Soft actuators have garnered significant attention due to their promising applications in wearable devices, soft robotics, and other related fields. However, achieving substantial reversible deformation and high output force simultaneously remains a long-standing challenge. In this study, graphene/polydimethylsiloxane (PDMS) composite materials with high photothermal conversion efficiency and rapid photo-responsiveness were successfully developed. Inspired by the structure of biological muscles and skeletons, a novel approach involving carbon fiber bundles as reinforcement skeletons was proposed to enhance actuator performance. A composite material/carbon fiber skeleton/PDMS actuator was fabricated. With the integration of the carbon fiber skeleton, the actuator demonstrated a remarkable bending angle of 90° (3.5 times greater than that of actuators without the carbon fiber skeleton) and an output force of 0.89 mN (1.34 times higher than that of actuators without the carbon fiber skeleton) under infrared laser irradiation at 4.15 W/cm2. This advanced actuator holds great potential for applications in areas such as soft robotic grippers and artificial muscles that demand high load-bearing capacity.
Citation: Jincong Chen, Xiaodong Zhao, Haiyan Zhao. A photothermal soft actuator based on graphene/PDMS composite materials reinforced by carbon fiber skeleton[J]. AIMS Materials Science, 2025, 12(2): 301-317. doi: 10.3934/matersci.2025016
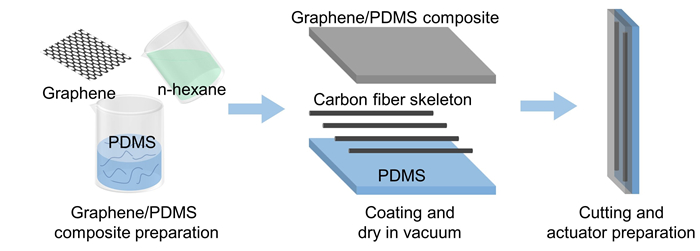
Soft actuators have garnered significant attention due to their promising applications in wearable devices, soft robotics, and other related fields. However, achieving substantial reversible deformation and high output force simultaneously remains a long-standing challenge. In this study, graphene/polydimethylsiloxane (PDMS) composite materials with high photothermal conversion efficiency and rapid photo-responsiveness were successfully developed. Inspired by the structure of biological muscles and skeletons, a novel approach involving carbon fiber bundles as reinforcement skeletons was proposed to enhance actuator performance. A composite material/carbon fiber skeleton/PDMS actuator was fabricated. With the integration of the carbon fiber skeleton, the actuator demonstrated a remarkable bending angle of 90° (3.5 times greater than that of actuators without the carbon fiber skeleton) and an output force of 0.89 mN (1.34 times higher than that of actuators without the carbon fiber skeleton) under infrared laser irradiation at 4.15 W/cm2. This advanced actuator holds great potential for applications in areas such as soft robotic grippers and artificial muscles that demand high load-bearing capacity.

| [1] |
Liu H, Chu HX, Yuan HL, et al. (2024) Bioinspired multifunctional self-sensing actuated gradient hydrogel for soft-hard robot remote interaction. Nano-Micro Lett 16: 69. https://doi.org/10.1007/s40820-023-01287-z doi: 10.1007/s40820-023-01287-z

|
| [2] |
Xu HF, Wu S, Liu Y, et al. (2024) 3D nanofabricated soft microrobots with super-compliant picoforce springs as onboard sensors and actuators. Nat Nanotechnol 19: 494–503. https://doi.org/10.1038/s41565-023-01567-0 doi: 10.1038/s41565-023-01567-0
|
| [3] |
Yang JY, Huang WT, Peng KL, et al. (2024) Versatile agar-zwitterion hybrid hydrogels for temperature self-sensing and electro-responsive actuation. Adv Funct Mater 34: 2313725. https://doi.org/10.1002/adfm.202313725 doi: 10.1002/adfm.202313725
|
| [4] |
Wang HQ, Jiang H, Li YJ, et al. (2024) Electric-thermal dual-responsive HASEL actuator for solid-liquid bi-stabilized smart switching. Adv Funct Mater 34: 2409472. https://doi.org/10.1002/adfm.202409472 doi: 10.1002/adfm.202409472
|
| [5] |
Zhu QL, Liu WX, Khoruzhenko O, et al. (2024) Closed twisted hydrogel ribbons with self-sustained motions under static light irradiation. Adv Mater 36: 2314152. https://doi.org/10.1002/adma.202314152 doi: 10.1002/adma.202314152
|
| [6] |
Skillin NP, Bauman GE, Kirkpatrick BE, et al. (2024) Photothermal actuation of thick 3D-printed liquid crystalline elastomer nanocomposites. Adv Mater 36: 2313745. https://doi.org/10.1002/adma.202313745 doi: 10.1002/adma.202313745
|
| [7] |
Gu M, Echtermeyer TJ (2024) A graphene-mica-based photo-thermal actuator for small-scale soft robots. Small 20: 2311001. https://doi.org/10.1002/smll.202311001 doi: 10.1002/smll.202311001
|
| [8] |
Tian XW, Guo YS, Zhang JQ, et al. (2024) Fiber actuators based on reversible thermal responsive liquid crystal elastomer. Small 20: 2306952. https://doi.org/10.1002/smll.202306952 doi: 10.1002/smll.202306952
|
| [9] |
Zeng SF, Ye YJ, Zhou PD, et al. (2024) Programmable and reconfigurable humidity-driven actuators made with MXene (Ti3C2Tx)-cellulose nanofiber composites for biomimetic applications. Nano Res 17: 6619–6629. https://doi.org/10.1007/s12274-024-6542-4 doi: 10.1007/s12274-024-6542-4
|
| [10] |
Weng X, Weng ZW, Qin M, et al. (2024) Bioinspired moisture-driven soft actuators based on MXene/aramid nanofiber nanocomposite films. ACS Appl Nano Mater 7: 5587–5597. https://doi.org/10.1021/acsanm.4c00420 doi: 10.1021/acsanm.4c00420
|
| [11] |
Khalid MY, Arif ZU, Tariq A, et al. (2024) 3D printing of magneto-active smart materials for advanced actuators and soft robotics applications. Eur Polym J 205: 112718. https://doi.org/10.1016/j.eurpolymj.2023.112718 doi: 10.1016/j.eurpolymj.2023.112718
|
| [12] |
Wang B, Chen YR, Ye ZC, et al. (2024) Low-friction soft robots for targeted bacterial infection treatment in gastrointestinal tract. Cyborg Bionic Syst 5: 0138. https://doi.org/10.34133/cbsystems.0138 doi: 10.34133/cbsystems.0138
|
| [13] |
Yang Y, He ZG, Jiao PC, et al. (2024) Bioinspired soft robotics: How do we learn from creatures? IEEE Rev Biomed Eng 17: 153–165. https://doi.org/10.1109/RBME.2022.3210015 doi: 10.1109/RBME.2022.3210015
|
| [14] |
Zhang W, Jin K, Ren Z, et al. (2024) High-performance MXene/carbon nanotube electrochemical actuators for biomimetic soft robotic applications. Adv Funct Mater 34: 2408496. https://doi.org/10.1002/adfm.202408496 doi: 10.1002/adfm.202408496
|
| [15] |
Nguyen V, Oh S, Mahato M, et al. (2024) Functionally antagonistic polyelectrolyte for electro-ionic soft actuator. Nat Commun 15: 435. https://doi.org/10.1038/s41467-024-44719-z doi: 10.1038/s41467-024-44719-z
|
| [16] |
Nan MM, Guo KL, Jia T, et al. (2024) Novel acid-driven bioinspired self-resettable bilayer hydrogel actuator mimicking natural muscles. ACS Appl Mater Interfaces 16: 9224–9230. https://doi.org/10.1021/acsami.3c16500 doi: 10.1021/acsami.3c16500
|
| [17] |
Zhang L, Xing SC, Yin HF, et al. (2024) Skin-inspired, sensory robots for electronic implants. Nat Commun 15: 4777. https://doi.org/10.1038/s41467-024-48903-z doi: 10.1038/s41467-024-48903-z
|
| [18] |
Kim H, Na H, Noh S, et al. (2024) Inherently integrated microfiber-based flexible proprioceptive sensor for feedback-controlled soft actuators. npj Flex Electron 8: 15. https://doi.org/10.1038/s41528-024-00302-6 doi: 10.1038/s41528-024-00302-6
|
| [19] |
Park J, Lee Y, Cho S, et al. (2024) Soft sensors and actuators for wearable human-machine interfaces. Chem Rev 124: 1464–1534. https://doi.org/10.1021/acs.chemrev.3c00356 doi: 10.1021/acs.chemrev.3c00356
|
| [20] |
Che ZY, Wan X, Xu J, et al. (2024) Speaking without vocal folds using a machine-learning-assisted wearable sensing-actuation system. Nat Commun 15: 1873. https://doi.org/10.1038/s41467-024-45915-7 doi: 10.1038/s41467-024-45915-7
|
| [21] |
Jin WY, Pei JY, Xie P, et al. (2023) Machine learning-based prediction of mechanical properties and performance of nickel-graphene nanocomposites using molecular dynamics simulation data. ACS Appl Nano Mater 6: 12190–12199. https://doi.org/10.1021/acsanm.3c01919 doi: 10.1021/acsanm.3c01919
|
| [22] |
Jiao ZD, Hu ZH, Shi YH, et al. (2024) Reprogrammable, intelligent soft origami LEGO coupling actuation, computation, and sensing. The Innovation 5: 100549. https://doi.org/10.1016/j.xinn.2023.100549 doi: 10.1016/j.xinn.2023.100549
|
| [23] |
Ma JN, Ma B, Wang ZX, et al. (2024) Multiresponsive MXene actuators with asymmetric quantum-confined superfluidic structures. Adv Funct Mater 34: 2308317. https://doi.org/10.1002/adfm.202308317 doi: 10.1002/adfm.202308317
|
| [24] |
Li XL, Han DD, Zhang YC, et al. (2025) Direct laser scribing of all-solid-state in-plane proton microsupercapacitors on ionic covalent organic framework films. Adv Funct Mater 2423854. https://doi.org/10.1002/adfm.202423854 doi: 10.1002/adfm.202423854
|
| [25] |
Tian JT, Cao WH (2024) Reconfigurable flexible metasurfaces: from fundamentals towards biomedical applications. PhotoniX 5: 2. https://doi.org/10.1186/s43074-023-00116-1 doi: 10.1186/s43074-023-00116-1
|
| [26] |
Sun ZW, Dang C, Zhang HM, et al. (2024) Lignin powered versatile bioelastomer: A universal medium for smart photothermal conversion. Adv Funct Mater 34: 2405130. https://doi.org/10.1002/adfm.202405130 doi: 10.1002/adfm.202405130
|
| [27] |
Zhan LX, Chen SH, Xin YY, et al. (2024) Dual-responsive MXene-functionalized wool yarn artificial muscles. Adv Sci 11: 2402196. https://doi.org/10.1002/advs.202402196 doi: 10.1002/advs.202402196
|
| [28] |
Guo KX, Yang XH, Zhou C, et al. (2024) Self-regulated reversal deformation and locomotion of structurally homogenous hydrogels subjected to constant light illumination. Nat Commun 15: 1694. https://doi.org/10.1038/s41467-024-46100-6 doi: 10.1038/s41467-024-46100-6
|
| [29] |
López-Díaz A, Vázquez AS, Vázquez E (2024) Hydrogels in soft robotics: Past, present, and future. ACS Nano 18: 20817–20826. https://doi.org/10.1021/acsnano.3c12200 doi: 10.1021/acsnano.3c12200
|
| [30] |
Zhou K, Sun RJ, Wojciechowski JP, et al. (2024) 4D multimaterial printing of soft actuators with spatial and temporal control. Adv Mater 36: 2312135. https://doi.org/10.1002/adma.202312135 doi: 10.1002/adma.202312135
|
| [31] |
Lu YW, Wu YM, Wu JL, et al. (2024) Electro-induced two-way shape memory thermoplastic polyamide elastomer/carbon nanotubes composites. J Mater Res Technol 29: 2062–2071. https://doi.org/10.1016/j.jmrt.2024.01.258 doi: 10.1016/j.jmrt.2024.01.258
|
| [32] |
Iravani S, Varma RS (2024) MXenes for bioinspired soft actuators: Advancements in angle-independent structural colors and beyond. Nano-Micro Lett 16: 142. https://doi.org/10.1007/s40820-024-01367-8 doi: 10.1007/s40820-024-01367-8
|
| [33] |
Yang ZQ, Wang YT, Lan LD, et al. (2024) Bioinspired H-bonding connected gradient nanostructure actuators based on cellulose nanofibrils and graphene. Small 20: 2401580. https://doi.org/10.1002/smll.202401580 doi: 10.1002/smll.202401580
|
| [34] |
Chen JC, Cao YT, Pei JY, et al. (2023) Multifunctional actuator based on graphene/PDMS composite materials with shape programmable configuration and high photothermal conversion capability. ACS Appl Mater Interfaces 15: 31917–31926. https://doi.org/10.1021/acsami.3c06041 doi: 10.1021/acsami.3c06041
|
| [35] |
Lin S, Ma SQ, Chen KZ, et al. (2024) A humidity-driven film with fast response and continuous rolling locomotion. Chem Eng J 495: 153294. https://doi.org/10.1016/j.cej.2024.153294 doi: 10.1016/j.cej.2024.153294
|
| [36] |
Yu J, Xu ZP, Wan Q, et al. (2024) Ultrafast bi-directional bending moisture-responsive soft actuators through superfine silk rod modified bio-mimicking hierarchical layered structure. Small 20: 2309364. https://doi.org/10.1002/smll.202309364 doi: 10.1002/smll.202309364
|
| [37] |
Wang J, Zhou H, Fan YY, et al. (2024) Adaptive nanotube networks enabling omnidirectionally deformable electro-driven liquid crystal elastomers towards artificial muscles. Mater Horiz 11: 1877–1888. https://doi.org/10.1039/D4MH00107A doi: 10.1039/D4MH00107A
|
| [38] |
Wei J, Ma C, Zhang TT, et al. (2024) High-performance cellulose nanofibers-based actuators with multi-stimulus responses and energy storage. Chem Eng J 490: 151393. https://doi.org/10.1016/j.cej.2024.151393 doi: 10.1016/j.cej.2024.151393
|
| [39] |
Yang MJ, Yuan ZK, Liu J, et al. (2019) Photoresponsive actuators built from carbon-based soft materials. Adv Opt Mater 7: 1900069. https://doi.org/10.1002/adom.201900069 doi: 10.1002/adom.201900069
|
| [40] |
Wang M, Zhou L, Deng WY, et al. (2022) Ultrafast response and programmable locomotion of liquid/vapor/light-driven soft multifunctional actuators. ACS Nano 16: 2672–2681. https://doi.org/10.1021/acsnano.1c09477 doi: 10.1021/acsnano.1c09477
|
| [41] |
Chathuranga H, Marriam I, Chen S, et al. (2022) Multistimulus-responsive graphene oxide/Fe3O4/starch soft actuators. ACS Appl Mater Interfaces 14: 16772–16779. https://doi.org/10.1021/acsami.2c03486 doi: 10.1021/acsami.2c03486
|
| [42] |
Sales FCP, Ariati RM, Noronha VT, et al. (2022) Mechanical characterization of PDMS with different mixing ratios. Proc Struct Integr 37: 383–388. https://doi.org/10.1016/j.prostr.2022.01.099 doi: 10.1016/j.prostr.2022.01.099
|
| [43] |
Kinloch IA, Suhr J, Lou J, et al. (2018) Composites with carbon nanotubes and graphene: An outlook. Science 362: 547–553. https://doi.org/10.1126/science.aat7439 doi: 10.1126/science.aat7439
|
| [44] |
Tang ZH, Gao ZW, Jia SH, et al. (2017) Graphene-based polymer bilayers with superior light-driven properties for remote construction of 3D structures. Adv Sci 4: 1600437. https://doi.org/10.1002/advs.201600437 doi: 10.1002/advs.201600437
|
| [45] |
Li B, Dong S, Wu X, et al. (2017) Anisotropic thermal property of magnetically oriented carbon nanotube/graphene polymer composites. Compos Sci Technol 147: 52–61. https://doi.org/10.1016/j.compscitech.2017.05.006 doi: 10.1016/j.compscitech.2017.05.006
|
 matersci-12-02-016-Supplementary.pdf matersci-12-02-016-Supplementary.pdf |
 |





Figures(6)

Jincong Chen, Xiaodong Zhao, Haiyan Zhao. A photothermal soft actuator based on graphene/PDMS composite materials reinforced by carbon fiber skeleton[J]. AIMS Materials Science, 2025, 12(2): 301-317. doi: 10.3934/matersci.2025016







 DownLoad:
DownLoad: