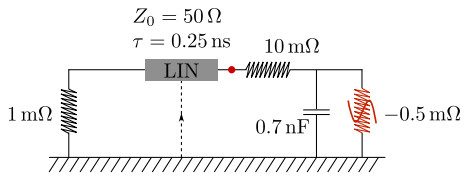
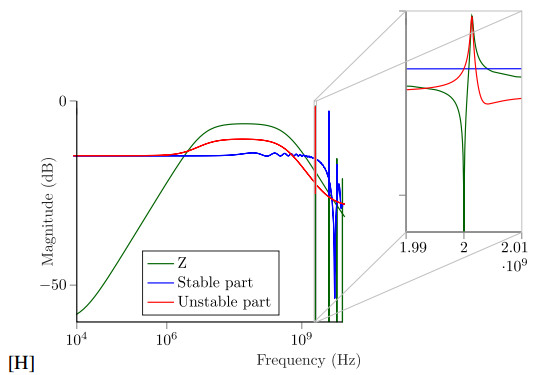
We study the properties of electronic circuits after linearization around a fixed operating point in the context of closed-loop stability analysis. When distributed elements, like transmission lines, are present in the circuit it is known that unstable circuits can be created without poles in the complex right half-plane. This undermines existing closed-loop stability analysis techniques that determine stability by looking for right half-plane poles. We observed that the problematic circuits rely on unrealistic elements with an infinite bandwidth. In this paper, we therefore define a class of realistic linearized components and show that a circuit composed of realistic elements is only unstable with poles in the complex right half-plane. Furthermore, we show that the amount of right half-plane poles in a realistic circuit is finite, even when distributed elements are present. In the second part of the paper, we provide examples of component models that are realistic and show that the class includes many existing models, including ones for passive devices, active devices and transmission lines.
Citation: Laurent Baratchart, Sylvain Chevillard, Adam Cooman, Martine Olivi, Fabien Seyfert. Linearized active circuits: transfer functions and stability[J]. Mathematics in Engineering, 2022, 4(5): 1-18. doi: 10.3934/mine.2022039
We study the properties of electronic circuits after linearization around a fixed operating point in the context of closed-loop stability analysis. When distributed elements, like transmission lines, are present in the circuit it is known that unstable circuits can be created without poles in the complex right half-plane. This undermines existing closed-loop stability analysis techniques that determine stability by looking for right half-plane poles. We observed that the problematic circuits rely on unrealistic elements with an infinite bandwidth. In this paper, we therefore define a class of realistic linearized components and show that a circuit composed of realistic elements is only unstable with poles in the complex right half-plane. Furthermore, we show that the amount of right half-plane poles in a realistic circuit is finite, even when distributed elements are present. In the second part of the paper, we provide examples of component models that are realistic and show that the class includes many existing models, including ones for passive devices, active devices and transmission lines.

| [1] | K. S. Kundert, The designer's guide to spice and spectre, Kluwer Academic, 1995. |
| [2] | A. Suarez, R. Quere, Stability analysis of nonlinear microwave circuits, Artech House, 2002. |
| [3] | A. Suarez, Check the stability: Stability analysis methods for microwave circuits, IEEE Microw. Mag., 16 (2015), 69–90. |
| [4] |
J. Jugo, J. Portilla, A. Anakabe, A. Suarez, J. M. Collantes, Closed-loop stability analysis of microwave amplifiers, Electron. Lett., 37 (2001), 226–228. doi: 10.1049/el:20010170

|
| [5] | J. Partington, Linear operators and linear systems, London Math. Soc., 2004. |
| [6] |
J. Partington, C. Bonnet, $H_{\infty}$ and BIBO stabilization of delay systems of neutral type, Syst. Control Lett., 52 (2004), 283–288. doi: 10.1016/j.sysconle.2003.09.014
|
| [7] | L. Baratchart, S. Chevillard, F. Seyfert, On transfer functions realizable with active electronic components, INRIA Research Report RR-8659, 2014. Available from: https://hal.inria.fr/hal-01098616. |
| [8] | V. Belevitch. Classical network theory, Holden-Day, 1968. |
| [9] | H. Carlin, P. Civalleri, Wideband circuit design, CRC Press, 1998. |
| [10] | W.-K. Chen, Applied graph theory, North-Holland, 1971. |
| [11] |
H. J. Carlin, D. C. Youla, Network synthesis with negative resistors, Proceedings of the IRE, 49 (1961), 907–920. doi: 10.1109/JRPROC.1961.287934
|
| [12] | R. Walter, Real and complex analysis, Mc Graw-Hill, 1982. |
| [13] |
P. M. Makila, J. R. Partington, Laguerre and Kautz shift approximation of delay systems, Int. J. Control, 72 (1999), 932–946. doi: 10.1080/002071799220678
|
| [14] |
M. G. Yoon, B. H. Lee, A new approximation method for time delay systems, IEEE T. Automat. Contr., 42 (1997), 1008–1011. doi: 10.1109/9.599985
|
| [15] |
L. Baratchart, S. Chevillard, Q. Tao, Minimax principle and lower bounds in $h^2$-rational approximation, J. Approx. Theory, 206 (2016), 17–47. doi: 10.1016/j.jat.2015.03.004
|
| [16] | D. S. Lubinsky, Spurious poles in diagonal rational approximation, In: Progress in approximation theory, New York: Springer, 1992,191–213. |
| [17] |
L. D. Philipp, A. Mahmood, B. L. Philipp, An improved refinable rational approximation to the ideal time delay, IEEE T. Circuits I, 46 (1999), 637–640. doi: 10.1109/81.762930
|
| [18] | J. W. Helton, O. Merino, Classical control using $H^\infty$ methods: an introduction to design, SIAM, 1998. |
| [19] | V. Peller, Hankel operators and their applications, Springer, 2003. |
| [20] | L. Baratchart, Rational and meromorphic approximation in $L^p$ of the circle: system-theoretic motivations, critical points and error rates, In: Computational methods and function theory, World Scientific Publish. Co, 1999, 45–78. |
| [21] | M. Olivi, F. Seyfert, J.-P. Marmorat, Identification of microwave filters by analytic and rational H2 approximation, Automatica, 49 (2013), 317–325. |
| [22] | K. Hoffman, Banach spaces of analytic functions, Prentice-Hall, 1962. |
| [23] |
A. Cooman, F. Seyfert, M. Olivi, S. Chevillard, L. Baratchart, Model-free closed-loop stability analysis: A linear functional approach, IEEE T. Microw. Theory, 66 (2018), 73–80. doi: 10.1109/TMTT.2017.2749222
|
| [24] | A. Cooman, F. Seyfert, S. Amari, Estimating unstable poles in simulations of microwave circuits, In: IEEE/MTT-S International Microwave Symposium - IMS, 2018, 97–100. |
| [25] | R. Lozano, B. Maschke, B. Brogliato, O. Egeland, Dissipative systems analysis and control: theory and applications, Berlin, Heidelberg: Springer-Verlag, 2000. |
| [26] |
N. Kottenstette, M. McCourt, M. Xia, V. Gupta, P. Antsaklis, On relationships among passivity, positive realness, and dissipativity in linear systems, Automatica, 50 (2014), 1003–1016. doi: 10.1016/j.automatica.2014.02.013
|
| [27] | B. Brogliato, R. Lozano, B. Maschke, O. Egeland, Dissipative systems analysis and control, Springer, 2007. |
| [28] | G. Miano, A. Maffucci, Transmission lines and lumped circuits, Academic Press, 2001. |
| [29] |
J. S. Toll, Causality and the dispersion relation: logical foundations, Phys. Rev., 104 (1956), 1760–1770. doi: 10.1103/PhysRev.104.1760
|
| [30] | G. Crupi, D. Schreurs, Microwave de-embedding, from theory to applications, Academic Press, 2014. |
| [31] | Y. Tsividis, Operation and modeling of the MOS transistor, Oxford University Press, 1999. |
| [32] |
M. Bagheri, Y. Tsividis, A small signal dc-to-high-frequency nonquasistatic model for the four-terminal mosfet valid in all regions of operation, IEEE T. Electron Dev., 32 (1985), 2383–2391. doi: 10.1109/T-ED.1985.22284
|
| [33] |
M. Biey, F. Bonani, M. Gilli, I. Maio, Qualitative analysis of the dynamics of the time-delayed Chua's circuit, IEEE T. Circuits I, 44 (1997), 486–500. doi: 10.1109/81.586022
|
| [34] | A. Cooman, F. Seyfert, M. Olivi, Software Pisa. Available from: https://project.inria.fr/pisa/examples/amplifier/. |
| [35] | S. Y. Kung, K. S. Arun, Singular value decomposition algorithms for linear system approximation and spectrum estimation, In: Advances in statistical signal processing, JAJ Press, 1987,203–250. |
| [36] |
C. Gordon, T. Blazeck, R. Mittra, Time-domain simulation of multiconductor transmission lines with frequency-dependent losses, IEEE T. Comput. Aid. D., 11 (1992), 1372–1387. doi: 10.1109/43.177401
|
| [37] | T. Ransford, Potential theory in the complex plane, Cambridge Univ. Press, 1995. |
Figures(6)

Laurent Baratchart, Sylvain Chevillard, Adam Cooman, Martine Olivi, Fabien Seyfert. Linearized active circuits: transfer functions and stability[J]. Mathematics in Engineering, 2022, 4(5): 1-18. doi: 10.3934/mine.2022039







 DownLoad:
DownLoad: