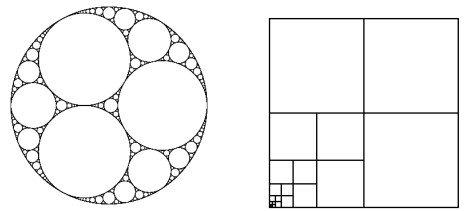
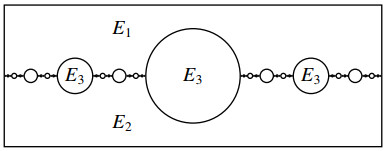
In this paper we study infinite isoperimetric clusters. An infinite cluster $ {\bf{E}} $ in $ \mathbb R^d $ is a sequence of disjoint measurable sets $ E_k\subset \mathbb R^d $, called regions of the cluster, $ k = 1, 2, 3, \dots $ A natural question is the existence of a cluster $ {\bf{E}} $ with given volumes $ a_k\ge 0 $ of the regions $ E_k $, having finite perimeter $ P({\bf{E}}) $, which is minimal among all the clusters with regions having the same volumes. We prove that such a cluster exists in the planar case $ d = 2 $, for any choice of the areas $ a_k $ with $ \sum \sqrt a_k < \infty $. We also show the existence of a bounded minimizer with the property $ P({\bf{E}}) = \mathcal H^1({\tilde\partial} {\bf{E}}) $, where $ {\tilde\partial} {\bf{E}} $ denotes the measure theoretic boundary of the cluster. Finally, we provide several examples of infinite isoperimetric clusters for anisotropic and fractional perimeters.
Citation: Matteo Novaga, Emanuele Paolini, Eugene Stepanov, Vincenzo Maria Tortorelli. Isoperimetric planar clusters with infinitely many regions[J]. Networks and Heterogeneous Media, 2023, 18(3): 1226-1235. doi: 10.3934/nhm.2023053
In this paper we study infinite isoperimetric clusters. An infinite cluster $ {\bf{E}} $ in $ \mathbb R^d $ is a sequence of disjoint measurable sets $ E_k\subset \mathbb R^d $, called regions of the cluster, $ k = 1, 2, 3, \dots $ A natural question is the existence of a cluster $ {\bf{E}} $ with given volumes $ a_k\ge 0 $ of the regions $ E_k $, having finite perimeter $ P({\bf{E}}) $, which is minimal among all the clusters with regions having the same volumes. We prove that such a cluster exists in the planar case $ d = 2 $, for any choice of the areas $ a_k $ with $ \sum \sqrt a_k < \infty $. We also show the existence of a bounded minimizer with the property $ P({\bf{E}}) = \mathcal H^1({\tilde\partial} {\bf{E}}) $, where $ {\tilde\partial} {\bf{E}} $ denotes the measure theoretic boundary of the cluster. Finally, we provide several examples of infinite isoperimetric clusters for anisotropic and fractional perimeters.

| [1] | L. Ambrosio, A. Braides, Functionals defined on partitions in sets of finite perimeter. Ⅱ. Semicontinuity, relaxation and homogenization, J. Math. Pures Appl., 69 (1990), 307–333. |
| [2] |
L. Ambrosio, V. Caselles, S. Masnou, Jean-Michel Morel, Connected components of sets of finite perimeter and applications to image processing, J. Eur. Math. Soc. (JEMS), 3 (2001), 39–92. https://doi.org/10.1007/PL00011302 doi: 10.1007/PL00011302

|
| [3] | L. Ambrosio, P. Tilli, Topics on analysis in metric spaces, In: Oxford Lecture Series in Mathematics and its Applications, Oxford: Oxford University Press, 2004. |
| [4] |
D. W. Boyd, The sequence of radii of the Apollonian packing, Math. Comp., 39 (1982), 249–254. https://doi.org/10.1090/S0025-5718-1982-0658230-7 doi: 10.1090/S0025-5718-1982-0658230-7
|
| [5] | L. Caffarelli, J. M. Roquejoffre, O. Savin, Nonlocal minimal surfaces, Comm. Pure Appl. Math., 63 (2010), 1111–1144. |
| [6] |
D. G. Caraballo, Existence of surface energy minimizing partitions of $\mathbb{R}^n$ satisfying volume constraints, Trans. Amer. Math. Soc., 369 (2017), 1517–1546. https://doi.org/10.1090/tran/6630 doi: 10.1090/tran/6630
|
| [7] |
A. Cesaroni, M. Novaga, Nonlocal minimal clusters in the plane, Nonlinear Anal., 199 (2020), 111945. https://doi.org/10.1016/j.na.2020.111945 doi: 10.1016/j.na.2020.111945
|
| [8] |
M. Colombo, F. Maggi, Existence and almost everywhere regularity of isoperimetric clusters for fractional perimeters, Nonlinear Anal., 153 (2017), 243–274. https://doi.org/10.1016/j.na.2016.09.019 doi: 10.1016/j.na.2016.09.019
|
| [9] |
G. De Philippis, A. De Rosa, F. Ghiraldin, Existence results for minimizers of parametric elliptic functionals, J. Geom. Anal., 30 (2020), 1450–1465. https://doi.org/10.1007/s12220-019-00165-8 doi: 10.1007/s12220-019-00165-8
|
| [10] | K. J. Falconer, The Geometry of Fractal Sets, Cambridge: Cambridge University Press, 1986. |
| [11] |
J. Foisy, M. Alfaro, J. Brock, N. Hodges, J. Zimba, The standard double soap bubble in R2 uniquely minimizes perimeter, Pacific J. Math., 159 (1993), 47–59. https://doi.org/10.2140/pjm.1993.159.47 doi: 10.2140/pjm.1993.159.47
|
| [12] |
R. L. Frank, R. Seiringer, Sharp fractional Hardy inequalities in half-spaces, Around the research of Vladimir Maz'ya. I, 11 (2010), 161–167. https://doi.org/10.1090/surv/162/06 doi: 10.1090/surv/162/06
|
| [13] |
T. C. Hales, The honeycomb conjecture, Discrete Comput. Geom., 25 (2001), 1–22. https://doi.org/10.1007/s004540010071 doi: 10.1007/s004540010071
|
| [14] |
K. E. Hirst, The Apollonian packing of circles, J. London Math. Soc., 42 (1967), 281–291. https://doi.org/10.1112/jlms/s1-42.1.281 doi: 10.1112/jlms/s1-42.1.281
|
| [15] | M. Hutchings, F. Morgan, M. Ritoré, A. Ros, Proof of the double bubble conjecture, Ann. of Math., 155 (2002), 459–489. |
| [16] |
E. Kasner, F. Supnick, The apollonian packing of circles, Proc. Natl. Acad. Sci. U.S.A., 29 (1943), 378–384. https://doi.org/10.1073/pnas.29.11.378 doi: 10.1073/pnas.29.11.378
|
| [17] |
G. Lawlor, F. Morgan, Paired calibrations applied to soap films, immiscible fluids, and surfaces or networks minimizing other norms, Pacific J. Math., 166 (1994), 55–83. https://doi.org/10.2140/pjm.1994.166.55 doi: 10.2140/pjm.1994.166.55
|
| [18] |
G. P. Leonardi, Partitions with prescribed mean curvatures, Manuscripta Math., 107 (2002), 111–133. https://doi.org/10.1007/s002290100230 doi: 10.1007/s002290100230
|
| [19] | F. Maggi, Sets of finite perimeter and geometric variational problems: an introduction to Geometric Measure Theory, Cambridge: Cambridge University Press, 2012. |
| [20] | E. Milman, J. Neeman, The structure of isoperimetric bubbles on $\mathbb{R}^n$ and $\mathbb{S}^n$, arXiv: 2205.09102, [Preprint], (2022), [cited 2023 Mar 31]. Available from: https://doi.org/10.48550/arXiv.2205.09102. |
| [21] | F. Morgan, Geometric measure theory. A Beginner's guide, Cambridge: Academic Press, 1987. |
| [22] |
F. Morgan, C. French, S. Greenleaf, Wulff clusters in $\mathbb R^2$, J. Geom. Anal., 8 (1998), 97–115. https://doi.org/10.1016/B978-0-12-506855-0.50005-2 doi: 10.1016/B978-0-12-506855-0.50005-2
|
| [23] |
M. Novaga, E. Paolini, Regularity results for boundaries in ${\mathbb R}^2$ with prescribed anisotropic curvature, Ann. Mat. Pura Appl., 184 (2005), 239–261. https://doi.org/10.1007/s10231-004-0112-x doi: 10.1007/s10231-004-0112-x
|
| [24] |
M. Novaga, E. Paolini, E. Stepanov, V. M. Tortorelli, Isoperimetric clusters in homogeneous spaces via concentration compactness, J. Geometric Anal., 32 (2022), 263. https://doi.org/10.1007/s12220-022-00939-7 doi: 10.1007/s12220-022-00939-7
|
| [25] | E. Paolini, E, Stepanov, Existence and regularity results for the steiner problem, Calc. Var. Partial. Differ. Equ., 46 (2013), 837–860. |
| [26] | E. Paolini, V. M. Tortorelli, The quadruple planar bubble enclosing equal areas is symmetric, Calc. Var. Partial Differ. Equ., 59 (2020), 1–9. |
| [27] |
W. Wichiramala, Proof of the planar triple bubble conjecture, J. Reine Angew. Math., 567 (2004), 1–49. https://doi.org/10.1515/crll.2004.011 doi: 10.1515/crll.2004.011
|
Figures(2)
Matteo Novaga, Emanuele Paolini, Eugene Stepanov, Vincenzo Maria Tortorelli. Isoperimetric planar clusters with infinitely many regions[J]. Networks and Heterogeneous Media, 2023, 18(3): 1226-1235. doi: 10.3934/nhm.2023053







 DownLoad:
DownLoad: