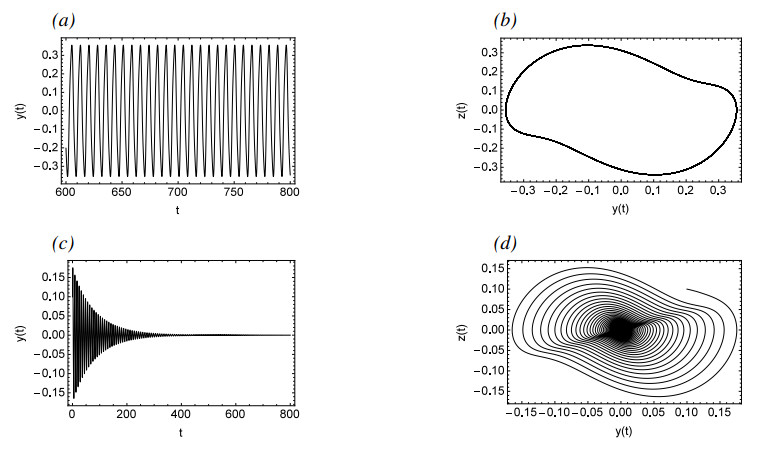
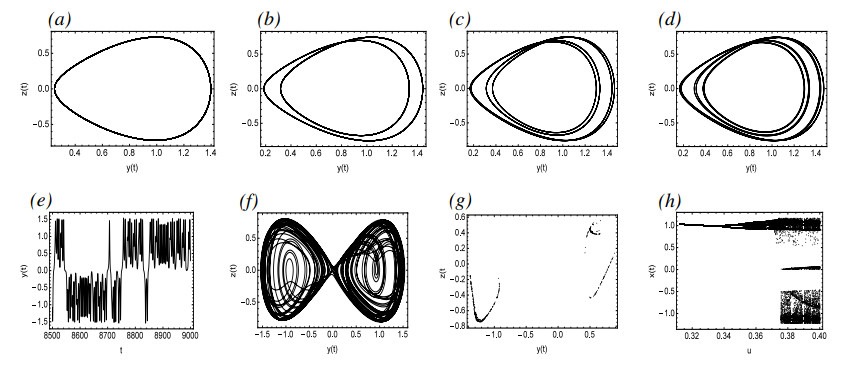
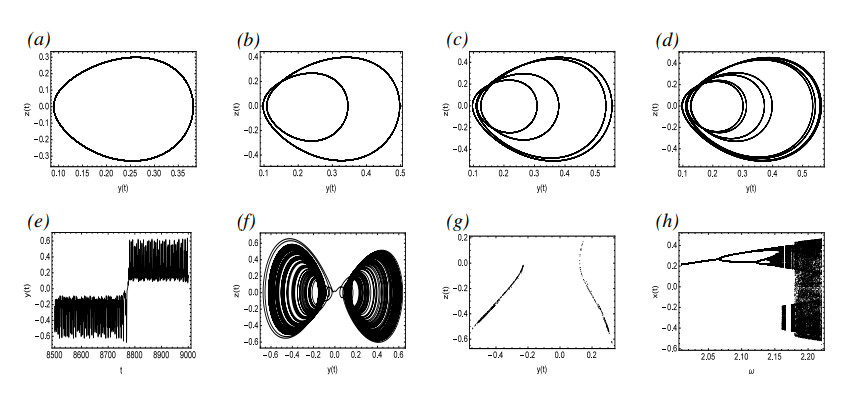
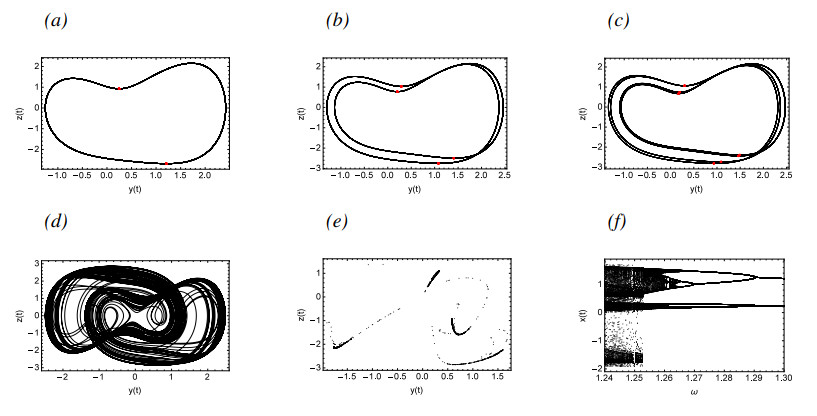
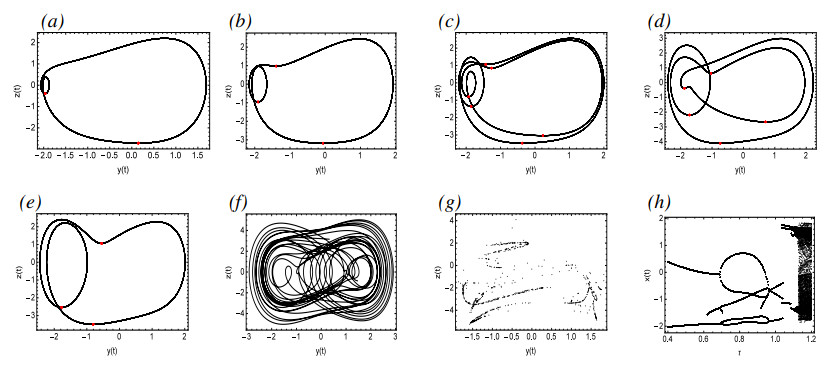
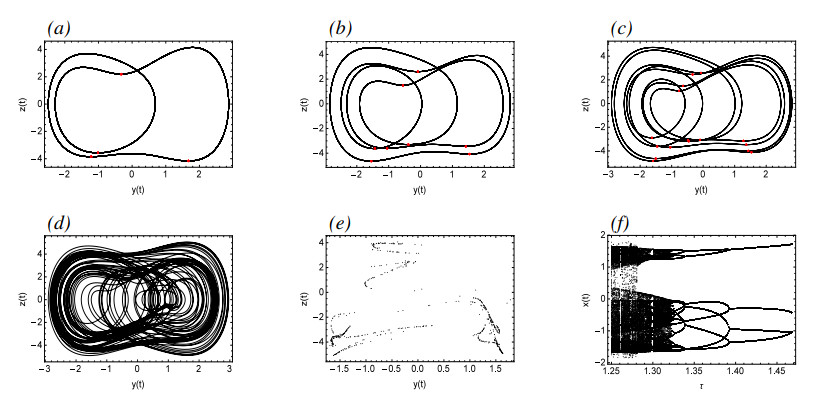
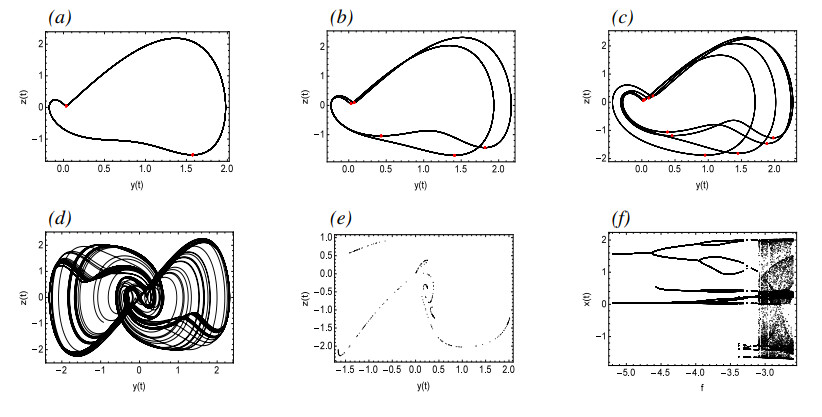
In this paper, we have constructed two muscular blood vessel systems influenced by external disturbances by using the non-autonomous delayed differential equation (DDE). As an important physiological structure of the human body, muscle blood vessels participate in many activities such as blood flow. Many diseases are associated with abnormal dynamics of muscle blood vessels. From a mathematical point of view, vasospasm is caused by a chaotic state of blood vessels. Vasospasm is the manifestation of this disease in the vascular system, which can cause blood vessel blockage and even harm human health when it is serious. We conducted the dynamical analysis of the S-type and N-type muscular blood vessel systems by utilizing bifurcation diagrams, time histories, and pseudo-phase portraits, and investigated the effects of different parameters on these systems. Specifically, when parameters change, rich dynamical phenomena occur, such as equilibria, periodic solutions, quasi-periodic solutions, Hopf bifurcation, and chaos, as well as the route of period-doubling bifurcation to chaos. Meanwhile, we analyzed approximate analytical solutions by using the method of multiple scales (MMS) and determined the stability of steady-state solutions through the Routh-Hurwitz criterion. The results indicate that the MMS can deduce better analytical results for some non-autonomous DDEs.
Citation: Wenxin Zhang, Lijun Pei. Bifurcation and chaos in N-type and S-type muscular blood vessel models[J]. Electronic Research Archive, 2025, 33(3): 1285-1305. doi: 10.3934/era.2025057
In this paper, we have constructed two muscular blood vessel systems influenced by external disturbances by using the non-autonomous delayed differential equation (DDE). As an important physiological structure of the human body, muscle blood vessels participate in many activities such as blood flow. Many diseases are associated with abnormal dynamics of muscle blood vessels. From a mathematical point of view, vasospasm is caused by a chaotic state of blood vessels. Vasospasm is the manifestation of this disease in the vascular system, which can cause blood vessel blockage and even harm human health when it is serious. We conducted the dynamical analysis of the S-type and N-type muscular blood vessel systems by utilizing bifurcation diagrams, time histories, and pseudo-phase portraits, and investigated the effects of different parameters on these systems. Specifically, when parameters change, rich dynamical phenomena occur, such as equilibria, periodic solutions, quasi-periodic solutions, Hopf bifurcation, and chaos, as well as the route of period-doubling bifurcation to chaos. Meanwhile, we analyzed approximate analytical solutions by using the method of multiple scales (MMS) and determined the stability of steady-state solutions through the Routh-Hurwitz criterion. The results indicate that the MMS can deduce better analytical results for some non-autonomous DDEs.

| [1] |
C. Sorensen, J. Hess, Treatment and prevention of heat-related illness, N. Engl. J. Med., 387 (2022), 1404–1413. https://doi.org/10.1056/NEJMcp2210623 doi: 10.1056/NEJMcp2210623

|
| [2] |
N. Gonzalez-Jaramillo, M. Wilhelm, A. M. Arango-Rivas, V. Gonzalez-Jaramillo, C. Mesa-Vieira, B. Minder, et al., Systematic review of physical activity trajectories and mortality in patients with coronary artery disease, J. Am. Coll. Cardiol., 79 (2022), 1690–1700. https://doi.org/10.1016/j.jacc.2022.02.036 doi: 10.1016/j.jacc.2022.02.036
|
| [3] |
F. Alfonso, C. Fernández-Pérez, N. del Prado, M. García-Guimaraes, J. L. Bernal, T. Bastante, et al., Primary percutaneous coronary intervention in patients with spontaneous coronary artery dissection vs coronary artery disease, JACC: Cardiovasc. Interventions, 16 (2023), 1860–1869. https://doi.org/10.1016/j.jcin.2023.05.044 doi: 10.1016/j.jcin.2023.05.044
|
| [4] |
M. T. Nouei, A. V. Kamyad, M. Sarzaeem, S. Ghazalbash, Fuzzy risk assessment of mortality after coronary surgery using combination of adaptive neuro-fuzzy inference system and K-means clustering, Expert Syst., 33 (2016), 230–238. https://doi.org/10.1111/exsy.12145 doi: 10.1111/exsy.12145
|
| [5] |
V. Auffret, C. Ridard, N. Salerno, S. Sorrentino, Unmet needs in TAVR: conduction disturbances and management of coronary artery disease, J. Clin. Med. Res., 11 (2022), 6256. https://doi.org/10.3390/jcm11216256 doi: 10.3390/jcm11216256
|
| [6] |
X. Y. Zhang, H. W. Du, G. Song, F. X. Bao, Y. F. Zhang, W. Wu, et al., X-ray coronary centerline extraction based on C-UNet and a multifactor reconnection algorithm, Comput. Methods Programs Biomed., 226 (2022), 107114. https://doi.org/10.1016/j.cmpb.2022.107114 doi: 10.1016/j.cmpb.2022.107114
|
| [7] |
D. D. Hao, S. Ding, L. W. Qiu, Y. S. Lv, B. W. Fei, Y. Q. Zhu, et al., Sequential vessel segmentation via deep channel attention network, Neural Networks, 128 (2020), 172–187. https://doi.org/10.1016/j.neunet.2020.05.005 doi: 10.1016/j.neunet.2020.05.005
|
| [8] |
A. Kerkeni, A. Benabdallah, A. Manzanera, M. H. Bedoui, A coronary artery segmentation method based on multiscale analysis and region growing, Comput. Med. Imaging Graphics, 48 (2016), 49–61. https://doi.org/10.1016/j.compmedimag.2015.12.004 doi: 10.1016/j.compmedimag.2015.12.004
|
| [9] |
S. Yang, J. Kweon, J. H. Roh, J. H. Lee, H. Kang, L. J. Park, et al., Deep learning segmentation of major vessels in X-ray coronary angiography, Sci. Rep., 9 (2019), 1–11. https://doi.org/10.1038/s41598-019-53254-7 doi: 10.1038/s41598-019-53254-7
|
| [10] |
X. J. Liu, S. Li, B. Wang, L. Xu, Z. F. Gao, G. Yang, Motion estimation based on projective information disentanglement for 3D reconstruction of rotational coronary angiography, Comput. Biol. Med., 157 (2023), 106743. https://doi.org/10.1016/j.compbiomed.2023.106743 doi: 10.1016/j.compbiomed.2023.106743
|
| [11] |
D. M. Bappy, A. Hong, E. Choi, J. O. Park, C. S. Kim, Automated three-dimensional vessel reconstruction based on deep segmentation and bi-plane angiographic projections, Comput. Med. Imaging Graphics, 92 (2021), 101956. https://doi.org/10.1016/j.compmedimag.2021.101956 doi: 10.1016/j.compmedimag.2021.101956
|
| [12] |
M. Hwang, S. B. Hwang, H. Yu, J. Kim, D. Kim, W. Hong, et al., A simple method for automatic 3D reconstruction of coronary arteries from X-Ray angiography, Front. Physiol., 12 (2021), 724216. https://doi.org/10.3389/fphys.2021.724216 doi: 10.3389/fphys.2021.724216
|
| [13] |
H. Y. Yu, H. B. Wang, J. Y. Chang, W. J. Liu, F. H. Wang, J. Y. Niu, Design and evaluation of vascular interventional robot system for complex coronary artery lesions, Med. Biol. Eng. Comput., 61 (2023), 1–16. https://doi.org/10.1007/s11517-023-02775-5 doi: 10.1007/s11517-023-02775-5
|
| [14] | H. J. Li, Y. L. Zhu, L. Jing, W. Ying, Consensus of second-order delayed nonlinear multi-agent systems via node-based distributed adaptive completely intermittent protocols, Appl. Math. Comput., 326 (2018), 1–15. |
| [15] | H. J. Li, J. J. Zhang, L. Jing, W. Ying, Neural-network-based adaptive quasi-consensus of nonlinear multi-agent systems with communication constrains and switching topologies, Nonlinear Anal. Hybrid Syst., 35 (2020), 100833. |
| [16] |
S. B. He, H. Natiq, S. Mukherjee, Multistability and chaos in a noise-induced blood flow, Eur. Phys. J. Spec. Top., 230 (2021), 1525–1533. https://doi.org/10.1140/epjs/s11734-021-00032-0 doi: 10.1140/epjs/s11734-021-00032-0
|
| [17] |
S. B. He, N. A. A. Fataf, S. Banerjee, K. H. Sun, Complexity in the muscular blood vessel model with variable fractional derivative and external disturbances, Physica A, 526 (2019), 120904. https://doi.org/10.1016/j.physa.2019.04.140 doi: 10.1016/j.physa.2019.04.140
|
| [18] |
C. J. Lin, S. K. Yang, H. T. Yau, Chaos suppression control of a coronary artery system with uncertainties by using variable structure control, Comput. Math. Appl., 64 (2012), 988–995. https://doi.org/10.1016/j.camwa.2012.03.007 doi: 10.1016/j.camwa.2012.03.007
|
| [19] | C. Y. Gong, Y. M. Li, X. H. Sun, Backstepping control of synchronization for biomathematical model of muscular blood vessel, J. Appl. Sci., 24 (2006), 604–607. |
| [20] |
P. P. Singh, M. Borah, A. Datta, S. Jafari, B. K. Roy, Integer cum fractional ordered active-adaptive synchronization to control vasospasm in chaotic blood vessels to reduce risk of COVID-19 infections, Int. J. Comput. Math., 102 (2025), 14–28. https://doi.org/10.1080/00207160.2022.2163167 doi: 10.1080/00207160.2022.2163167
|
| [21] | S. H. Gong, M. A. Han, An estimate of the number of limit cycles bifurcating from a planar integrable system, Bull. Sci. Math., 176 (2022), 103118. |
| [22] |
J. Guo, Z. S. Zhao, F. D. Shi, R. K. Wang, S. S. Li, Observer-Based synchronization control for coronary artery time-delay chaotic system, IEEE Access, 7 (2019), 51222–51235. https://doi.org/10.1109/ACCESS.2019.2909749 doi: 10.1109/ACCESS.2019.2909749
|
| [23] |
H. Ding, D. W. Qian, S. Lee, L. L. Zhu, Sliding-mode-based chaos suppression of coronary artery systems, Meas. Control, 56 (2023). https://doi.org/10.1177/00202940231180842 doi: 10.1177/00202940231180842
|
| [24] |
C. Chantawat, T. Botmart, Finite-time $H_{\infty}$ synchronization control for coronary artery chaos system with input and state time-varying delays, PLoS One, 17 (2022). https://doi.org/10.1371/journal.pone.0266706 doi: 10.1371/journal.pone.0266706
|
| [25] |
D. W. Qian, H. Ding, S. Lee, H. Bae, Suppression of chaotic behaviors in a complex biological system by disturbance observer-based derivative-integral terminal sliding mode, J. Autom. Sin., 7 (2020), 126–135. https://doi.org/10.1109/JAS.2019.1911834 doi: 10.1109/JAS.2019.1911834
|
| [26] |
A. Ranjbar, A. Madady, M. Ramezani, A. Khosravi, Synchronization of stochastic fractional-order model of muscular blood vessels, J. Vib. Control, 30 (2024), 3775–3783. https://doi.org/10.1177/10775463231201732 doi: 10.1177/10775463231201732
|
| [27] |
J. Guo, Z. S. Zhao, J. Zhang, G. Ding, Adaptive observation control for synchronization of coronary artery time-delay systems, Mod. Phys. Lett. B, 33 (2019), 1950454. https://doi.org/10.1142/S0217984919504542 doi: 10.1142/S0217984919504542
|
| [28] |
C. H. Yang, H. Ma, K. C. Wang, Self-tuning integral-type finite-time-stabilized sliding mode control for state synchronization of coronary artery systems, Sens. Mater., 34 (2022), 3869–3881. https://doi.org/10.18494/SAM4022 doi: 10.18494/SAM4022
|
| [29] |
R. K. Wang, B. H. Li, Z. S. Zhao, J. Guo, Z. Y. Zhu, Synchronization of fuzzy control design based on Bessel-Legendre inequality for coronary artery state time-delay system, IEEE Access, 7 (2019), 181933–181941. https://doi.org/10.1109/ACCESS.2019.2957500 doi: 10.1109/ACCESS.2019.2957500
|
| [30] |
G. El Khaloufi, N. Chaibi, S. B. Alaoui, I. Boumhidi, Generalized dissipativity dynamic output feedback control for coronary artery system, Trans. Inst. Meas. Control, 46 (2024), 716–728. https://doi.org/10.1177/01423312231182 doi: 10.1177/01423312231182
|
| [31] |
Z. S. Zhao, X. M. Li, J. Zhang, Y. Z. Pei, Terminal sliding mode control with self-tuning for coronary artery system synchronization, Int. J. Biomath., 10 (2017). https://doi.org/10.1142/S1793524517500413 doi: 10.1142/S1793524517500413
|
| [32] |
H. Yang, Multiscale recurrence quantification analysis of spatial cardiac vectorcardiogram signals, IEEE Trans. Biomed. Eng., 58 (2011), 339–347. https://doi.org/10.1109/TBME.2010.2063704 doi: 10.1109/TBME.2010.2063704
|
| [33] |
Y. Chen, H. Yang, Multiscale recurrence analysis of long-term nonlinear and nonstationary time series, Chaos, Solitons & Fractals, 45 (2012), 978–987. https://doi.org/10.1016/j.chaos.2012.03.013 doi: 10.1016/j.chaos.2012.03.013
|
| [34] | Z. Y. Xu, Z. R. Liu, The chaos phenomenon of the models for two types of muscular blood vessel, J. Biomath., 1 (1986), 109–115. |
Figures(15)
Wenxin Zhang, Lijun Pei. Bifurcation and chaos in N-type and S-type muscular blood vessel models[J]. Electronic Research Archive, 2025, 33(3): 1285-1305. doi: 10.3934/era.2025057







 DownLoad:
DownLoad: