Newton's method is a popular numeric approach due to its simplicity and quadratic convergence to solve nonlinear equations that cannot be solved with exact solutions. However, the initial point chosen to activate the iteration of Newton's method may cause difficulties in slower convergence, stagnation, and divergence of the iterative process. The common advice to deal with these special cases was to choose another inner point to repeat the process again or use a graph of the nonlinear equation (function) to choose a new initial point. Based on the recent experiences in teaching preservice secondary-school mathematics teachers, this classroom note presents a simple and practical strategy to avoid many of the difficulties encountered in using Newton's method during solving nonlinear equations. Instead of plotting the graph of an equation to help choose the initial point, the practical strategy is to use the middle point of the range as the initial point to start the iterative process of Newton's method. By solving ten different nonlinear equations using Newton's method initiated from the endpoints and the middle point respectively, the results show that choosing the middle point of a defined range to initiate the iterative process for Newton's method seems a general and practical strategy to avoid the difficulties encountered in using the method to solve nonlinear equations with faster convergence in most cases.
Citation: William Guo. A practical strategy to improve performance of Newton's method in solving nonlinear equations[J]. STEM Education, 2022, 2(4): 345-358. doi: 10.3934/steme.2022021
Newton's method is a popular numeric approach due to its simplicity and quadratic convergence to solve nonlinear equations that cannot be solved with exact solutions. However, the initial point chosen to activate the iteration of Newton's method may cause difficulties in slower convergence, stagnation, and divergence of the iterative process. The common advice to deal with these special cases was to choose another inner point to repeat the process again or use a graph of the nonlinear equation (function) to choose a new initial point. Based on the recent experiences in teaching preservice secondary-school mathematics teachers, this classroom note presents a simple and practical strategy to avoid many of the difficulties encountered in using Newton's method during solving nonlinear equations. Instead of plotting the graph of an equation to help choose the initial point, the practical strategy is to use the middle point of the range as the initial point to start the iterative process of Newton's method. By solving ten different nonlinear equations using Newton's method initiated from the endpoints and the middle point respectively, the results show that choosing the middle point of a defined range to initiate the iterative process for Newton's method seems a general and practical strategy to avoid the difficulties encountered in using the method to solve nonlinear equations with faster convergence in most cases.

| [1] |
Stewart, J., Calculus: Concepts and Contexts, 4th ed. 2019. Boston, USA: Cengage. |
| [2] |
Trim, D., Calculus for Engineers. 4th ed. 2008, Toronto, Canada: Pearson. |
| [3] |
Gillett, P., Calculus and Analytic Geometry. 1981, Toronto, Canada: D.C. Heath and Company. |
| [4] |
Croft, A., Davison, R., Hargreaves, M. and Flint J., Engineering Mathematics, 5th ed. 2017, Harlow, UK: Pearson. |
| [5] |
Haeussler, E.F., Paul, R.S. and Wood, R.J., Introductory Mathematical Analysis for Business, Economics and Life and Social Sciences, 13th ed. 2011. Boston, USA: Pearson. |
| [6] |
Guo, W.W., Essentials and Examples of Applied Mathematics, 2nd ed. 2020, Melbourne, Australia: Pearson. |
| [7] |
Wheatley, G., Applied Numerical Analysis, 7th ed. 2004, Boston, USA: Pearson. |
| [8] |
Chapra, S.C., Applied Numerical Methods with MATLAB for Engineers and Scientists. 2005, Boston, USA: McGraw-Hill Higher Education. |
| [9] |
Sauer, T., Numerical Analysis, 2nd ed. 2014, Harlow, UK: Pearson. |
| [10] |
Ypma, T.J., Historical development of the Newton–Raphson method. SIAM Review, 1995, 37(4): 531–551. https://doi.org/10.1137/1037125 doi: 10.1137/1037125
|




Figures(5) / Tables(1)
William Guo. A practical strategy to improve performance of Newton's method in solving nonlinear equations[J]. STEM Education, 2022, 2(4): 345-358. doi: 10.3934/steme.2022021

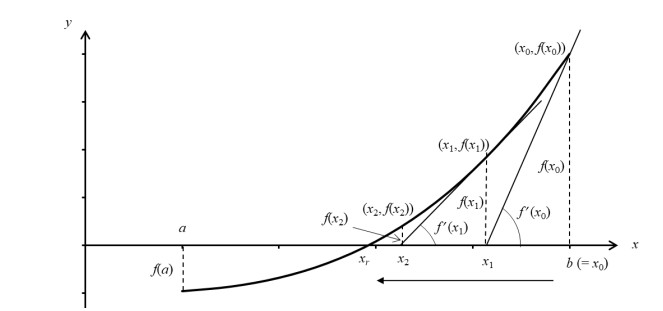
Process of approaching the root x = xr for equation f(x) = 0 by Newton's method
The root crossing the x-axis for equation f(x) = 0 in Example 1
Two roots crossing the x-axis for equation f(x) = 0 in Example 2
The graph of the function in range [0.5, 1] in Example 4 (red) and the tangent line crossing the right endpoint (1, 0.1585) in blue and that crossing point (0.5, –0.2294) in green
The graph of the function in range [0, 1.5] in Example 5 (red) and the tangent line crossing the right endpoint (1.5 0.5975) in blue and that crossing point (1, 0.3415) in green






 DownLoad:
DownLoad: