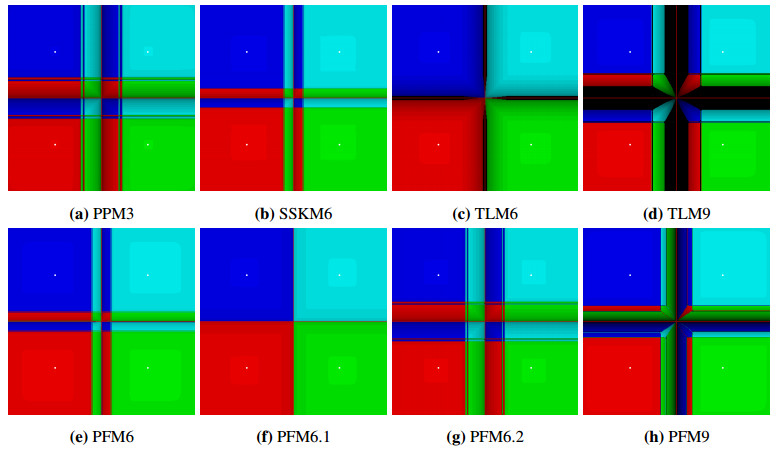
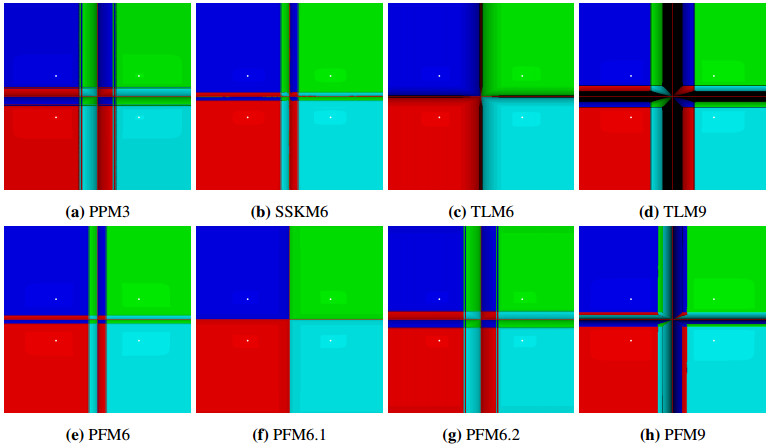
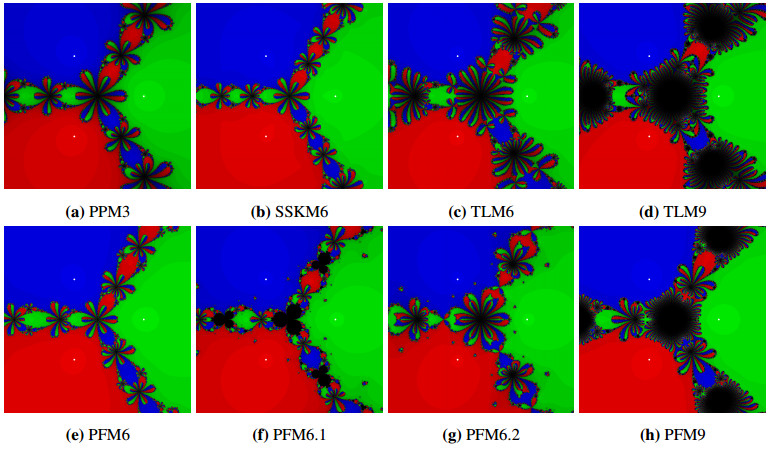
In this paper, we have constructed a family of three-step methods with sixth-order convergence and a novel approach to enhance the convergence order $ p $ of iterative methods for systems of nonlinear equations. Additionally, we propose a three-step scheme with convergence order $ p+3 $ (for $ p\geq3 $) and have extended it to a generalized $ (m+2) $-step scheme by merely incorporating one additional function evaluation, thus achieving convergence orders up to $ p+3m $, $ m\in\mathbb{N} $. We also provide a thorough local convergence analysis in Banach spaces, including the convergence radius and uniqueness results, under the assumption of a Lipschitz-continuous Fréchet derivative. Theoretical findings have been validated through numerical experiments. Lastly, the performance of these methods is showcased through the analysis of their basins of attraction and their application to systems of nonlinear equations.
Citation: G Thangkhenpau, Sunil Panday, Bhavna Panday, Carmen E. Stoenoiu, Lorentz Jäntschi. Generalized high-order iterative methods for solutions of nonlinear systems and their applications[J]. AIMS Mathematics, 2024, 9(3): 6161-6182. doi: 10.3934/math.2024301
In this paper, we have constructed a family of three-step methods with sixth-order convergence and a novel approach to enhance the convergence order $ p $ of iterative methods for systems of nonlinear equations. Additionally, we propose a three-step scheme with convergence order $ p+3 $ (for $ p\geq3 $) and have extended it to a generalized $ (m+2) $-step scheme by merely incorporating one additional function evaluation, thus achieving convergence orders up to $ p+3m $, $ m\in\mathbb{N} $. We also provide a thorough local convergence analysis in Banach spaces, including the convergence radius and uniqueness results, under the assumption of a Lipschitz-continuous Fréchet derivative. Theoretical findings have been validated through numerical experiments. Lastly, the performance of these methods is showcased through the analysis of their basins of attraction and their application to systems of nonlinear equations.

| [1] | J. Ortega, W. Rheinboldt, Iterative solution of nonlinear equations in several variables, Philadelphia: Society for Industrial and Applied Mathematics, 2000. http://dx.doi.org/10.1137/1.9780898719468 |
| [2] |
O. Ogbereyivwe, K. Muka, Multistep quadrature based methods for nonlinear system of equations with singular jacobian, Journal of Applied Mathematics and Physics, 7 (2019), 702–725. http://dx.doi.org/10.4236/jamp.2019.73049 doi: 10.4236/jamp.2019.73049

|
| [3] |
H. Abro, M. Shaikh, A new family of twentieth order convergent methods with applications to nonlinear systems in engineering, Mehran Univ. Res. J. Eng., 42 (2023), 165–176. http://dx.doi.org/10.22581/muet1982.2301.15 doi: 10.22581/muet1982.2301.15
|
| [4] |
R. Behl, P. Maroju, S. Motsa, Efficient family of sixth-order methods for nonlinear models with its dynamics, Int. J. Comp. Meth., 16 (2019), 1840008. http://dx.doi.org/10.1142/S021987621840008X doi: 10.1142/S021987621840008X
|
| [5] |
G. Thangkhenpau, S. Panday, L. Bolunduţ, L. Jäntschi, Efficient families of multi-point iterative methods and their self-acceleration with memory for solving nonlinear equations, Symmetry, 15 (2023), 1546. http://dx.doi.org/10.3390/sym15081546 doi: 10.3390/sym15081546
|
| [6] |
I. Argyros, D. Sharma, C. Argyros, S. Parhi, S. Sunanda, Extended iterative schemes based on decomposition for nonlinear models, J. Appl. Math. Comput., 68 (2022), 1485–1504. http://dx.doi.org/10.1007/s12190-021-01570-5 doi: 10.1007/s12190-021-01570-5
|
| [7] |
H. Wang, S. Li, A family of derivative-free methods for nonlinear equations, Rev. Mat. Complut., 24 (2011), 375–389. http://dx.doi.org/10.1007/s13163-010-0044-5 doi: 10.1007/s13163-010-0044-5
|
| [8] | G. Thangkhenpau, S. Panday, Efficient families of multipoint iterative methods for solving nonlinear equations, Eng. Let., 31 (2023), 574–583. |
| [9] |
S. Kumar, J. Bhagwan, L. Jäntschi, Optimal derivative-free one-point algorithms for computing multiple zeros of nonlinear equations, Symmetry, 14 (2022), 1881. http://dx.doi.org/10.3390/sym14091881 doi: 10.3390/sym14091881
|
| [10] |
A. Singh, J. Jaiswal, Several new third-order and fourth-order iterative methods for solving nonlinear equations, Int. J. Eng. Math., 2014 (2014), 828409. http://dx.doi.org/10.1155/2014/828409 doi: 10.1155/2014/828409
|
| [11] |
G. Thangkhenpau, S. Panday, S. Mittal, L. Jäntschi, Novel parametric families of with and without memory iterative methods for multiple roots of nonlinear equations, Mathematics, 11 (2023), 2036. http://dx.doi.org/10.3390/math11092036 doi: 10.3390/math11092036
|
| [12] |
M. Dehghan, A. Shirilord, Three-step iterative methods for numerical solution of systems of nonlinear equations, Eng. Comput., 38 (2022), 1015–1028. http://dx.doi.org/10.1007/s00366-020-01072-1 doi: 10.1007/s00366-020-01072-1
|
| [13] | F. Potra, V. Pták, Nondiscrete induction and iterative processes, London: Pitman Advanced Pub. Program, 1984. |
| [14] |
S. Arora, S. Singh, Butterfly optimization algorithm: a novel approach for global optimization, Soft Comput., 23 (2019), 715–734. http://dx.doi.org/10.1007/s00500-018-3102-4 doi: 10.1007/s00500-018-3102-4
|
| [15] | H. Shehadeh, I. Ahmedy, M. Idris, Empirical study of sperm swarm optimization algorithm, In: Intelligent systems and applications, Cham: Springer, 2018, 1082–1104. http://dx.doi.org/10.1007/978-3-030-01057-7_80 |
| [16] |
R. Sihwail, O. Said Solaiman, K. Zainol Ariffin, New robust hybrid jarratt-butterfly optimization algorithm for nonlinear models, J. King Saud Univ.-Com., 34 (2022), 8207–8220. http://dx.doi.org/10.1016/j.jksuci.2022.08.004 doi: 10.1016/j.jksuci.2022.08.004
|
| [17] |
O. Said Solaiman, R. Sihwail, H. Shehadeh, I. Hashim, K. Alieyan, Hybrid newton–sperm swarm optimization algorithm for nonlinear systems, Mathematics, 11 (2023), 1473. http://dx.doi.org/10.3390/math11061473 doi: 10.3390/math11061473
|
| [18] |
X. Xiao, H. Yin, Accelerating the convergence speed of iterative methods for solving nonlinear systems, Appl. Math. Comput., 333 (2018), 8–19. http://dx.doi.org/10.1016/j.amc.2018.03.108 doi: 10.1016/j.amc.2018.03.108
|
| [19] |
R. Sharma, J. Sharma, N. Kalra, A modified newton–Özban composition for solving nonlinear systems, Int. J. Comp. Meth., 17 (2020), 1950047. http://dx.doi.org/10.1142/S0219876219500476 doi: 10.1142/S0219876219500476
|
| [20] |
Z. Liu, Q. Zheng, C. Huang, Third- and fifth-order newton–gauss methods for solving nonlinear equations with n variables, Appl. Math. Comput., 290 (2016), 250–257. http://dx.doi.org/10.1016/j.amc.2016.06.010 doi: 10.1016/j.amc.2016.06.010
|
| [21] |
J. Sharma, P. Gupta, On some efficient techniques for solving systems of nonlinear equations, Advances in Numerical Analysis, 2013 (2013), 252798. http://dx.doi.org/10.1155/2013/252798 doi: 10.1155/2013/252798
|
| [22] | I. Argyros, D. Sharma, C. Argyros, Extended efficient high convergence order schemes for equations, Applicationes Mathematicae, in press. http://dx.doi.org/10.4064/am2444-2-2023 |
| [23] |
B. Panday, J. Jaiswal, On the local convergence of modified homeier-like method in banach spaces, Numer. Analys. Appl., 11 (2018), 332–345. http://dx.doi.org/10.1134/S1995423918040067 doi: 10.1134/S1995423918040067
|
| [24] |
I. Argyros, S. George, Ball analysis for an efficient sixth convergence order scheme under weaker conditions, Advances in the Theory of Nonlinear Analysis, 5 (2021), 445–453. http://dx.doi.org/10.31197/atnaa.746959 doi: 10.31197/atnaa.746959
|
| [25] |
T. Lotfi, P. Bakhtiari, A. Cordero, K. Mahdiani, J. Torregrosa, Some new efficient multipoint iterative methods for solving nonlinear systems of equations, Int. J. Comput. Math., 92 (2015), 1921–1934. http://dx.doi.org/10.1080/00207160.2014.946412 doi: 10.1080/00207160.2014.946412
|
| [26] |
A. Cordero, J. Torregrosa, Variants of newton's method using fifth-order quadrature formulas, Appl. Math. Comput., 190 (2007), 686–698. http://dx.doi.org/10.1016/j.amc.2007.01.062 doi: 10.1016/j.amc.2007.01.062
|
Figures(3) / Tables(4)

G Thangkhenpau, Sunil Panday, Bhavna Panday, Carmen E. Stoenoiu, Lorentz Jäntschi. Generalized high-order iterative methods for solutions of nonlinear systems and their applications[J]. AIMS Mathematics, 2024, 9(3): 6161-6182. doi: 10.3934/math.2024301







 DownLoad:
DownLoad: