. Nghi, On a nonlinear single-mass two-frequency pendulum tuned mass damper to reduce horizontal vibration, Eng. Struct. , 81 (2014), 175–180. https://doi.org/10.1016/j.engstruct.2014.09.038 doi: 10.1016/j.engstruct.2014.09.038
|
| [34] |
H. Lv, B. Huang, Vibration reduction performance of a new tuned mass damper with pre-strained superelastic SMA helical springs, Int. J. Struct. Stab. Dyn. , 24 (2024), 2450047. https://doi.org/10.1142/S0219455424500470 doi: 10.1142/S0219455424500470
|
| [35] |
X. Liu, Z. Qu, Y. Huang, A. Wada, Effects of geometric nonlinearities on the vibration reduction performance of tuned mass dampers on top of flexible structures, Adv. Struct. Eng. , 26 (2023), 2565–2571. https://doi.org/10.1177/13694332221149500 doi: 10.1177/13694332221149500
|
| [36] |
H. Sun, H. He, Y. Cheng, S. Cheng, Theoretical and experimental research on damping performance of suspended multiple mass pendulums damper, Structures, 55 (2023), 169–184. https://doi.org/10.1016/j.istruc.2023.06.048 doi: 10.1016/j.istruc.2023.06.048
|
| [37] |
N. Chen, S. Cao, Y. Hou, An indirect harmonic balance method based on frequency response functions simplification for periodical response analysis of local nonlinearity systems, Comput. Struct. , 310 (2025), 107663. https://doi.org/10.1016/j.compstruc.2025.107663 doi: 10.1016/j.compstruc.2025.107663
|
| [38] |
Y. Chen, L. Hou, R. Lin, J. Song, T. Y. Ng, Y. Chen, A harmonic balance method combined with dimension reduction and FFT for nonlinear dynamic simulation, Mech. Syst. Signal Process. , 221 (2024), 111758. https://doi.org/10.1016/j.ymssp.2024.111758 doi: 10.1016/j.ymssp.2024.111758
|
| [39] |
J. H. Kim, J. H. Ri, H. Jang, C. U. Choe, Centrifugal pendulum vibration absorber with geometric nonlinear damping, J. Sound Vib. , 571 (2024), 118031. https://doi.org/10.1016/j.jsv.2023.118031 doi: 10.1016/j.jsv.2023.118031
|
| [40] |
N. Han, H. Zhang, P. Lu, Z. Liu, Resonance response and chaotic analysis for an irrational pendulum system, Chaos, Solitons Fractals, 182 (2024), 114812. https://doi.org/10.1016/j.chaos.2024.114812 doi: 10.1016/j.chaos.2024.114812
|
| [41] |
A. Amer, W. Zhang, T. S. Amer, H. Li, Nonlinear vibration analysis of a 3DOF double pendulum system near resonance, Alexandria Eng. J. , 113 (2025), 262–286. https://doi.org/10.1016/j.aej.2024.11.018 doi: 10.1016/j.aej.2024.11.018
|
| [42] |
B. Nana, S. B. Yamgoué, P. Woafo, Dynamics of an autonomous electromechanical pendulum-like system with experimentation, Chaos, Solitons Fractals, 152 (2021), 111475. https://doi.org/10.1016/j.chaos.2021.111475 doi: 10.1016/j.chaos.2021.111475
|
| [43] |
B. Qin, Y. Zhang, A novel global perspective: Characterizing the fractal basins of attraction and the level of chaos in a double pendulum, Chaos, Solitons Fractals, 189 (2024), 115694. https://doi.org/10.1016/j.chaos.2024.115694 doi: 10.1016/j.chaos.2024.115694
|
| [44] |
X. H. Huang, J. Yang, L. Bai, X. E. Wang, X. Ren, Theoretical solutions for auxetic laminated beam subjected to a sudden load, Structures, 28 (2020), 57–68. https://doi.org/10.1016/j.istruc.2020.08.030 doi: 10.1016/j.istruc.2020.08.030
|
| [45] |
M. J. Wu, X. H. Huang, I. Azim, J. Zhu, H. Chen, Nonlinear dynamic and vibration characteristics of metamaterial shallow arches, Eur. J. Mech. A. Solids, 102 (2023), 105084. https://doi.org/10.1016/j.euromechsol.2023.105084 doi: 10.1016/j.euromechsol.2023.105084
|
| [46] |
M. J. Wu, I. Azim, X. H. Huang, A novel technique for low-velocity impact of shallow arches, Comput. Struct. , 298 (2024), 107386. https://doi.org/10.1016/j.compstruc.2024.107386 doi: 10.1016/j.compstruc.2024.107386
|
| [47] |
Q. Wu, N. Chen, M. Yao, Y. Niu, C. Wang, Nonlinear dynamic analysis of FG fluid conveying micropipes with initial imperfections, Int. J. Struct. Stab. Dyn. , 25 (2025), 2550017. https://doi.org/10.1142/S0219455425500178 doi: 10.1142/S0219455425500178
|
| [48] | Q. Wu, N. Zhao, M. Yao, Y. Niu, C. Wang, Free vibrations and frequency sensitivity of bionic microcantilevers with stress concentration effect, Int. J. Struct. Stab. Dyn., (2025), 2650222.https://doi.org/10.1142/S0219455426502226 |
| [49] |
Y. Li, X. Wang, S. Chen, H. Lu, Nonlinear dynamic response and global stability of an air compressor vibration system, J. Low Freq. Noise Vibr. Act. Control, 38 (2019), 1081–1095. https://doi.org/10.1177/1461348418817695 doi: 10.1177/1461348418817695
|
Figures(14)
Danyang Wang, Ning Chen. Research on Hopf bifurcation of vehicle air compressor system with single-pendulum TMD[J]. Electronic Research Archive, 2025, 33(5): 3285-3304. doi: 10.3934/era.2025145







 DownLoad:
DownLoad: