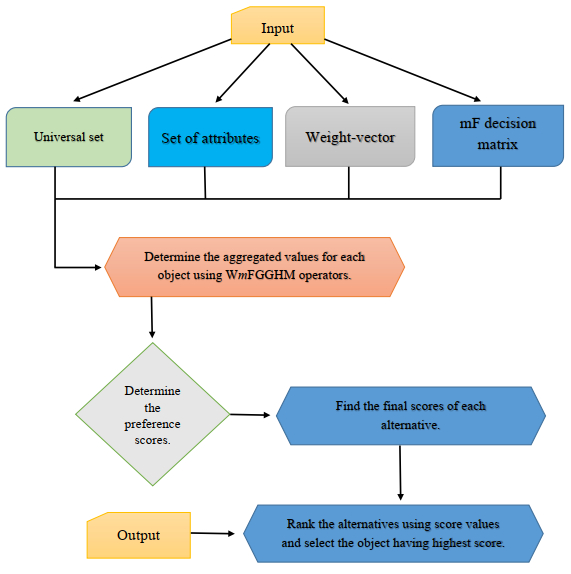
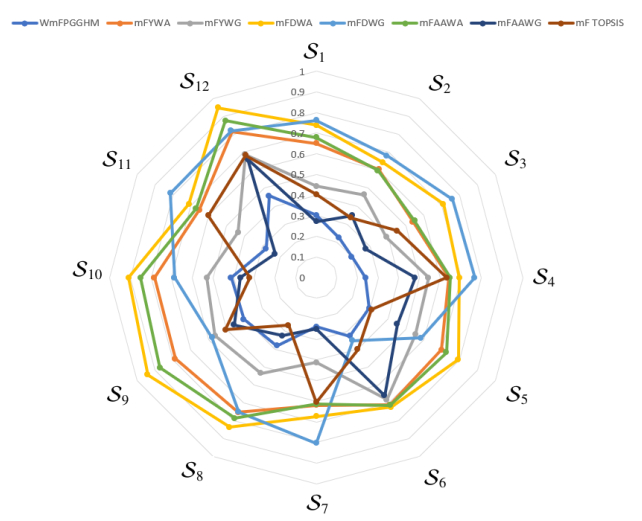
An $ m $-polar fuzzy ($ m $F) model offers a practical framework for decision-making by providing higher flexibility in handling uncertainties and preferences. The ability of $ m $F sets to tackle multiple reference points permits for a more nuanced analysis, leading to more accurate results in complex decision scenarios. This study was mainly devoted to introducing three novel aggregation operators (AGOs) for multi-criteria decision-making (MCDM) based on generalized geometric Heronian mean (GGHM) operations comprise the concept of $ m $F sets. The presented operators consisted of the weighted $ m $F power GGHM (W$ m $FPGGHM), ordered weighted $ m $F power GGHM averaging (OW$ m $FPGGHM), and hybrid $ m $F power GGHM (H$ m $FPGGHM) operators. Some essential fundamental properties of the proposed AGOs were investigated: idempotency, monotonicity, boundedness, and Abelian property. Furthermore, an algorithm based on the initiated W$ m $FPGGHM operators was developed to address diverse daily-life MCDM scenarios. Next, to validate the efficiency of the established algorithm, it was implemented in a daily-life MCDM problem involving urban transportation management. At last, a sensitivity analysis of the initiated AGOs was provided with existing $ m $F set-based operators involving Dombi, Yager, and Aczel-Alsina's operations-based AGOs.
Citation: Ghous Ali, Kholood Alsager. Novel Heronian mean based $ m $-polar fuzzy power geometric aggregation operators and their application to urban transportation management[J]. AIMS Mathematics, 2024, 9(12): 34109-34146. doi: 10.3934/math.20241626
An $ m $-polar fuzzy ($ m $F) model offers a practical framework for decision-making by providing higher flexibility in handling uncertainties and preferences. The ability of $ m $F sets to tackle multiple reference points permits for a more nuanced analysis, leading to more accurate results in complex decision scenarios. This study was mainly devoted to introducing three novel aggregation operators (AGOs) for multi-criteria decision-making (MCDM) based on generalized geometric Heronian mean (GGHM) operations comprise the concept of $ m $F sets. The presented operators consisted of the weighted $ m $F power GGHM (W$ m $FPGGHM), ordered weighted $ m $F power GGHM averaging (OW$ m $FPGGHM), and hybrid $ m $F power GGHM (H$ m $FPGGHM) operators. Some essential fundamental properties of the proposed AGOs were investigated: idempotency, monotonicity, boundedness, and Abelian property. Furthermore, an algorithm based on the initiated W$ m $FPGGHM operators was developed to address diverse daily-life MCDM scenarios. Next, to validate the efficiency of the established algorithm, it was implemented in a daily-life MCDM problem involving urban transportation management. At last, a sensitivity analysis of the initiated AGOs was provided with existing $ m $F set-based operators involving Dombi, Yager, and Aczel-Alsina's operations-based AGOs.

| [1] |
T. Saaty, How to make a decision: the analytic hierarchy process, Eur. J. Oper. Res., 48 (1990), 9–26. http://dx.doi.org/10.1016/0377-2217(90)90057-I doi: 10.1016/0377-2217(90)90057-I

|
| [2] | C. Hwang, K. Yoon, Multiple attribute decision making: methods and applications a state-of-the-art survey, Berlin: Springer-Verlag, 1981. http://dx.doi.org/10.1007/978-3-642-48318-9 |
| [3] | L. Zadeh, Fuzzy sets, Information and Control, 8 (1965), 338–353. http://dx.doi.org/10.1016/S0019-9958(65)90241-X |
| [4] |
R. Bellman, L. Zadeh, Decision-making in a fuzzy environment, Manage. Sci., 17 (1970), 141–164. http://dx.doi.org/10.1287/mnsc.17.4.B141 doi: 10.1287/mnsc.17.4.B141
|
| [5] |
M. Al-Shamiri, A. Farooq, M. Nabeel, G. Ali, D. Pamucar, Integrating TOPSIS and ELECTRE-I methods with cubic m-polar fuzzy sets and its application to the diagnosis of psychiatric disorders, AIMS Mathematics, 8 (2023), 11875–11915. http://dx.doi.org/10.3934/math.2023601 doi: 10.3934/math.2023601
|
| [6] |
K. Atanassov, Intuitionistic fuzzy sets, Fuzzy Set. Syst., 20 (1986), 87–96. http://dx.doi.org/10.1016/S0165-0114(86)80034-3 doi: 10.1016/S0165-0114(86)80034-3
|
| [7] | R. Yager, Pythagorean fuzzy subsets, Proceedings of IFSA World Congress and NAFIPS Annual Meeting (IFSA/NAFIPS), 2013, 57–61. http://dx.doi.org/10.1109/IFSA-NAFIPS.2013.6608375 |
| [8] | W. Zhang, (Yin) (Yang) bipolar fuzzy sets, Proceedings of IEEE International Conference on Fuzzy Systems, 1998, 835–840. http://dx.doi.org/10.1109/FUZZY.1998.687599 |
| [9] |
C. Jana, M. Pal, J. Wang, Bipolar fuzzy Dombi prioritized aggregation operators in multiple attribute decision making, Soft Comput., 24 (2020), 3631–3646. http://dx.doi.org/10.1007/s00500-019-04130-z doi: 10.1007/s00500-019-04130-z
|
| [10] |
T. Mahmood, U. Rehman, J. Ahmmad, Prioritization and selection of operating system by employing geometric aggregation operators based on Aczel-Alsina t-norm and t-conorm in the environment of bipolar complex fuzzy set, AIMS Mathematics, 8 (2023), 25220–25248. http://dx.doi.org/10.3934/math.20231286 doi: 10.3934/math.20231286
|
| [11] |
J. Chen, S. Li, S. Ma, X. Wang, $m$-polar fuzzy sets: An extension of bipolar fuzzy sets, Sci. World J., 2014 (2014), 416530. http://dx.doi.org/10.1155/2014/416530 doi: 10.1155/2014/416530
|
| [12] |
M. Asif, U. Ishtiaq, I. Argyros, Hamacher aggregation operators for Pythagorean fuzzy set and its application in multi-attribute decision-making problem, Spectrum of Operational Research, 2 (2024), 27–40. http://dx.doi.org/10.31181/sor2120258 doi: 10.31181/sor2120258
|
| [13] |
R. Imran, K. Ullah, Z. Ali, M. Akram, A multi-criteria group decision-making approach for robot selection using interval-valued intuitionistic fuzzy information and Aczel-Alsina Bonferroni means, Spectrum of Decision Making and Applications, 1 (2024), 1–32. http://dx.doi.org/10.31181/sdmap1120241 doi: 10.31181/sdmap1120241
|
| [14] |
A. Hussain, K. Ullah, An intelligent decision support system for spherical fuzzy Sugeno-Weber aggregation operators and real-life applications, Spectrum of Mechanical Engineering and Operational Research, 1 (2024), 177–188. http://dx.doi.org/10.31181/smeor11202415 doi: 10.31181/smeor11202415
|
| [15] |
R. Yager, The power average operator, IEEE T. Syst. Man Cy. A, 31 (2001), 724–731. http://dx.doi.org/10.1109/3468.983429 doi: 10.1109/3468.983429
|
| [16] |
Z. Xu, R. Yager, Power-geometric operators and their use in group decision making, IEEE T. Fuzzy Syst., 18 (2010), 94–105. http://dx.doi.org/10.1109/TFUZZ.2009.2036907 doi: 10.1109/TFUZZ.2009.2036907
|
| [17] |
Z. Xu, Approaches to multiple attribute group decision making based on intuitionistic fuzzy power aggregation operators, Knowl.-Based Syst., 24 (2011), 749–760. http://dx.doi.org/10.1016/j.knosys.2011.01.011 doi: 10.1016/j.knosys.2011.01.011
|
| [18] |
C. Jana, M. Pal, J. Wang, Bipolar fuzzy Dombi aggregation operators and its application in multiple-attribute decision-making process, J. Ambient Intell. Human. Comput., 10 (2019), 3533–3549. http://dx.doi.org/10.1007/s12652-018-1076-9 doi: 10.1007/s12652-018-1076-9
|
| [19] |
W. Wang, Y. Feng, Group decision making based on generalized intuitionistic fuzzy Yager weighted Heronian mean aggregation operator, Int. J. Fuzzy Syst., 26 (2024), 1364–1382. http://dx.doi.org/10.1007/s40815-023-01672-1 doi: 10.1007/s40815-023-01672-1
|
| [20] |
J. Wang, P. Wang, G. Wei, C. Wei, J. Wu, Some power Heronian mean operators in multiple attribute decision-making based on q-rung orthopair hesitant fuzzy environment, J. Exp. Theor. Artif. Intell., 32 (2020), 909–937. http://dx.doi.org/10.1080/0952813X.2019.1694592 doi: 10.1080/0952813X.2019.1694592
|
| [21] |
M. Javed, S. Javeed, T. Senapati, Multi-attribute group decision-making with T-spherical fuzzy Dombi power Heronian mean-based aggregation operators, Granul. Comput., 9 (2024), 71. http://dx.doi.org/10.1007/s41066-024-00487-1 doi: 10.1007/s41066-024-00487-1
|
| [22] |
A. Thilagavathy, S. Mohanaselvi, T-Spherical fuzzy TOPSIS method based on distance measures and Hamacher Heronian mean averaging aggregation operators and its application to waste management, Appl. Soft Comput., 162 (2024), 111868. http://dx.doi.org/10.1016/j.asoc.2024.111868 doi: 10.1016/j.asoc.2024.111868
|
| [23] |
P. Kakati, T. Senapati, S. Moslem, F. Pilla, Fermatean fuzzy archimedean Heronian mean-based model for estimating sustainable urban transport solutions, Eng. Appl. Artif. Intel., 127 (2024), 107349. http://dx.doi.org/10.1016/j.engappai.2023.107349 doi: 10.1016/j.engappai.2023.107349
|
| [24] |
Y. Zang, J. Zhao, W. Jiang, T. Zhao, Advanced linguistic complex T-spherical fuzzy Dombi-weighted power-partitioned Heronian mean operator and its application for emergency information quality assessment, Sustainability, 16 (2024), 3069. http://dx.doi.org/10.3390/su16073069 doi: 10.3390/su16073069
|
| [25] |
A. Hussain, K. Ullah, S. Latif, T. Senapati, S. Moslem, D. Esztergar-Kiss, Decision algorithm for educational institute selection with spherical fuzzy heronian mean operators and Aczel-Alsina triangular norm, Heliyon, 10 (2024), e28383. http://dx.doi.org/10.1016/j.heliyon.2024.e28383 doi: 10.1016/j.heliyon.2024.e28383
|
| [26] |
S. Yaacob, H. Hashim, N. Awang, N. Sulaiman, A. Al-Quran, L. Abdullah, Bipolar neutrosophic Dombi-based Heronian mean operators and their application in multi-criteria decision-making problems, Int. J. Comput. Intell. Syst., 17 (2024), 181. http://dx.doi.org/10.1007/s44196-024-00544-2 doi: 10.1007/s44196-024-00544-2
|
| [27] |
A. Thilagavathy, S. Mohanaselvi, T-spherical fuzzy Hamacher Heronian mean geometric operators for multiple criteria group decision making using SMART based TODIM method, Results in Control and Optimization, 14 (2024), 100357. http://dx.doi.org/10.1016/j.rico.2023.100357 doi: 10.1016/j.rico.2023.100357
|
| [28] |
S. Naz, A. Shafiq, M. Abbas, An approach for 2-tuple linguistic q-rung orthopair fuzzy MAGDM for the evaluation of historical sites with power Heronian mean, J. Supercomput., 80 (2024), 6435–6485. http://dx.doi.org/10.1007/s11227-023-05678-2 doi: 10.1007/s11227-023-05678-2
|
| [29] |
J. Li, M. Chen, S. Pei, Generalized q-rung orthopair fuzzy interactive Hamacher power average and Heronian means for MADM, Artif. Intell. Rev., 56 (2023), 8955–9008. http://dx.doi.org/10.1007/s10462-022-10376-1 doi: 10.1007/s10462-022-10376-1
|
| [30] |
H. Zhang, G. Wei, X. Chen, Spherical fuzzy Dombi power Heronian mean aggregation operators for multiple attribute group decision-making, Comput. Appl. Math., 41 (2022), 98. http://dx.doi.org/10.1007/s40314-022-01785-7 doi: 10.1007/s40314-022-01785-7
|
| [31] |
J. Mo, H. Huang, Archimedean geometric Heronian mean aggregation operators based on dual hesitant fuzzy set and their application to multiple attribute decision making, Soft Comput., 24 (2020), 14721–14733. http://dx.doi.org/10.1007/s00500-020-04819-6 doi: 10.1007/s00500-020-04819-6
|
| [32] |
X. Hu, S. Yang, Y. Zhu, Multiple attribute decision-making based on three-parameter generalized weighted Heronian mean, Mathematics, 9 (2021), 1363. http://dx.doi.org/10.3390/math9121363 doi: 10.3390/math9121363
|
| [33] |
M. Shi, F. Yang, Y Xiao, Intuitionistic fuzzy power geometric Heronian mean operators and their application to multiple attribute decision making, J. Intell. Fuzzy Syst., 37 (2019), 2651–2669. http://dx.doi.org/10.3233/JIFS-182903 doi: 10.3233/JIFS-182903
|
| [34] |
M. Deveci, D. Pamucar, I. Gokasar, B. Zaidan, L. Martinez, W. Pedrycz, Assessing alternatives of including social robots in urban transport using fuzzy trigonometric operators based decision-making model, Technol. Forecast. Soc., 194 (2023), 122743. http://dx.doi.org/10.1016/j.techfore.2023.122743 doi: 10.1016/j.techfore.2023.122743
|
| [35] |
S. Faizi, W. Salabun, N. Shaheen, A. Rehman, J. Watrobski, A novel multi-criteria group decision-making approach based on Bonferroni and Heronian mean operators under hesitant 2-tuple linguistic environment, Mathematics, 9 (2021), 1489. http://dx.doi.org/10.3390/math9131489 doi: 10.3390/math9131489
|
| [36] |
M. Akram, K. Ullah, G. Cirovic, D. Pamucar, Algorithm for energy resource selection using priority degree-based aggregation operators with generalized orthopair fuzzy information and Aczel-Alsina aggregation operators, Energies, 16 (2023), 2816. http://dx.doi.org/10.3390/en16062816 doi: 10.3390/en16062816
|
| [37] |
N. Waseem, M. Akram, J. Alcantud, Multi-attribute decision-making based on m-polar fuzzy Hamacher aggregation operators, Symmetry, 11 (2019), 1498. http://dx.doi.org/10.3390/sym11121498 doi: 10.3390/sym11121498
|
| [38] |
A. Khameneh, A. Kilicman, $m$-Polar fuzzy soft weighted aggregation operators and their applications in group decision-making, Symmetry, 10 (2018), 636. http://dx.doi.org/10.3390/sym10110636 doi: 10.3390/sym10110636
|
| [39] |
M. Akram, N. Yaqoob, G. Ali, W. Chammam, Extensions of Dombi aggregation operators for decision making under $m$-polar fuzzy information, J. Math., 2020 (2020), 4739567. http://dx.doi.org/10.1155/2020/4739567 doi: 10.1155/2020/4739567
|
| [40] |
S. Naz, M. Akram, M. Al-Shamiri, M. Khalaf, G. Yousaf, A new MAGDM method with 2-tuple linguistic bipolar fuzzy Heronian mean operators, Math. Biosci. Eng., 19 (2022), 3843–3878. http://dx.doi.org/10.3934/mbe.2022177 doi: 10.3934/mbe.2022177
|
| [41] |
G. Ali, A. Farooq, M. Al-Shamiri, Novel multiple criteria decision-making analysis under $m$-polar fuzzy aggregation operators with application, Math. Biosci. Eng., 20 (2023), 3566–35934. http://dx.doi.org/10.3934/mbe.2023166 doi: 10.3934/mbe.2023166
|
| [42] |
Z. Rehman, G. Ali, M. Asif, Y. Chen, M. Abidin, Identification of desalination and wind power plants sites using $m$-polar fuzzy Aczel-Alsina aggregation information, Sci. Rep., 14 (2024), 409. http://dx.doi.org/10.1038/s41598-023-50397-6 doi: 10.1038/s41598-023-50397-6
|
| [43] |
D. Yu, Intuitionistic fuzzy geometric Heronian mean aggregation operators, Appl. Soft Comput., 13 (2013), 1235–1246. http://dx.doi.org/10.1016/j.asoc.2012.09.021 doi: 10.1016/j.asoc.2012.09.021
|
| [44] |
A. Sarkar, S. Moslem, D. Esztergár-Kiss, M. Akram, L. Jin, T. Senapati, A hybrid approach based on dual hesitant q-rung orthopair fuzzy Frank power partitioned Heronian mean aggregation operators for estimating sustainable urban transport solutions, Eng. Appl. Artif. Intel., 124 (2023), 106505. http://dx.doi.org/10.1016/j.engappai.2023.106505 doi: 10.1016/j.engappai.2023.106505
|
| [45] |
M. Deveci, D. Pamucar, I. Gokasar, L. Martinez, M. Köppen, W. Pedrycz, Accelerating the integration of the metaverse into urban transportation using fuzzy trigonometric based decision making, Eng. Appl. Artif. Intel., 127 (2024), 107242. http://dx.doi.org/10.1016/j.engappai.2023.107242 doi: 10.1016/j.engappai.2023.107242
|
| [46] |
I. Hezam, D. Basua, A. Mishra, P. Rani, F. Kybernetes, Intuitionistic fuzzy gained and lost dominance score based on symmetric point criterion to prioritize zero-carbon measures for sustainable urban transportation, Kybernetes, 53 (2024), 3816–3847. http://dx.doi.org/10.1108/K-03-2023-0380 doi: 10.1108/K-03-2023-0380
|
| [47] |
Ö. Görçün, Evaluation of the selection of proper metro and tram vehicle for urban transportation by using a novel integrated MCDM approach, Sci. Progress, 104 (2021), 1–18. http://dx.doi.org/10.1177/0036850420950120 doi: 10.1177/0036850420950120
|
| [48] |
M. Lin, X. Li, R. Chen, H. Fujita, J. Lin, Picture fuzzy interactional partitioned Heronian mean aggregation operators: an application to MADM process, Artif. Intell. Rev., 55 (2022), 1171–1208. http://dx.doi.org/10.1007/s10462-021-09953-7 doi: 10.1007/s10462-021-09953-7
|
| [49] |
Ö. Görçün, D. Pamucar, H. Küçükönder, Selection of tramcars for sustainable urban transportation by using the modified WASPAS approach based on Heronian operators, Appl. Soft Comput., 151 (2024), 111127. http://dx.doi.org/10.1016/j.asoc.2023.111127 doi: 10.1016/j.asoc.2023.111127
|
| [50] |
S. Seker, N. Aydin, Sustainable public transportation system evaluation: a novel two-stage hybrid method based on IVIF-AHP and CODAS, Int. J. Fuzzy Syst., 22 (2020), 257–272. http://dx.doi.org/10.1007/s40815-019-00785-w doi: 10.1007/s40815-019-00785-w
|
| [51] |
N. Erdogan, D. Pamucar, S. Kucuksari, M. Deveci, A hybrid power Heronian function-based multicriteria decision-making model for workplace charging scheduling algorithms, IEEE T. Transp. Electr., 9 (2023), 1564–1578. http://dx.doi.org/10.1109/TTE.2022.3186659 doi: 10.1109/TTE.2022.3186659
|
| [52] |
M. Deveci, D. Pamucar, I. Gokasar, M. Isik, D. Coffman, Fuzzy Einstein WASPAS approach for the economic and societal dynamics of the climate change mitigation strategies in urban mobility planning, Struct. Change Econ. Dyn., 61 (2022), 1–17. http://dx.doi.org/10.1016/j.strueco.2022.01.009 doi: 10.1016/j.strueco.2022.01.009
|
| [53] |
D. Pamucar, M. Deveci, I. Gokasar, M. Işık, M. Zizovic, Circular economy concepts in urban mobility alternatives using integrated DIBR method and fuzzy Dombi CoCoSo model, J. Clean. Prod., 323 (2021), 129096. http://dx.doi.org/10.1016/j.jclepro.2021.129096 doi: 10.1016/j.jclepro.2021.129096
|
| [54] |
Z. Li, A. Liu, W. Shang, J. Li, H. Lu, H. Zhang, Sustainability assessment of regional transportation: an innovative fuzzy group decision-making model, IEEE T. Intell. Transp., 24 (2023), 15959–15973. http://dx.doi.org/10.1109/TITS.2023.3275141 doi: 10.1109/TITS.2023.3275141
|
| [55] |
Z. Ali, W. Emam, T. Mahmood, H. Wang, Archimedean Heronian mean operators based on complex intuitionistic fuzzy sets and their applications in decision-making problems, Heliyon, 10 (2024), e24767. http://dx.doi.org/10.1016/j.heliyon.2024.e24767 doi: 10.1016/j.heliyon.2024.e24767
|
| [56] |
A. Hussain, K. Ullah, H. Garg, T. Mahmood, A novel multi-attribute decision-making approach based on T-spherical fuzzy Aczel Alsina Heronian mean operators, Granul. Comput., 9 (2024), 21. http://dx.doi.org/10.1007/s41066-023-00442-6 doi: 10.1007/s41066-023-00442-6
|
| [57] |
U. Rehman, T. Mahmood, A study and performance evaluation of computer network under the environment of bipolar complex fuzzy partition Heronian mean operators, Adv. Eng. Softw., 180 (2023), 103443. http://dx.doi.org/10.1016/j.advengsoft.2023.103443 doi: 10.1016/j.advengsoft.2023.103443
|
| [58] |
N. Zhang, A. Ali, A. Hussain, K. Ullah, S. Yin, Decision algorithm for interval valued intuitionistic fuzzy Heronian mean aggregation operators based on Aczel Alsina T-norm, IEEE Access, 12 (2024), 55302–55325. http://dx.doi.org/10.1109/ACCESS.2024.3383844 doi: 10.1109/ACCESS.2024.3383844
|
| [59] |
J. Fan, H. Zhang, M. Wu, Dynamic multi-attribute decision-making based on interval-valued picture fuzzy geometric Heronian mean operators, IEEE Access, 10 (2022), 12070–12083. http://dx.doi.org/10.1109/ACCESS.2022.3142283 doi: 10.1109/ACCESS.2022.3142283
|
| [60] |
P. Liu, Q. Khan, A. Jamil, I. Haq, F. Hussain, Z. Ullah, A novel MAGDM technique based on $q$-rung orthopair fuzzy Aczel-Alsina power Heronian mean for sustainable supplier selection in organ transplantation networks for healthcare devices, Int. J. Fuzzy Syst., 26 (2024), 121–153. http://dx.doi.org/10.1007/s40815-023-01580-4 doi: 10.1007/s40815-023-01580-4
|
| [61] |
H. Wang, K. Ullah, T-spherical uncertain linguistic MARCOS method based on generalized distance and Heronian mean for multi-attribute group decision-making with unknown weight information, Complex Intell. Syst., 9 (2023), 1837–1869. http://dx.doi.org/10.1007/s40747-022-00862-y doi: 10.1007/s40747-022-00862-y
|
| [62] |
M. Akram, Shumaiza, J. Alcantud, An $m$-polar fuzzy PROMETHEE approach for AHP-assisted group decision-making, Math. Comput. Appl., 25 (2020), 26. http://dx.doi.org/10.3390/mca25020026 doi: 10.3390/mca25020026
|
Figures(2) / Tables(5)

Ghous Ali, Kholood Alsager. Novel Heronian mean based $ m $-polar fuzzy power geometric aggregation operators and their application to urban transportation management[J]. AIMS Mathematics, 2024, 9(12): 34109-34146. doi: 10.3934/math.20241626







 DownLoad:
DownLoad: