In this study, we attempt to obtain the approximate solution for the time-space fractional linear and nonlinear diffusion equations. A finite difference approach is given for the solution of both linear and nonlinear fractional order diffusion problems. The Riesz fractional derivative in space is specifically approximated using the centered difference scheme. A system of Atangana-Baleanu Caputo equations that have been converted through spatial discretization is solved using a newly developed modified Simpson's 1/3 formula. A study of the proposed scheme is done to ascertain its stability and convergence. It has been shown that for mesh size h and time steps $ \delta t $ the recommended method converges at a rate of $ O(\delta t^2 + h^2) $. Based on graphic results and numerical examples, the application of the model is also examined.
Citation: Mubashara Wali, Sadia Arshad, Sayed M Eldin, Imran Siddique. Numerical approximation of Atangana-Baleanu Caputo derivative for space-time fractional diffusion equations[J]. AIMS Mathematics, 2023, 8(7): 15129-15147. doi: 10.3934/math.2023772
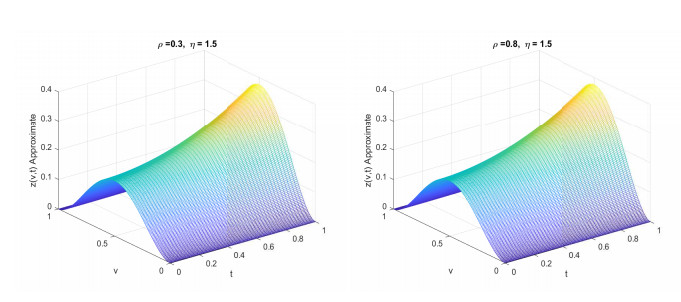
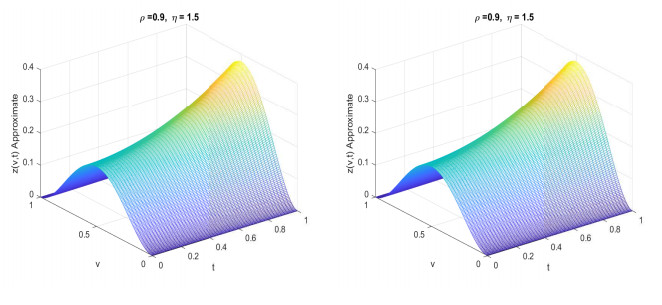
In this study, we attempt to obtain the approximate solution for the time-space fractional linear and nonlinear diffusion equations. A finite difference approach is given for the solution of both linear and nonlinear fractional order diffusion problems. The Riesz fractional derivative in space is specifically approximated using the centered difference scheme. A system of Atangana-Baleanu Caputo equations that have been converted through spatial discretization is solved using a newly developed modified Simpson's 1/3 formula. A study of the proposed scheme is done to ascertain its stability and convergence. It has been shown that for mesh size h and time steps $ \delta t $ the recommended method converges at a rate of $ O(\delta t^2 + h^2) $. Based on graphic results and numerical examples, the application of the model is also examined.

| [1] |
H. M. Baskonus, H. Bulut, Regarding on the prototype solutions for the nonlinear fractional-order biological population model, AIP Conf. Proc., 1738 (2016), 290004. https://doi.org/10.1063/1.4952076 doi: 10.1063/1.4952076

|
| [2] |
H. M. Baskonus, T. Mekkaoui, Z. Hammouch, H. Bulut, Active control of a chaotic fractional order economic system, Entropy, 17 (2015), 5771–5783. https://doi.org/10.3390/e17085771 doi: 10.3390/e17085771
|
| [3] |
F. Evirgen, N. Ozdemir, Multistage adomian decomposition method for solving NLP problems over a nonlinear fractional dynamical system, ASME J. Comput. Nonlinear Dyn., 6 (2011), 021003–021009. https://doi.org/10.1115/1.4002393 doi: 10.1115/1.4002393
|
| [4] | K. S. Miller, B. Ross, An Introduction to the Fractional Calculus and Fractional Differential Equations, New York: Wiley, 1993. |
| [5] |
M. Caputo, M. Fabrizio, A new definition of fractional derivative without singular kernel, Progr. Fract. Differ. Appl., 1 (2015), 73–85. http://doi.org/10.12785/pfda/010201 doi: 10.12785/pfda/010201
|
| [6] |
B. S. Alkahtani, O. J. Alkahtani, R. S. Dubey, P. Goswami, Solution of fractional oxygen diffusion problem having without singular kernel, J. Nonlinear Sci. Appl., 10 (2017), 299–301. http://doi.org/10.22436/jnsa.010.01.28 doi: 10.22436/jnsa.010.01.28
|
| [7] |
J. Hristov, An approximate analytical (integral-balance) solution to a nonlinear heat diffusion equation, Therm. Sci., 19 (2015), 723–733. http://doi.org/10.2298/TSCI140326074H doi: 10.2298/TSCI140326074H
|
| [8] | Z. Q. Wu, J. X. Yin, H. L. Li, J. N. Zhao, Nonlinear Diffusion Equation, Singapore: World Scientific, 2001. https://doi.org/10.1142/4782 |
| [9] |
L. Chen, R. H. Nochetto, E. Otárola, A. J. Salgado, A PDE approach to fractional diffusion: A posteriori error analysis, J. Comput. Phys., 293 (2015), 339–358. https://doi.org/10.1016/j.jcp.2015.01.001 doi: 10.1016/j.jcp.2015.01.001
|
| [10] |
Z. Q. Chen, M. M. Meerschaert, E. Nane, Space-time fractional diffusion on bounded domains, J. Math. Anal. Appl., 393 (2012), 479–488. https://doi.org/10.48550/arXiv.1109.2881 doi: 10.48550/arXiv.1109.2881
|
| [11] |
M. M. Meerschaert, D. A. Benson, H. P. Scheffler, B. Baeumer, Stochastic solution of space-time fractional diffusion equations, Phys. Rev., 65 (2002), 041103. https://doi.org/10.1103/PhysRevE.65.041103 doi: 10.1103/PhysRevE.65.041103
|
| [12] |
J. W. Hanneken, B. N. Narahari Achar, D. M. Vaught, K. L. Harrington, A random walk simulation of fractional diffusion, J. Mol. Liq., 114 (2004), 153–157. https://doi.org/10.1016/j.molliq.2004.02.013 doi: 10.1016/j.molliq.2004.02.013
|
| [13] |
F. J. Molz, G. J. Fix, S. Lu, A physical interpretation for the fractional derivative in Lévy diffusion, Appl. Math. Lett., 15 (2002), 907–911. https://doi.org/10.1016/S0893-9659(02)00062-9 doi: 10.1016/S0893-9659(02)00062-9
|
| [14] |
O. J. J. Algahtani, Comparing the Atangana-Baleanu and Caputo-Fabrizio derivative with fractional order: Allen Cahn model, Chaos Solitons Fractals, 89 (2016), 552–559. https://doi.org/10.1016/j.chaos.2016.03.026 doi: 10.1016/j.chaos.2016.03.026
|
| [15] |
Y. Liu, E. Y. Fan, B. L. Yin, H. Li, Fast algorithm based on the novel approximation formula for the Caputo-Fabrizio fractional derivative, AIMS Mathematics, 5 (2020), 1729–1744. https://doi.org/10.3934/math.2020117 doi: 10.3934/math.2020117
|
| [16] |
A. Atangana, D. Baleanu, New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model, Therm. Math., 20 (2016), 763–769. https://doi.org/10.2298/TSCI160111018A doi: 10.2298/TSCI160111018A
|
| [17] |
M. I. Syam, M. Al-Refai, Fractional differential equations with Atangana-Baleanu fractional derivative: Analysis and applications, Chaos Solitons Fractals, 2 (2019), 100013. https://doi.org/10.1016/j.csfx.2019.100013 doi: 10.1016/j.csfx.2019.100013
|
| [18] |
N. Sene, K. Abdelmalek, Analysis of the fractional diffusion equations described by Atangana-Baleanu-Caputo fractional derivative, Chaos Solitons Fractals, 127 (2019), 158–164. https://doi.org/10.1016/j.chaos.2019.06.036 doi: 10.1016/j.chaos.2019.06.036
|
| [19] |
S. Kumar, P. Pandey, Quasi wavelet numerical approach of non-linear reaction diffusion and integro reaction-diffusion equation with Atangana-Baleanu time fractional derivative, Chaos Solitons Fractals, 130 (2020), 109456. https://doi.org/10.1016/j.chaos.2019.109456 doi: 10.1016/j.chaos.2019.109456
|
| [20] |
S. Yadav, R. K. Pandey, A. K. Shukla, Numerical approximations of Atangana-Baleanu Caputo derivative and its application, Chaos Solitons Fractals, 118 (2019), 58–64. https://doi.org/10.1016/j.chaos.2018.11.009 doi: 10.1016/j.chaos.2018.11.009
|
| [21] |
S. Kumar, P. Pandey, A Legendre spectral finite difference method for the solution of non-linear space-time fractional Burger's-Huxley and reaction-diffusion equation with Atangana-Baleanu derivative, Chaos Solitons Fractals, 130 (2020), 109402. https://doi.org/10.1016/j.chaos.2019.109402 doi: 10.1016/j.chaos.2019.109402
|
| [22] |
O. Alqahtani, Analytical solution of non-linear fractional diffusion equation, Adv. Difference Equ., 2021 (2021), 327. https://doi.org/10.1186/s13662-021-03480-z doi: 10.1186/s13662-021-03480-z
|
| [23] |
A. G. M. Selvam, S. B. Jacob, Stability of Atangana-Baleanu fractional order differential equation with numerical approximation, J. Phys.: Conf. Ser., 2070 (2021), 012086. https://doi.org/10.1088/1742-6596/2070/1/012086 doi: 10.1088/1742-6596/2070/1/012086
|
| [24] |
N. H. Can, N. H. Luc, D. Baleanu, Y. Zhou, L. D. Long, Inverse source problem for time fractional diffusion equation with Mittag-Leffler kernel, Adv. Difference Equ., 2020 (2020), 210. https://doi.org/10.1186/s13662-020-02657-2 doi: 10.1186/s13662-020-02657-2
|
| [25] |
Q. Yang, F. Liu, I. Turner, Numerical methods for fractional partial differential equations with Riesz space fractional derivatives, Appl. Math. Model., 34 (2010), 200–218. https://doi.org/10.1016/j.apm.2009.04.006 doi: 10.1016/j.apm.2009.04.006
|
| [26] |
M. D. Ortigueira, Riesz potential operators and inverses via fractional centred derivatives, Int. J. Math. Math. Sci., 2006 (2006), 048391. https://doi.org/10.1155/IJMMS/2006/48391 doi: 10.1155/IJMMS/2006/48391
|
| [27] |
C. Celik, M. Duman, Crank-Nicolson method for the fractional diffusion equation with the Riesz fractional derivative, J. Comput. Phys., 231 (2012), 1743–1750. https://doi.org/10.1016/j.jcp.2011.11.008 doi: 10.1016/j.jcp.2011.11.008
|
| [28] |
J. F. Huang, D. D. Yang, A unified difference-spectral method for time-space fractional diffusion equations, Int. J. Comput. Math., 94 (2017), 1172–1184. https://doi.org/10.1080/00207160.2016.1184262 doi: 10.1080/00207160.2016.1184262
|
Figures(6) / Tables(2)

Mubashara Wali, Sadia Arshad, Sayed M Eldin, Imran Siddique. Numerical approximation of Atangana-Baleanu Caputo derivative for space-time fractional diffusion equations[J]. AIMS Mathematics, 2023, 8(7): 15129-15147. doi: 10.3934/math.2023772







 DownLoad:
DownLoad: