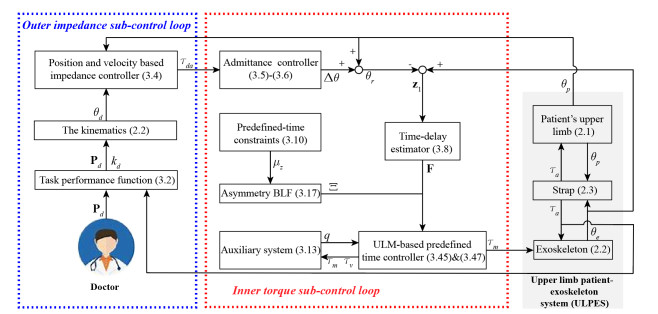
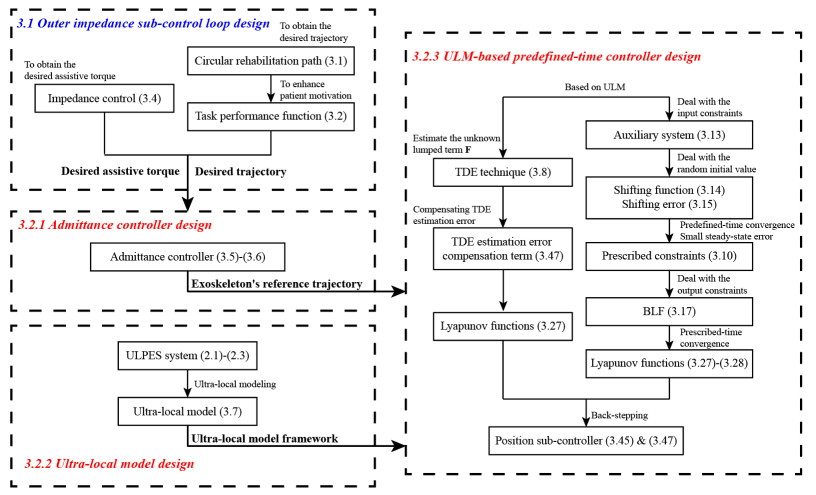
In this work, an ultra-local model-based predefined-time assist-as-needed controller (UPTAC) is presented for a upper limb patient-exoskeleton system (ULPES) under input and performance constraints. The designed UPTAC has a dual-loop control architecture. The outer impedance sub-control loop includes task performance function and impedance controller, which dynamically adjust the speed of rehabilitation exercises and obtain the desired assistive torque. Next, under the ultra-local model-based control framework, an inner torque sub-control loop was designed by combining barrier Lyapunov function and performance constraints, thereby achieving predefined time convergence and reducing the complexity of controller design. Finally, the effectiveness of UPTAC was verified through simulation.
Citation: Honglin Xie, Yangchun Wei. Ultra-local model-based predefined-time assist-as-needed control for upper limb patient-exoskeleton system under input and performance constraints[J]. AIMS Mathematics, 2025, 10(10): 23738-23772. doi: 10.3934/math.20251055
In this work, an ultra-local model-based predefined-time assist-as-needed controller (UPTAC) is presented for a upper limb patient-exoskeleton system (ULPES) under input and performance constraints. The designed UPTAC has a dual-loop control architecture. The outer impedance sub-control loop includes task performance function and impedance controller, which dynamically adjust the speed of rehabilitation exercises and obtain the desired assistive torque. Next, under the ultra-local model-based control framework, an inner torque sub-control loop was designed by combining barrier Lyapunov function and performance constraints, thereby achieving predefined time convergence and reducing the complexity of controller design. Finally, the effectiveness of UPTAC was verified through simulation.

| [1] |
Y. Wang, Y. Tian, Y. Guo, H. P. Wang, Active torque-based gait adjustment multi-level control strategy for lower limb patient–exoskeleton coupling system in rehabilitation training, Math. Comput. Simul., 215 (2024), 357–381. https://doi.org/10.1016/j.matcom.2023.08.020 doi: 10.1016/j.matcom.2023.08.020

|
| [2] |
P. Delgado, Y. Yihun, Integration of task-based exoskeleton with an assist-as-needed algorithm for patient-centered elbow rehabilitation, Sensors, 23 (2023), 2460. https://doi.org/10.3390/s23052460 doi: 10.3390/s23052460
|
| [3] |
Y. Wang, H. P. Wang, Y. Tian, Adaptive interaction torque-based AAN control for lower limb rehabilitation exoskeleton, ISA Trans., 128 (2022), 184–197. https://doi.org/10.1016/j.isatra.2021.10.009 doi: 10.1016/j.isatra.2021.10.009
|
| [4] |
K. Gui, U. X. Tan, H. Liu, D. Zhang, Electromyography-driven progressive assist-as-needed control for lower limb exoskeleton, IEEE Trans. Med. Robot. Bionics, 2 (2020), 50–58. https://doi.org/10.1109/TMRB.2020.2970222 doi: 10.1109/TMRB.2020.2970222
|
| [5] |
Y. Wang, Y. Guo, Y. Tao, Y. Tian, H. P. Wang, Human-centered active torque-based AAN impedance control for lower limb patient-exoskeleton coupling system in the rehabilitation, Int. J. Robust Nonlinear Control, 35 (2025), 4096–4131. https://doi.org/10.1002/rnc.6996 doi: 10.1002/rnc.6996
|
| [6] |
B. Guo, Z. Li, M. Huang, X. Li, J. Han, Patient's healthy-limb motion characteristic-based assist-as-needed control strategy for upper-limb rehabilitation robots, Sensors, 24 (2024), 2082. https://doi.org/10.3390/s24072082 doi: 10.3390/s24072082
|
| [7] |
J. C. Castiblanco, I. F. Mondragon, C. Alvarado-Rojas, J. D. Colorado, Assist-as-needed exoskeleton for hand joint rehabilitation based on muscle effort detection, Sensors, 21 (2021), 4372. https://doi.org/10.3390/s21134372 doi: 10.3390/s21134372
|
| [8] |
X. Tian, J. Lin, H. Liu, X. Huang, Event-triggered finite-time formation control of underactuated multiple ASVs with prescribed performance and collision avoidance, Sensors, 23 (2023), 6756. https://doi.org/10.3390/s23156756 doi: 10.3390/s23156756
|
| [9] |
L. Fang, L. Ma, S. Ding, Finite-time fuzzy output-feedback control for $ p $-norm stochastic nonlinear systems with output constraints, AIMS Math., 6 (2021), 2244–2267. https://doi.org/10.3934/math.2021136 doi: 10.3934/math.2021136
|
| [10] |
Y. Li, D. Wang, Z. Cai, On asymptotic fixed-time controller design for uncertain nonlinear systems with pure state constraints, AIMS Math., 8 (2023), 27151–27174. https://doi.org/10.3934/math.20231389 doi: 10.3934/math.20231389
|
| [11] |
K. P. Tee, S. S. Ge, E. H. Tay, Barrier Lyapunov functions for the control of output-constrained nonlinear systems, Automatica, 45 (2009), 918–927. https://doi.org/10.1016/j.automatica.2008.11.017 doi: 10.1016/j.automatica.2008.11.017
|
| [12] |
Y. Wei, H. P. Wang, Y. Tian, Prescribed performance model-free hybrid force/position control for 3-DOF SEA-based manipulator under partial state constraints, J. Franklin Inst., 361 (2024), 106944. https://doi.org/10.1016/j.jfranklin.2024.106944 doi: 10.1016/j.jfranklin.2024.106944
|
| [13] |
Y. Wei, H. P. Wang, Y. Tian, Asymmetric time-varying BLF-based model-free hybrid force/position control for SEA-based 2-DOF manipulator, Int. J. Adapt. Control Signal Process., 37 (2023), 1716–1737. https://doi.org/10.1002/acs.3599 doi: 10.1002/acs.3599
|
| [14] |
Y. Wei, H. P. Wang, Y. Tian, Fixed-time asymmetric barrier Lyapunov function-based model-free hybrid position/force control for 3-DOF SEA-based manipulator with output constraints, Int. J. Robust Nonlinear Control, 34 (2024), 1324–1342. https://doi.org/10.1002/rnc.7032 doi: 10.1002/rnc.7032
|
| [15] |
D. Tian, X. Song, Addressing complex state constraints in the integral barrier Lyapunov function-based adaptive tracking control, Int. J. Control, 96 (2023), 1202–1209. https://doi.org/10.1080/00207179.2022.2036371 doi: 10.1080/00207179.2022.2036371
|
| [16] |
H. Xue, Y. Ou, A novel asymmetric barrier Lyapunov function-based fixed-time ship berthing control under multiple state constraints, Ocean Eng., 281 (2023), 114756. https://doi.org/10.1016/j.oceaneng.2023.114756 doi: 10.1016/j.oceaneng.2023.114756
|
| [17] |
Y. H. Liu, L. L. Chen, Q. Zhou, C. Y. Su, Asymptotic output tracking control with prescribed transient performance of nonlinear systems in the presence of unknown dynamics, Int. J. Robust Nonlinear Control, 32 (2022), 9363–9379. https://doi.org/10.1002/rnc.6336 doi: 10.1002/rnc.6336
|
| [18] |
T. Zhang, P. Yan, Asymmetric integral barrier function-based tracking control of constrained robots, AIMS Math., 9 (2024), 319–339. https://doi.org/10.3934/math.2024019 doi: 10.3934/math.2024019
|
| [19] |
L. Zhi, J. Wu, Adaptive constraint control for nonlinear multi-agent systems with undirected graphs, AIMS Math., 6 (2021), 12051–12064. https://doi.org/10.3934/math.2021698 doi: 10.3934/math.2021698
|
| [20] |
X. Liang, C. Xu, D. Wang, Adaptive neural network control for marine surface vehicles platoon with input saturation and output constraints, AIMS Math., 5 (2020), 587–602. https://doi.org/10.3934/math.2020039 doi: 10.3934/math.2020039
|
| [21] |
Y. D. Song, S. Zhou, Tracking control of uncertain nonlinear systems with deferred asymmetric time-varying full state constraints, Automatica, 98 (2018), 314–322. https://doi.org/10.1016/j.automatica.2018.09.032 doi: 10.1016/j.automatica.2018.09.032
|
| [22] |
K. Shao, J. Zheng, Predefined-time sliding mode control with prescribed convergent region, IEEE/CAA J. Autom. Sinica, 9 (2022), 934–936. https://doi.org/10.1109/jas.2022.105575 doi: 10.1109/jas.2022.105575
|
| [23] |
J. Shao, W. W. Che, K. Shao, Nonlinear prescribed performance sliding mode control of hypersonic vehicles, Int. J. Robust Nonlinear Control, 34 (2024), 9928–9948. https://doi.org/10.1002/rnc.7503 doi: 10.1002/rnc.7503
|
| [24] |
S. Xie, Q. Chen, Adaptive nonsingular predefined-time control for attitude stabilization of rigid spacecrafts, IEEE Trans. Circuits Syst. Ⅱ, 69 (2022), 189–193. https://doi.org/10.1109/TCSII.2021.3078708 doi: 10.1109/TCSII.2021.3078708
|
| [25] |
Y. Zhu, J. Qiao, L. Guo, Adaptive sliding mode disturbance observer-based composite control with prescribed performance of space manipulators for target capturing, IEEE Trans. Ind. Electron., 66 (2019), 1973–1983. https://doi.org/10.1109/TIE.2018.2838065 doi: 10.1109/TIE.2018.2838065
|
| [26] |
D. Liu, Z. Liu, C. L. P. Chen, Y. Zhang, Prescribed-time containment control with prescribed performance for uncertain nonlinear multi-agent systems, J. Franklin Inst., 358 (2021), 1782–1811. https://doi.org/10.1016/j.jfranklin.2020.12.021 doi: 10.1016/j.jfranklin.2020.12.021
|
| [27] |
D. Ye, A. M. Zou, Z. Sun, Predefined-time predefined-bounded attitude tracking control for rigid spacecraft, IEEE Trans. Aerosp. Electron. Syst., 58 (2022), 464–472. https://doi.org/10.1109/TAES.2021.3103258 doi: 10.1109/TAES.2021.3103258
|
| [28] |
Y. Wang, H. P. Wang, Y. Tian, Nonlinear disturbance observer based flexible-boundary prescribed performance control for a lower limb exoskeleton, Int. J. Syst. Sci., 52 (2021), 3176–3189. https://doi.org/10.1080/00207721.2021.1922952 doi: 10.1080/00207721.2021.1922952
|
| [29] |
C. Ding, S. Ding, K. Mei, Adaptive prescribed-time SOSM controller design for nonlinear systems with prescribed performance, IEEE Trans. Circuits Syst. Ⅱ, 71 (2024), 1311–1315. https://doi.org/10.1109/TCSII.2023.3323661 doi: 10.1109/TCSII.2023.3323661
|
| [30] |
M. Fliess, C. Join, Model-free control, Int. J. Control, 86 (2013), 2228–2252. https://doi.org/10.1080/00207179.2013.810345 doi: 10.1080/00207179.2013.810345
|
| [31] |
X. Zhang, H. Wang, Y. Tian, L. Peyrodie, X. Wang, Model-free based neural network control with time-delay estimation for lower extremity exoskeleton, Neurocomputing, 272 (2018), 178–188. https://doi.org/10.1016/j.neucom.2017.06.055 doi: 10.1016/j.neucom.2017.06.055
|
| [32] |
Y. Wei, H. Wang, Y. Tian, Adaptive sliding mode observer–based integral sliding mode model-free torque control for elastomer series elastic actuator–based manipulator, Proc. Inst. Mech. Eng., Part Ⅰ: J. Syst. Control Eng., 236 (2022), 1010–1028. https://doi.org/10.1177/09596518211064757 doi: 10.1177/09596518211064757
|
| [33] |
D. He, X. Ma, Y. Tian, H. Wang, Model-free fractional-order finite-time control with prescribed performance for mechatronic systems under actuator failure, Nonlinear Dyn., 113 (2025), 2465–2486. https://doi.org/10.1007/s11071-024-10353-z doi: 10.1007/s11071-024-10353-z
|
| [34] |
Y. Wei, H. P. Wang, Y. Tian, Ultra-local model-based prescribed-time hybrid force/position control for 3-DOF series elastic actuator-based manipulator under input and output constraints, Commun. Nonlinear Sci. Numer. Simul., 150 (2025), 109013. https://doi.org/10.1016/j.cnsns.2025.109013 doi: 10.1016/j.cnsns.2025.109013
|
| [35] |
S. Han, H. Wang, Y. Tian, H. Yu, Enhanced extended state observer-based model-free force control for a series elastic actuator, Mech. Syst. Signal Process., 183 (2023), 109584. https://doi.org/10.1016/j.ymssp.2022.109584 doi: 10.1016/j.ymssp.2022.109584
|
| [36] | G. I. Mustafa, H. Wang, A new adaptive fuzzy logic control for nonlinear car active suspension systems based on the time-delay, J. Vib. Control., 2024. https://doi.org/10.1177/10775463241281395 |
| [37] |
D. He, H. Wang, Y. Tian, K. Zimenko, Event-triggered discrete extended state observer–based model-free controller for quadrotor position and attitude trajectory tracking, Proc. Inst. Mech. Eng., Part Ⅰ: J. Syst. Control Eng., 236 (2022), 754–771. https://doi.org/10.1177/09596518211055362 doi: 10.1177/09596518211055362
|
| [38] |
Y. Wei, H. P. Wang, Y. Tian, Ultra-local model-based prescribed performance assist-as-needed control for series elastic actuator-based upper limb patient-exoskeleton system under complex state constraints, Nonlinear Dyn., 112 (2024), 17183–17204. https://doi.org/10.1007/s11071-024-09928-7 doi: 10.1007/s11071-024-09928-7
|
| [39] |
Y. Wei, H. P. Wang, Y. Tian, Adaptive time-varying barrier Lyapunov function-based model-free hybrid position/force control for series elastic actuator-based manipulator, IEEE Trans. Circuits Syst. Ⅱ, 71 (2024), 271–275. https://doi.org/10.1109/TCSII.2023.3297600 doi: 10.1109/TCSII.2023.3297600
|
| [40] |
K. P. Tee, E. Burdet, C. M. Chew, T. E. Milner, A model of force and impedance in human arm movements, Biol. Cybern., 90 (2004), 368–375. https://doi.org/10.1007/s00422-004-0484-4 doi: 10.1007/s00422-004-0484-4
|
| [41] |
Y. Guo, H. Wang, Y. Tian, D. G. Caldwell, Task performance-based adaptive velocity assist-as-needed control for an upper limb exoskeleton, Biomed. Signal. Proces., 73 (2022), 103474. https://doi.org/10.1016/j.bspc.2021.103474 doi: 10.1016/j.bspc.2021.103474
|
| [42] |
H. Wang, X. Ye, Y. Tian, G. Zheng, N. Christov, Model-free–based terminal SMC of quadrotor attitude and position, IEEE Trans. Aerosp. Electron. Syst., 52 (2016), 2519–2528. https://doi.org/10.1109/TAES.2016.150303 doi: 10.1109/TAES.2016.150303
|
| [43] | H. Wang, Y. Tian, S. Ni, N. Christov, Intelligent proportional trajectory tracking controllers: Using ultra-local model and time delay estimation techniques, In: The 27th Chinese control and decision conference (2015 CCDC), 2015, 430–435. https://doi.org/10.1109/CCDC.2015.7161731 |
| [44] |
Z. Chen, J. Wang, K. Ma, X. Huang, T. Wang, Fuzzy adaptive two-bits-triggered control for nonlinear uncertain system with input saturation and output constraint, Int. J. Adapt. Control Signal Process., 34 (2020), 543–559. https://doi.org/10.1002/acs.3098 doi: 10.1002/acs.3098
|
| [45] |
Y. Wei, H. P. Wang, Y. Tian, Shifting asymmetric time-varying BLF-based model-free hybrid force/position control for 3-DOF SEA-based manipulator with random initial error, Appl. Math. Comput., 463 (2024), 128363. https://doi.org/10.1016/j.amc.2023.128363 doi: 10.1016/j.amc.2023.128363
|
| [46] |
C. C. Chen, Z. Y. Sun, A unified approach to finite-time stabilization of high-order nonlinear systems with an asymmetric output constraint, Automatica, 111 (2020), 108581. https://doi.org/10.1016/j.automatica.2019.108581 doi: 10.1016/j.automatica.2019.108581
|
| [47] |
S. Shi, H. Min, Y. Hu, Y. Sun, B. Wang, A novel hybrid scheme for fixed-time SOSM control of nonlinear uncertain systems subject to mismatched terms, Appl. Math. Comput., 386 (2020), 125511. https://doi.org/10.1016/j.amc.2020.125511 doi: 10.1016/j.amc.2020.125511
|
| [48] |
S. Ding, J. H. Park, C. C. Chen, Second-order sliding mode controller design with output constraint, Automatica, 112 (2020), 108704. https://doi.org/10.1016/j.automatica.2019.108704 doi: 10.1016/j.automatica.2019.108704
|
| [49] |
Z. Zhu, Y. Xia, M. Fu, Attitude stabilization of rigid spacecraft with finite-time convergence, Int. J. Robust Nonlinear Control, 21 (2011), 686–702. https://doi.org/10.1002/rnc.1624 doi: 10.1002/rnc.1624
|
| [50] |
C. Zhao, L. Guo, PID controller design for second order nonlinear uncertain systems, Sci. China Inf. Sci., 60 (2017), 022201. https://doi.org/10.1007/s11432-016-0879-3 doi: 10.1007/s11432-016-0879-3
|
| [51] |
Y. Wang, S. Li, D. Wang, F. Ju, B. Chen, H. Wu, Adaptive time-delay control for cable-driven manipulators with enhanced nonsingular fast terminal sliding mode, IEEE Trans. Ind. Electron., 68 (2021), 2356–2367. https://doi.org/10.1109/tie.2020.2975473 doi: 10.1109/tie.2020.2975473
|
| [52] |
M. Fliess, C. Join, An alternative to proportional-integral and proportional-integral-derivative regulators: Intelligent proportional-derivative regulators, Int. J. Robust Nonlinear Control, 32 (2022), 9512–9524. https://doi.org/10.1002/rnc.5657 doi: 10.1002/rnc.5657
|
| [53] |
G. Yang, State filtered disturbance rejection control, Nonlinear Dyn., 113 (2025), 6739–6755. https://doi.org/10.1007/s11071-024-10449-6 doi: 10.1007/s11071-024-10449-6
|
| [54] |
G. Yang, J. Yao, Multilayer neurocontrol of high-order uncertain nonlinear systems with active disturbance rejection, Int. J. Robust Nonlinear Control, 34 (2024), 2972–2987. https://doi.org/10.1002/rnc.7118 doi: 10.1002/rnc.7118
|
| [55] |
Z. Liu, O. Zhang, Y. Gao, Y. Zhao, Y. Sun, J. Liu, Adaptive neural network-based fixed-time control for trajectory tracking of robotic systems, IEEE Trans. Circuits Syst. Ⅱ, 70 (2023), 241–245. https://doi.org/10.1109/TCSII.2022.3194917 doi: 10.1109/TCSII.2022.3194917
|

Figures(19) / Tables(4)

Honglin Xie, Yangchun Wei. Ultra-local model-based predefined-time assist-as-needed control for upper limb patient-exoskeleton system under input and performance constraints[J]. AIMS Mathematics, 2025, 10(10): 23738-23772. doi: 10.3934/math.20251055







 DownLoad:
DownLoad: