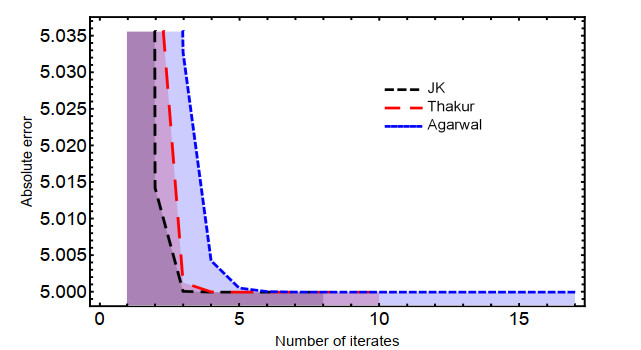
The goal of this manuscript is to introduce the JK iterative scheme for the numerical reckoning of fixed points in generalized contraction mappings. Also, weak and strong convergence results are investigated under this scheme in the setting of Banach spaces. Moreover, two numerical examples are given to illustrate that the JK iterative scheme is more effective than some other iterative schemes in the literature. Ultimately, as an application, the JK iterative scheme is applied to solve a discrete composite functional differential equation of the Volterra-Stieljes type.
Citation: Junaid Ahmad, Kifayat Ullah, Hasanen A. Hammad, Reny George. On fixed-point approximations for a class of nonlinear mappings based on the JK iterative scheme with application[J]. AIMS Mathematics, 2023, 8(6): 13663-13679. doi: 10.3934/math.2023694
The goal of this manuscript is to introduce the JK iterative scheme for the numerical reckoning of fixed points in generalized contraction mappings. Also, weak and strong convergence results are investigated under this scheme in the setting of Banach spaces. Moreover, two numerical examples are given to illustrate that the JK iterative scheme is more effective than some other iterative schemes in the literature. Ultimately, as an application, the JK iterative scheme is applied to solve a discrete composite functional differential equation of the Volterra-Stieljes type.

| [1] |
O. Bouftouth, S. Kabbaj, T. Abdeljawad, A. Khan, Quasi controlled K -metric spaces over $C^{\ast}$-algebras with an application to stochastic integral equations, CMES Comput. Model. Eng. Sci., 135 (2023), 2649–2663. https://doi.org/10.32604/cmes.2023.023496 doi: 10.32604/cmes.2023.023496

|
| [2] | K. Gopalan, S. T. Zubair, T. Abdeljawad, New fixed point theorems in operator valued extended hexagonal $b$-like metric spaces, Palestine J. Math., 11 (2022), 48–56. |
| [3] |
K. Ullah, J. Ahmad, M. Arshad, Z. H. Ma, Approximation of fixed points for enriched Suzuki nonexpansive operators with an application in Hilbert spaces, Axioms, 11 (2022), 14. https://doi.org/10.3390/axioms11010014 doi: 10.3390/axioms11010014
|
| [4] | S. Banach, Sur les operations dans les ensembles abstraits et leur application aux equations integrales, Fund. Math., 3 (1922), 133–181. http://eudml.org/doc/213289 |
| [5] |
F. E. Browder, Nonexpansive nonlinear operators in a Banach space, Proc. Natl. Acad. Sci., 54 (1965), 1041–1044. https://doi.org/10.1073/pnas.54.4.1041 doi: 10.1073/pnas.54.4.1041
|
| [6] |
S. Reich, The fixed point property for nonexpansive mappings I, Amer. Math. Monthly, 83 (1976), 266–268. https://doi.org/10.1080/00029890.1976.11994096 doi: 10.1080/00029890.1976.11994096
|
| [7] |
T. Suzuki, Fixed point theorems and convergence theorems for some generalized non-expansive mapping, J. Math. Anal. Appl. 340 (2008), 1088–1095. https://doi.org/10.1016/j.jmaa.2007.09.023 doi: 10.1016/j.jmaa.2007.09.023
|
| [8] | R. P. Agarwal, D. O'Regon, D. R. Sahu, Iterative construction of fixed points of nearly asymptotically nonexpansive mappings, J. Nonlinear Convex Anal., 8 (2007), 61–79. |
| [9] |
M. A. Noor, New approximation schemes for general variational inequalities, J. Math. Anal. Appl., 251 (2000), 217–229. https://doi.org/10.1006/jmaa.2000.7042 doi: 10.1006/jmaa.2000.7042
|
| [10] |
B. S. Thakur, D. Thakur, M. Postolache, A new iterative scheme for numerical reckoning fixed points of Suzuki's generalized nonexpansive mappings, Appl. Math. Comput., 275 (2016), 147–155. https://doi.org/10.1016/j.amc.2015.11.065 doi: 10.1016/j.amc.2015.11.065
|
| [11] |
J. Ahmad, K. Ullah, Z. H. Ma, A new iterative method for Suzuki mappings in Banach spaces, J. Math., 2021 (2021), 6622931. https://doi.org/10.1155/2021/6622931 doi: 10.1155/2021/6622931
|
| [12] |
H. A. Hammad, H. Ur Rehman, M. Zayed, Applying faster algorithm for obtaining convergence, stability, and data dependence results with application to functional-integral equations, AIMS Mathematics, 7 (2022), 19026–19056. https://doi.org/10.3934/math.20221046 doi: 10.3934/math.20221046
|
| [13] |
H. A. Hammad, H. Ur Rehman, M. De la Sen, A novel four-step iterative scheme for approximating the fixed point with a supportive application, Inf. Sci. Lett., 10 (2021), 333–339. http://doi.org/10.18576/isl/100214 doi: 10.18576/isl/100214
|
| [14] |
H. A. Hammad, H. Ur Rehman, M. De la Sen, Shrinking projection methods for accelerating relaxed inertial Tseng-type algorithm with applications, Math. Probl. Eng., 2020 (2020), 7487383. https://doi.org/10.1155/2020/7487383 doi: 10.1155/2020/7487383
|
| [15] |
T. M. Tuyen, H. A. Hammad, Effect of shrinking projection and CQ-methods on two inertial forward-backward algorithms for solving variational inclusion problems, Rend. Circ. Mat. Palermo (2), 70 (2021), 1669–1683. https://doi.org/10.1007/s12215-020-00581-8 doi: 10.1007/s12215-020-00581-8
|
| [16] |
R. Pandey, R. Pant, V. Rakocevic, R. Shukla, Approximating fixed points of a general class of nonexpansive mappings in Banach spaces with applications, Results Math., 74 (2019), 7. https://doi.org/10.1007/s00025-018-0930-6 doi: 10.1007/s00025-018-0930-6
|
| [17] |
S. Reich, Some remarks concerning contraction mappings, Canad. Math. Bull., 14 (1971), 121–124. https://doi.org/10.4153/CMB-1971-024-9 doi: 10.4153/CMB-1971-024-9
|
| [18] |
W. R. Mann, Mean value methods in iteration, Proc. Amer. Math. Soc., 4 (1953), 506–510. https://doi.org/10.1090/S0002-9939-1953-0054846-3 doi: 10.1090/S0002-9939-1953-0054846-3
|
| [19] |
S. Ishikawa, Fixed points by a new iteration method, Proc. Amer. Math. Soc., 44 (1974), 147–150. https://doi.org/10.1090/S0002-9939-1974-0336469-5 doi: 10.1090/S0002-9939-1974-0336469-5
|
| [20] | M. Abbas, T. Nazir, A new faster iteration process applied to constrained minimization and feasibility problems, Mat. Vestn., 66 (2014), 223–234. http://hdl.handle.net/2263/43663 |
| [21] | K. Goebel, S. Reich, Uniform Convexity, Hyperbolic Geometry, and Nonexpansive Mappings, 1983. |
| [22] |
J. A. Clarkson, Uniformly convex spaces, Trans. Amer. Math. Soc., 40 (1936) 396–414. https://doi.org/10.1090/S0002-9947-1936-1501880-4 doi: 10.1090/S0002-9947-1936-1501880-4
|
| [23] |
Z. Opial, Weak convergence of the sequence of successive approximations for nonexpansive mappings, Bull. Amer. Math. Soc., 73 (1967), 591–597. https://doi.org/10.1090/S0002-9904-1967-11761-0 doi: 10.1090/S0002-9904-1967-11761-0
|
| [24] | R. P. Agarwal, D. O'Regan, D. R. Sahu, Fixed Point Theory for Lipschitzian-Type Mappings with Applications, New York: Springer, (2009). |
| [25] | K. Deimling, Nonlinear Functional Analysis, Heidelberg: Springer Berlin, 1985. https://doi.org/10.1007/978-3-662-00547-7 |
| [26] |
R. Pant, R. Pandey, Existence and convergence results for a class of nonexpansive type mappings in hyperbolic spaces, Appl. Gen. Topol., 20 (2019), 281–295. http://doi.org/10.4995/agt.2019.11057 doi: 10.4995/agt.2019.11057
|
| [27] |
J. Schu, Weak and strong convergence to fixed points of asymptotically nonexpansive mappings, Bull. Aust. Math. Soc., 43 (1991), 153–159. https://doi.org/10.1017/S0004972700028884 doi: 10.1017/S0004972700028884
|
| [28] |
H. F. Senter, W. G. Dotson, Approximating fixed points of nonexpansive mappings, Proc. Amer. Math. Soc., 44 (1974), 375–380. https://doi.org/10.2307/2040440 doi: 10.2307/2040440
|
| [29] |
A. M. A. El-Sayed, Y. M. Y. Omar, On the weak solutions of a delay composite functional integral equation of Volterr-Stieljes type in reflexive Banach space, Mathematics, 10 (2022), 245. https://doi.org/10.3390/math10020245 doi: 10.3390/math10020245
|
| [30] |
J. Banas, K. Sadarangani, Solvability of Volterra-Stieljes operator-integral equations and their application, Comput. Math. Appl., 41 (2001), 1535–1544. https://doi.org/10.1016/S0898-1221(01)00118-3 doi: 10.1016/S0898-1221(01)00118-3
|
| [31] |
H. A. Hammad, H. Ur Rehman, M. De la Sen, A New four-step iterative procedure for approximating fixed points with application to 2D Volterra integral equations, Mathematics, 10 (2022), 4257. https://doi.org/10.3390/math10224257 doi: 10.3390/math10224257
|
| [32] |
H. A. Hammad, M. Zayed, Solving a system of differential equations with infinite delay by using tripled fixed point techniques on graphs, Symmetry, 14 (2022), 1388. https://doi.org/10.3390/sym14071388 doi: 10.3390/sym14071388
|
| [33] |
H. A. Hammad, P. Agarwal, S. Momani, F. Alsharari, Solving a fractional-order differential equation using rational symmetric contraction mappings, Fractal Fract, 5 (2021), 159. https://doi.org/10.3390/fractalfract5040159 doi: 10.3390/fractalfract5040159
|
| [34] | H. A. H. Saleem, A. M. A. El-Sayed, Weak solution for fractional order integral equations in reflexive Banach spaces, Math. Slovaca, 55 (2005), 169–181. http://eudml.org/doc/31966 |
Figures(1) / Tables(5)

Junaid Ahmad, Kifayat Ullah, Hasanen A. Hammad, Reny George. On fixed-point approximations for a class of nonlinear mappings based on the JK iterative scheme with application[J]. AIMS Mathematics, 2023, 8(6): 13663-13679. doi: 10.3934/math.2023694







 DownLoad:
DownLoad: