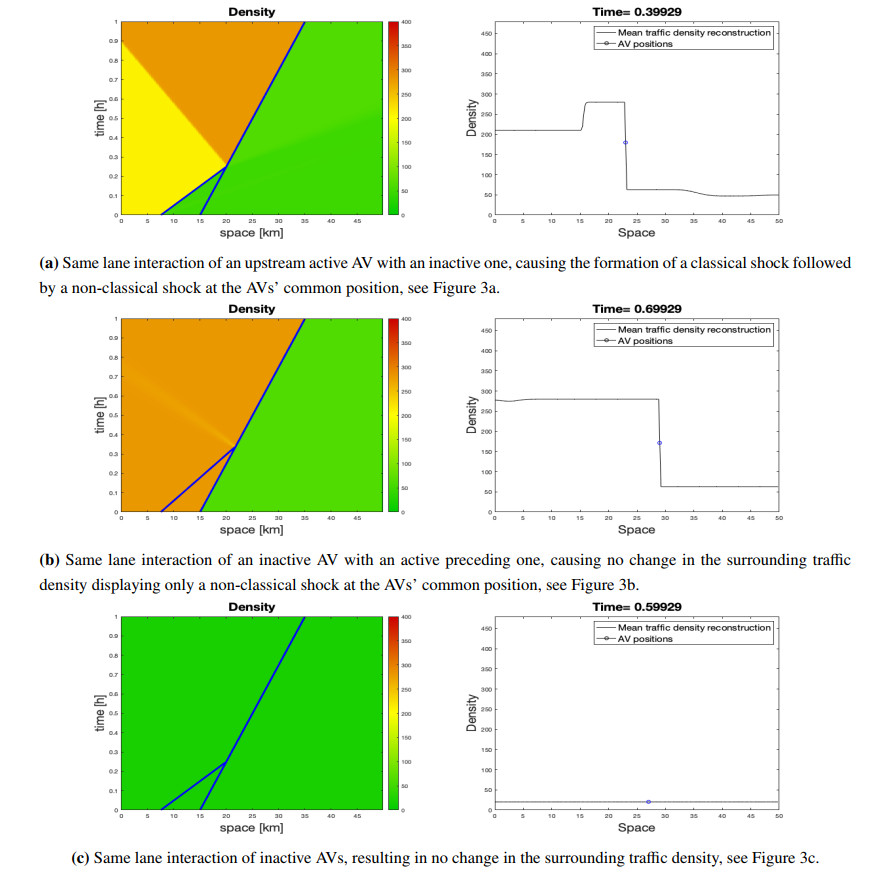
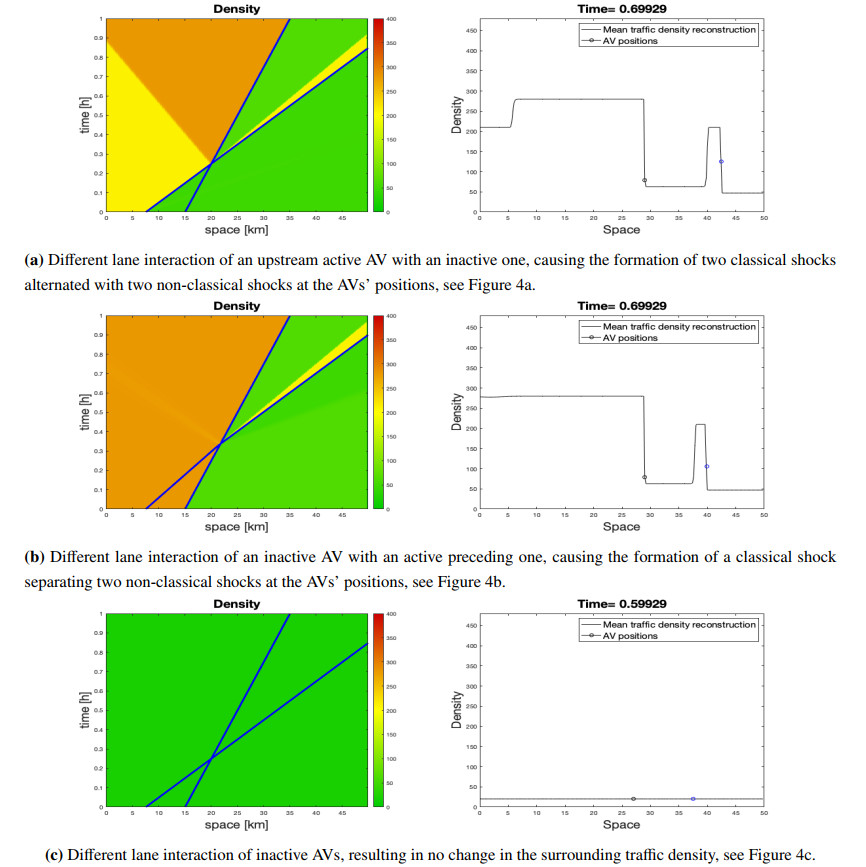
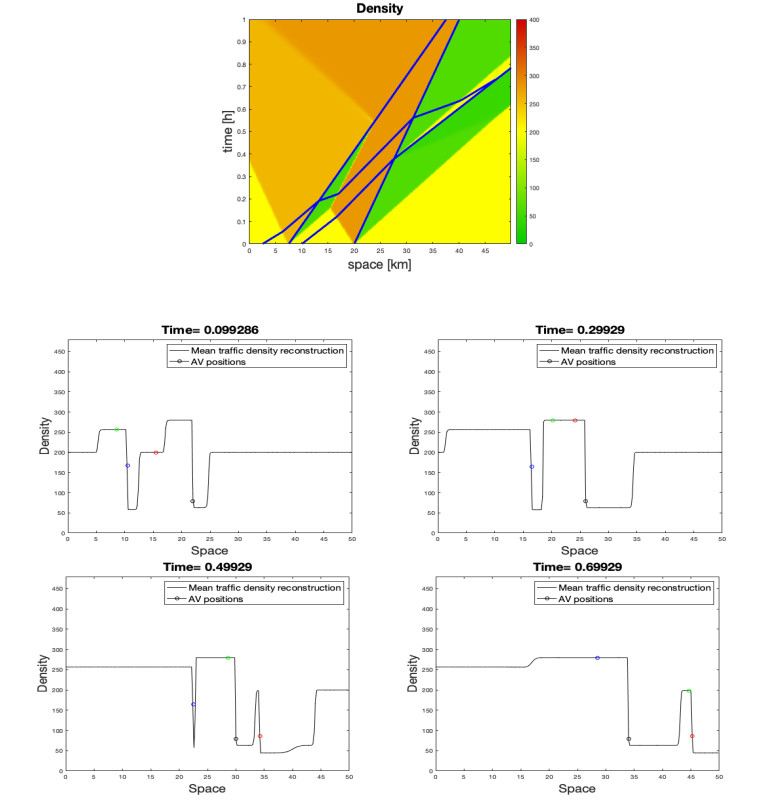
We present a general multi-scale approach for modeling the interaction of controlled autonomous vehicles (AVs) with the surrounding traffic flow. The model consists of a scalar conservation law for the bulk traffic, coupled with ordinary differential equations describing the possibly interacting AV trajectories. The coupling is realized through flux constraints at the moving bottleneck positions, inducing the formation of non-classical jump discontinuities in the traffic density. In turn, AVs are forced to adapt their speed to the downstream traffic average velocity in congested situations. We analyze the model solutions in a Riemann-type setting, and propose an adapted finite volume scheme to compute approximate solutions for general initial data. The work paves the way to the study of general optimal control strategies for AV velocities, aiming at improving the overall traffic flow by reducing congestion phenomena and the associated externalities.
Citation: Paola Goatin, Chiara Daini, Maria Laura Delle Monache, Antonella Ferrara. Interacting moving bottlenecks in traffic flow[J]. Networks and Heterogeneous Media, 2023, 18(2): 930-945. doi: 10.3934/nhm.2023040
We present a general multi-scale approach for modeling the interaction of controlled autonomous vehicles (AVs) with the surrounding traffic flow. The model consists of a scalar conservation law for the bulk traffic, coupled with ordinary differential equations describing the possibly interacting AV trajectories. The coupling is realized through flux constraints at the moving bottleneck positions, inducing the formation of non-classical jump discontinuities in the traffic density. In turn, AVs are forced to adapt their speed to the downstream traffic average velocity in congested situations. We analyze the model solutions in a Riemann-type setting, and propose an adapted finite volume scheme to compute approximate solutions for general initial data. The work paves the way to the study of general optimal control strategies for AV velocities, aiming at improving the overall traffic flow by reducing congestion phenomena and the associated externalities.

| [1] | R. Borsche, R. M. Colombo, M. Garavello, Mixed systems: ODEs–balance laws, J. Differ Equ, 252 (2012), 2311–2338. |
| [2] | G. Bretti, E. Cristiani, C. Lattanzio, A. Maurizi, B. Piccoli, Two algorithms for a fully coupled and consistently macroscopic PDE-ODE system modeling a moving bottleneck on a road, Math. Eng., 1 (2019), 55–83. |
| [3] |
C. Chalons, M. L. Delle Monache, P. Goatin, A conservative scheme for non-classical solutions to a strongly coupled PDE-ODE problem, Interfaces Free Bound, 19 (2017), 553–570. https://doi.org/10.4171/IFB/392 doi: 10.4171/IFB/392

|
| [4] | M. Cičić, L. Jin, K. H. Johansson, Coordinating vehicle platoons for highway bottleneck decongestion and throughput improvement, IEEE Trans. Intell. Transp. Syst., 37 (2020), 8959–8971. |
| [5] | M. Cičić, K. H. Johansson, Traffic regulation via individually controlled automated vehicles: a cell transmission model approach, 2018 21st International Conference on Intelligent Transportation Systems (ITSC), (2018), 766–771. |
| [6] | M. Cičić, K. H. Johansson, Energy-optimal platoon catch-up in moving bottleneck framework, 2019 18th European Control Conference (ECC), (2019), 3674–3679. |
| [7] | M. Cičić, K. H. Johansson, Stop-and-go wave dissipation using accumulated controlled moving bottlenecks in multi-class CTM framework, 2019 IEEE 58th Conference on Decision and Control (CDC), (2019), 3146–3151. |
| [8] |
M. Cičić, I. Mikolášek, K. H. Johansson, Front tracking transition system model with controlled moving bottlenecks and probabilistic traffic breakdowns, IFAC-PapersOnLine, 53 (2020), 14990–14996. https://doi.org/10.1016/j.ifacol.2020.12.1997 doi: 10.1016/j.ifacol.2020.12.1997
|
| [9] | C. G. Claudel, A. M. Bayen, Lax–hopf based incorporation of internal boundary conditions into hamilton-jacobi equation. Part II: Computational methods, IEEE Trans. Automat. Contr., 55 (2010), 1158–1174. |
| [10] |
R. Courant, K. Friedrichs, H. Lewy, On the partial difference equations of mathematical physics, IBM J. Res. Develop., 11 (1967), 215–234. https://doi.org/10.1147/rd.112.0215 doi: 10.1147/rd.112.0215
|
| [11] |
C. F. Daganzo, J. A. Laval, On the numerical treatment of moving bottlenecks, TRANSPORT RES B-METH, 39 (2005), 31–46. https://doi.org/10.1016/j.ceramint.2004.03.032 doi: 10.1016/j.ceramint.2004.03.032
|
| [12] | C. Daini, P. Goatin, M. L. Delle Monache, A. Ferrara, Centralized Traffic Control via Small Fleets of Connected and Automated Vehicles, ECC 2022–European Control Conference, (2022), 371–376. |
| [13] |
L. Davis, Effect of adaptive cruise control systems on traffic flow, Phys. Rev. E, 69 (2004), 066110. https://doi.org/10.1103/PhysRevE.69.066110 doi: 10.1103/PhysRevE.69.066110
|
| [14] | M. L. Delle Monache, P. Goatin, A front tracking method for a strongly coupled PDE-ODE system with moving density constraints in traffic flow, Discrete Contin. Dyn. Syst. Ser. S, 7 (2014), 435–447. |
| [15] |
M. L. Delle Monache, P. Goatin, Scalar conservation laws with moving constraints arising in traffic flow modeling: an existence result, J. Differ. Equ., 257 (2014), 4015–4029. https://doi.org/10.1016/j.jde.2014.07.014 doi: 10.1016/j.jde.2014.07.014
|
| [16] | M. L. Delle Monache, P. Goatin, A numerical scheme for moving bottlenecks in traffic flow. Bull. Braz. Math. Soc. (N.S.), 47 (2016), 605–617. https://doi.org/10.1007/s00574-016-0172-8 |
| [17] | M. L. Delle Monache, P. Goatin, Stability estimates for scalar conservation laws with moving flux constraints, Netw. Heterog. Media, 12 (2017), 245–258. |
| [18] | M. L. Delle Monache, T. Liard, A. Rat, R. Stern, R. Bhadani, B. Seibold, et al., Feedback Control Algorithms for the Dissipation of Traffic Waves with Autonomous Vehicles, Cham: Springer International Publishing, 2019,275–299. |
| [19] | A. Ferrara, S. Sacone, S. Siri, Freeway traffic modelling and control, Advances in Industrial Control. Springer, Cham, 2018. |
| [20] |
M. Garavello, P. Goatin, T. Liard, B. Piccoli, A multiscale model for traffic regulation via autonomous vehicles, J. Differ Equ, 269 (2020), 6088–6124. https://doi.org/10.1016/j.jde.2020.04.031 doi: 10.1016/j.jde.2020.04.031
|
| [21] |
I. Gasser, C. Lattanzio, A. Maurizi, Vehicular traffic flow dynamics on a bus route, Multiscale Model. Simul., 11 (2013), 925–942. https://doi.org/10.1137/130906350 doi: 10.1137/130906350
|
| [22] | S. K. Godunov, A difference method for numerical calculation of discontinuous solutions of the equations of hydrodynamics, Mat. Sb. (N.S.), 47 (1959), 271–306. |
| [23] | B. Greenshields, J. Bibbins, W. Channing, H. Miller, A study of traffic capacity, Highway research board proceedings, 14 (1935), 448–477. https://doi.org/10.1007/BF01778673 |
| [24] |
M. Guériau, R. Billot, N. E. El Faouzi, J. Monteil, F. Armetta, S. Hassas, How to assess the benefits of connected vehicles? A simulation framework for the design of cooperative traffic management strategies, Transp Res Part C Emerg Technol, 67 (2016), 266–279. https://doi.org/10.1016/j.trc.2016.01.020 doi: 10.1016/j.trc.2016.01.020
|
| [25] | K. Jang, E. Vinitsky, B. Chalaki, B. Remer, L. Beaver, A. A. Malikopoulos, et al., Simulation to scaled city: Zero-shot policy transfer for traffic control via autonomous vehicles, Proceedings of the 10th ACM/IEEE International Conference on Cyber-Physical Systems, (2019), 291–300. |
| [26] |
F. Knorr, D. Baselt, M. Schreckenberg, M. Mauve, Reducing traffic jams via VANETs, IEEE Trans. Veh. Technol., 61 (2012), 3490–3498. https://doi.org/10.1109/TVT.2012.2209690 doi: 10.1109/TVT.2012.2209690
|
| [27] |
C. Lattanzio, A. Maurizi, B. Piccoli, Moving bottlenecks in car traffic flow: a PDE-ODE coupled model, SIAM J. Math. Anal., 43 (2011), 50–67. https://doi.org/10.1137/090767224 doi: 10.1137/090767224
|
| [28] |
J. Lebacque, J. Lesort, F. Giorgi, Introducing buses into first-order macroscopic traffic flow models, Transp Res Rec, 1644 (1998), 70–79. https://doi.org/10.3141/1644-08 doi: 10.3141/1644-08
|
| [29] | J. P. Lebacque, The Godunov scheme and what it means for first order traffic flow models, Transportation and traffic theory. Proceedings of the 13th international symposium on transportation and traffic theory, (1996), 24–26. |
| [30] |
L. Leclercq, S. Chanut, J. B. Lesort, Moving bottlenecks in Lighthill-Whitham-Richards model: A unified theory, Transp Res Rec, 1883 (2004), 3–13. https://doi.org/10.3141/1883-01 doi: 10.3141/1883-01
|
| [31] | T. Liard, B. Piccoli, Well-posedness for scalar conservation laws with moving flux constraints, SIAM J. Appl. Math., 79 (2019), 641–667. |
| [32] |
T. Liard, B. Piccoli, On entropic solutions to conservation laws coupled with moving bottlenecks, Commun. Math. Sci., 19 (2021), 919–945. https://doi.org/10.4310/CMS.2021.v19.n4.a3 doi: 10.4310/CMS.2021.v19.n4.a3
|
| [33] |
M. J. Lighthill, G. B. Whitham, On kinematic waves II. A theory of traffic flow on long crowded roads, Proc. Roy. Soc. London. Ser. A., 229 (1955), 317–345. https://doi.org/10.1098/rspa.1955.0089 doi: 10.1098/rspa.1955.0089
|
| [34] |
G. Piacentini, P. Goatin, A. Ferrara, Traffic control via moving bottleneck of coordinated vehicles, IFAC-PapersOnLine, 51 (2018), 13–18. https://doi.org/10.1016/j.ifacol.2018.06.192 doi: 10.1016/j.ifacol.2018.06.192
|
| [35] | G. Piacentini, M. Čičić, A. Ferrara, K. Johansson, VACS equipped vehicles for congestion dissipation in multi-class ctm framework, 2019 18th European Control Conference (ECC), (2019), 2203–2208. |
| [36] | P. I. Richards, Shock waves on the highway, Operations Res., 4 (1956), 42–51. https://doi.org/10.1287/opre.4.1.42 |
| [37] |
M. D. Simoni, C. G. Claudel, A fast simulation algorithm for multiple moving bottlenecks and applications in urban freight traffic management, TRANSPORT RES B-METH, 104 (2017), 238–255. https://doi.org/10.1016/j.trb.2017.06.010 doi: 10.1016/j.trb.2017.06.010
|
| [38] |
R. E. Stern, S. Cui, M. L. Delle Monache, R. Bhadani, M. Bunting, M. Churchill, et al., Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments, Transp Res Part C Emerg Technol, 89 (2018), 205 –221. https://doi.org/10.1007/s00115-018-0494-4 doi: 10.1007/s00115-018-0494-4
|
| [39] |
A. Sylla, Influence of a slow moving vehicle on traffic: well-posedness and approximation for a mildly nonlocal model, Netw. Heterog. Media, 16 (2021), 221–256. https://doi.org/10.3934/nhm.2021005 doi: 10.3934/nhm.2021005
|
| [40] |
A. Talebpour, H. S. Mahmassani, Influence of connected and autonomous vehicles on traffic flow stability and throughput, Transp Res Part C Emerg Technol, 71 (2016), 143–163. https://doi.org/10.1016/j.trc.2016.07.007 doi: 10.1016/j.trc.2016.07.007
|
| [41] | S. Villa, P. Goatin, C. Chalons, Moving bottlenecks for the {A}w-{R}ascle-{Z}hang traffic flow model, Discrete Contin. Dyn. Syst. Ser. B, 22 (2017), 3921–3952. |
| [42] | M. Wang, W. Daamen, S. P. Hoogendoorn, B. van Arem, Cooperative car-following control: Distributed algorithm and impact on moving jam features, IEEE trans Intell Transp Syst, 17 (2016), 1459–1471. |
Figures(7)
Paola Goatin, Chiara Daini, Maria Laura Delle Monache, Antonella Ferrara. Interacting moving bottlenecks in traffic flow[J]. Networks and Heterogeneous Media, 2023, 18(2): 930-945. doi: 10.3934/nhm.2023040







 DownLoad:
DownLoad: