Citation: Taizo Aoyama, Takeshi Sonoda, Hideki Takebayashi. Influence of dirt and coating deterioration on the aging of solar reflectance of high-reflectance paint[J]. AIMS Materials Science, 2019, 6(6): 997-1009. doi: 10.3934/matersci.2019.6.997

| [1] |
Akbari H, Konopacki S, Pomerantz M (1999) Cooling energy saving potential of reflective roofs for residential and commercial buildings in the United States. Energy 24: 391-407. doi: 10.1016/S0360-5442(98)00105-4

|
| [2] |
Akbari H, Konopacki S (2005) Calculating energy-saving potentials of heat-island reduction strategies. Energ Policy 33: 721-756. doi: 10.1016/j.enpol.2003.10.001
|
| [3] | Akbari H, Menon S, Rosenfeld A (2009) Global cooling: increasing world-wide urban albedos to offset CO2. Clim Change 94: 275-286. |
| [4] |
Synnefa A, Saliari M, Santamouris M (2012) Experimental and numerical assessment of the impact of increased roof reflectance on a school building in Athens. Energ Buildings 55: 7-15. doi: 10.1016/j.enbuild.2012.01.044
|
| [5] |
Romeo C, Zinzi M (2013) Impact of a cool roof application on the energy and comfort performance in an existing non-residential building. A Sicilian case study. Energ Buildings 67: 647-657. doi: 10.1016/j.enbuild.2011.07.023
|
| [6] | Takebayashi H, Yamada C (2015) Field observation of cooling energy savings due to high-reflectance paints. Build 5: 310-317. |
| [7] | Hernández-Pérez I, Álvarez G, Xamán J, et al. (2014) Thermal performance of reflective materials applied to exterior buildings components-A review. Energ Buildings 80: 81-105. |
| [8] |
Hernández-Pérez I, Xamán J, Macías-Melo EV, et al. (2018) Experimental thermal evaluation of building roofs with conventional and reflective coatings. Energ Buildings 158: 569-579. doi: 10.1016/j.enbuild.2017.09.085
|
| [9] | Hernández-Pérez I, Zavala-Guillén I, Xamán J, et al. (2019) Test box experiment to assess the impact of waterproofing materials on the energy gain of building roofs in Mexico. Energy 186: 115847. |
| [10] | Itoh D, Takeda H, Fujimoto T, et al. (2011) Study on change of performance by outdoor exposure of reflective paints. AIJ J Technol Des 35: 217-220. |
| [11] | Tanabe J, Takebayashi H, Sonoda T, et al. (2015) Study on aging of solar reflectance on high reflectance paint by exposure experiment. AIJ Summaries of technical papers of annual meeting D-1, Kanagawa, Japan: 723-724. |
| [12] | Takebayashi H, Miki K, Sakai K, et al. (2016) Experimental examination of solar reflectance of high-reflectance paint in Japan with natural and accelerated aging. Energ Buildings 114: 173-179. |
| [13] | Berdahl P, Akbari H, Levinson R, et al. (2008) Weathering of roofing material-An overview. Constr Build Mater 22: 423-433. |
| [14] |
Sleiman M, Ban-Weiss G, Gilbert HE, et al. (2011) Soiling of building envelope surfaces and its effect on solar reflectance-Part I: Analysis of roofing product databases. Sol Energ Mat Sol C 95: 3385-3399. doi: 10.1016/j.solmat.2011.08.002
|
| [15] | Sleiman M, Kirchstetter TW, Berdahl P, et al. (2014) Soiling of building envelope surfaces and its effect on solar reflectance-Part Ⅱ: Development of an accelerated aging method for roofing materials. Sol Energ Mater Sol Cells 122: 271-281. |
| [16] | Akbari H, Berhe AA, Levinson R (2005) Aging and weathering of cool roofing membranes. California: Lawrence Berkeley National Laboratory, 1-14. |
| [17] | Mastrapostoli E, Santamouris M, Kolokotsa D, et al. (2014) A numerical and experimental analysis of the aging of the cool roofs for buildings in Greece. Summaries of Technical Papers of 3rd International Conference on Countermeasures to UHI, Venice, Italy: 71-80. |
| [18] | Ferrari C, Touchaei AG, Sleiman M, et al. (2013) Effect of ageing processes on solar reflectivity of clay roof tiles. Proceedings of 34th AIVC Conference, Athens, Greece: 77-79. |
| [19] | Synnefa A, Pantazaras A, Santamouris M, et al. (2013) Interlaboratory comparison of cool roofing material measurement methods. Summaries of Technical Papers of 34th AIVC Conference, Athens, Greece: 52-54. |
| [20] | Paolini R, Sleiman M, Terraneo G, et al. (2014) Solar spectral reflectance of building envelope materials after natural exposure in Rome and Milano, and after accelerated aging. Summaries of Technical Papers of 3rd International Conference on Countermeasures to UHI, Venice, Italy: 498-509. |
| [21] | Takebayashi H, Miki K, Sakai K, et al. (2014) Examination on aging experiment and accelerated aging test method of solar reflectance of the high reflectance paint in Japan. Summaries of Technical Papers of 3rd International Conference on Countermeasures to UHI, Venice, Italy: 630-641. |
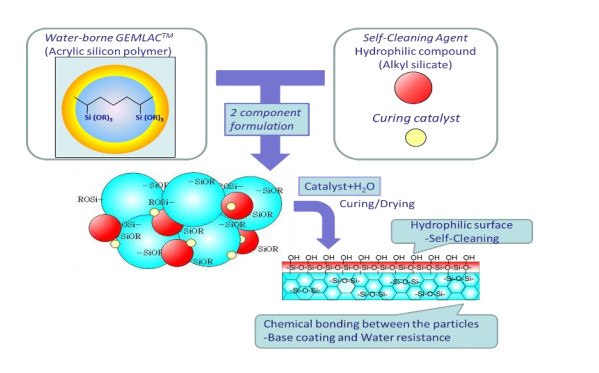
| [22] | Sonoda T, Nakanishi Y, Hamamura T, et al. (2013) Development of self-cleaning top-coat for cool roof. Summaries of Technical Papers of 34th AIVC Conference: 268-270. |
| [23] | Fukaumi H, Hamamura T, Sonoda T (2015) Coating composition and coating film obtained from coating composition. European Patent Application, EP2821450A1. |
| [24] |
Aoyama T, Sonoda T, Nakanishi Y, et al. (2017) Study on aging of solar reflectance of the self-cleaning high reflectance coating. Energ Buildings 157: 92-100. doi: 10.1016/j.enbuild.2017.02.021
|
| [25] | Akbari H (2014) Advance in developing standards for accelerated aging of cool roofing materials. Summaries of Technical Papers of Roof Coating Manufacturers Association International Roof Coatings Conference. |
| [26] | Kakuta M (2004) Technology trends of anti-soiling and anti-bacterium. Tokyo: CMC Publishing. |
| [27] | Aoyama T, Sonoda T, Takebayashi H (2017) Study on the influence of dirt and coating deterioration on aging of solar reflectance on high reflectance paint. AIJ Summaries of technical papers of annual meeting, Hiroshima, Japan, 395-396 |
| [28] | Tamura M, Motohashi K, Shimizu R, et al. (2012) Study on performance of high reflectance paint for building Part7, Solar reflection after weathering test. Japan Society For Finishing Technology, Summaries of technical papers of annual meeting, Tokyo, Japan, 16-19. |
| [29] | Takebayashi H, Moriyama M (2012) Study on the estimation of solar reflectance reduction on cool coated corrugated roof. AIJ J Technol Des 18: 623-626. |
| [30] | JSTM J 6151 (2014) Method of measuring the solar reflectance of a flat roof in the field. |
| [31] | Murata Y, Sakai K, Miki K, et al. (2012) A study on the effect due to the reduction of absorbed solar radiation by cool painting, Part 1: improvement in estimated accuracy of field solar reflectivity measurement. Journal of JSES 38: 59-66. |
| [32] | Takebayashi H, Tanabe J, Aoyama T, et al. (2017) Using field measurements to assess aging of self-cleaning high-reflectance paint. Int J Thermophys 38: 119. |
| [33] | Tsuruta T (1990) Applied Optics Ⅰ. Tokyo: Baifukan, 139-144. |
Figures(7) / Tables(1)

Taizo Aoyama, Takeshi Sonoda, Hideki Takebayashi. Influence of dirt and coating deterioration on the aging of solar reflectance of high-reflectance paint[J]. AIMS Materials Science, 2019, 6(6): 997-1009. doi: 10.3934/matersci.2019.6.997







 DownLoad:
DownLoad: