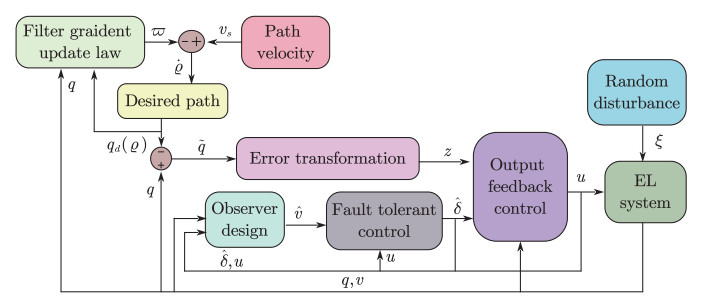
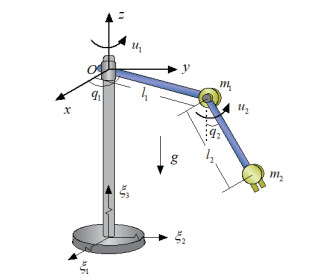
In this paper, a fault-tolerant output feedback maneuvering control scheme with prescribed performance for a class of random Euler–Lagrange systems with unmeasurable velocity and actuator faults is presented. First, an adjustable velocity observer is ingeniously constructed without additional dynamic compensation signals. Second, a projection operator is used to estimate the actuator fault factors. Based on the designed observer and projection operator, a static controller is designed to address geometric tasks with performance constraints, while a dynamic controller is developed to achieve speed allocation tasks. Finally, the effectiveness of the proposed control method is demonstrated through an illustrative example involving a two-link robotic system operating in a random environment.
Citation: Cun Yang. Output feedback maneuvering control of random Lagrange systems with actuator malfunctions[J]. Electronic Research Archive, 2025, 33(8): 4917-4932. doi: 10.3934/era.2025221
In this paper, a fault-tolerant output feedback maneuvering control scheme with prescribed performance for a class of random Euler–Lagrange systems with unmeasurable velocity and actuator faults is presented. First, an adjustable velocity observer is ingeniously constructed without additional dynamic compensation signals. Second, a projection operator is used to estimate the actuator fault factors. Based on the designed observer and projection operator, a static controller is designed to address geometric tasks with performance constraints, while a dynamic controller is developed to achieve speed allocation tasks. Finally, the effectiveness of the proposed control method is demonstrated through an illustrative example involving a two-link robotic system operating in a random environment.

| [1] |
Y. M. Zhang, J. Jiang, Bibliographical review on reconfigurable fault-tolerant control systems, Annu. Rev. Control, 32 (2008), 229–252. https://doi:10.1016/j.arcontrol.2008.03.008 doi: 10.1016/j.arcontrol.2008.03.008

|
| [2] | Q. K. Shen, B. Jiang, P. Shi, Fault Diagnosis and Fault-Tolerant Control Based on Adaptive Control Approach, Switzerland: Springer, 2017. https://doi.org/10.1007/978-3-319-52530-3 |
| [3] |
S. Barghandan, M. A. Badamchizadeh, M. R. Jahed-Motlagh, Improved adaptive fuzzy sliding mode controller for robust fault tolerant of a quadrotor, Int. J. Control Autom. Syst., 15 (2017), 427–441. http://dx.doi.org/10.1007/s12555-015-0313-7 doi: 10.1007/s12555-015-0313-7
|
| [4] |
B. Huang, S. Zhang, Y. S. He, B. Wang, Z. C. Deng, Finite-time anti-saturation control for Euler–Lagrange systems with actuator failures, ISA Trans., 124 (2020), 468–477. https://doi.org/10.1016/j.isatra.2020.08.028 doi: 10.1016/j.isatra.2020.08.028
|
| [5] |
K. Yan, M. Chen, Q. X. Wu, Neural network-based adaptive fault tolerant tracking control for unmanned autonomous helicopters with prescribed performance, Proc. Inst. Mech. Eng., Part G: J. Aerosp. Eng., 233 (2019), 4350–4362. https://doi.org/10.1177/0954410018823364 doi: 10.1177/0954410018823364
|
| [6] |
K. X. Guo, S. K. Lyu, X. Yu, J. Z. Qiao, L. Guo, Y. M. Zhang, Fault-tolerant control design for a class of nonlinear systems with actuator malfunctions, Int. J. Robust Nonlinear Control, 32 (2022), 2828–2844. https://doi.org/10.1002/rnc.5752 doi: 10.1002/rnc.5752
|
| [7] |
G. Heredia, A. Ollero, Detection of sensor faults in small helicopter UAVs using observer/kalman filter identification, Math. Probl. Eng., 2011 (2011), 174618. https://doi.org/10.1155/2011/174618 doi: 10.1155/2011/174618
|
| [8] |
M. S. Qian, B. Jiang, D. Z. Xu, Fault tolerant tracking control schem for UAV using dynamic surface control technique, Circ. Syst. Signal Process., 31 (2012), 1713–1729. https://doi.org/10.1007/s00034-012-9402-5 doi: 10.1007/s00034-012-9402-5
|
| [9] |
J. X. Zhang, G. H. Yang, Robust adaptive fault-tolerant control for a class of unknown nonlinear systems, IEEE Trans. Ind. Electron., 64 (2017), 585–594. https://doi.org/10.1109/TIE.2016.2595481 doi: 10.1109/TIE.2016.2595481
|
| [10] |
Y. X. Li, Finite time command filtered adaptive fault tolerant control for a class of uncertain nonlinear systems, Automatica, 106 (2019), 117–123. https://doi.org/10.1016/j.automatica.2019.04.022 doi: 10.1016/j.automatica.2019.04.022
|
| [11] |
Y. Liu, X. Q. Yao, W. Zhao, Distributed neural-based fault-tolerant control of multiple flexible manipulators with input saturations, Automatica, 156 (2023), 111202. https://doi.org/10.1016/j.automatica.2023.111202 doi: 10.1016/j.automatica.2023.111202
|
| [12] |
J. X. Zhang, G. H. Yang, Fault-tolerant output-constrained control of unknown Euler-Lagrange systems with prescribed tracking accuracy, Automatica, 111 (2020), 108606. https://doi.org/10.1016/j.automatica.2019.108606 doi: 10.1016/j.automatica.2019.108606
|
| [13] |
R. Ortega, A. Loria, R. Kelly, A semiglobally stable output feedback PID regulator for robot manipulators, IEEE Trans. Autom. Control, 40 (1995), 1432–1436. https://doi.org/10.1109/9.402235 doi: 10.1109/9.402235
|
| [14] |
S. Islam, P. X. Liu, Output feedback sliding mode control for robot manipulators, Robotica, 28 (2010), 975–987. https://doi.org/10.1017/S0263574709990816 doi: 10.1017/S0263574709990816
|
| [15] |
Ø. N. Stamnes, O. M. Aamo, G. O. Kaasa, A constructive speed observer design for general Euler-Lagrange systems, Automatica, 47 (2011), 2233–2238. https://doi.org/10.1016/j.automatica.2011.08.006 doi: 10.1016/j.automatica.2011.08.006
|
| [16] |
M. Y. Cui, Z. J. Wu, X. J. Xie, Output feedback tracking control of stochastic Lagrangian systems and its application, Automatica, 50 (2014), 1424–1433. http://dx.doi.org/10.1016/j.automatica.2014.03.001 doi: 10.1016/j.automatica.2014.03.001
|
| [17] |
R. Skjetne, T. I. Fossen, P. V. Kokotović, Robust output maneuvering for a class of nonlinear systems, Automatica, 40 (2004), 373–383. https://doi.org/10.1016/j.automatica.2003.10.010 doi: 10.1016/j.automatica.2003.10.010
|
| [18] |
R. Skjetne, T. I. Fossen, P. V. Kokotović, Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory, Automatica, 41 (2005), 289–298. https://doi.org/10.1016/j.automatica.2004.10.006 doi: 10.1016/j.automatica.2004.10.006
|
| [19] |
Z. H. Peng, D. Wang, T. S. Li, M. Han, Output-feedback cooperative formation maneuvering of autonomous surface vehicles with connectivity preservation and collision avoidance, IEEE Trans. Syst. Man Cybern., 50 (2019), 2527–2535. https://doi.org/10.1109/TCYB.2019.2914717 doi: 10.1109/TCYB.2019.2914717
|
| [20] |
Z. W. Zheng, Moving path following control for a surface vessel with error constraint, Automatica, 118 (2020), 109040. https://doi.org/10.1016/j.automatica.2020.109040 doi: 10.1016/j.automatica.2020.109040
|
| [21] |
S. L. Zhao, X. K. Wang, H. Chen, Y. J. Wang, Cooperative path following control of fixed-wing unmanned aerial vehicles with collision avoidance, J. Intell. Robot. Syst., 100 (2020), 1569–1581. https://doi.org/10.1007/s10846-020-01210-3 doi: 10.1007/s10846-020-01210-3
|
| [22] |
S. Z. Wu, X. Liang, Y. C. Fang, W. He, Geometric maneuvering for underactuated VTOL vehicles, IEEE Trans. Autom. Control, 69 (2024), 1507–1519. https://doi.org/10.1109/TAC.2023.3324268 doi: 10.1109/TAC.2023.3324268
|
| [23] |
Q. L. Hu, X. D. Shao, L. Guo, Adaptive fault-tolerant attitude tracking control of spacecraft with prescribed performance, IEEE/ASME Trans. Mechatron., 23 (2018), 331–341. https://doi.org/10.1109/TMECH.2017.2775626 doi: 10.1109/TMECH.2017.2775626
|
| [24] |
J. Li, J. Y. Li, Z. J. Wu, Y. G. Liu, Practical tracking control with prescribed transient performance for Euler-Lagrange equation, J. Franklin Inst., 357 (2020), 5809–5830. https://doi.org/10.1016/j.jfranklin.2020.03.017 doi: 10.1016/j.jfranklin.2020.03.017
|
| [25] |
C. C. Wang, G. H. Yang, Observer-based adaptive prescribed performance tracking control for nonlinear systems with unknown control direction and input saturation, Neurocomputing, 284 (2018), 17–26. https://doi.org/10.1016/j.neucom.2018.01.023 doi: 10.1016/j.neucom.2018.01.023
|
| [26] |
X. D. Shao, Q. L. Hu, Y. Shi, B. Y. Jiang, Fault-tolerant prescribed performance attitude tracking control for spacecraft under input saturation, IEEE Trans. Control Syst. Technol., 28 (2018), 574–582. https://doi.org/10.1109/TCST.2018.2875426 doi: 10.1109/TCST.2018.2875426
|
| [27] |
Z. W. Zheng, M. Feroskhan, Path following of a surface vessel with prescribed performance in the presence of input saturation and external disturbances, IEEE/ASME Trans. Mechatron., 22 (2017), 2564–2575. https://doi.org/10.1109/TMECH.2017.2756110 doi: 10.1109/TMECH.2017.2756110
|
| [28] |
R. P. Xi, H. G. Zhang, Y. F. Mu, J. Zhang, Command filtered tracking control for random nonlinear systems with actuator faults, IEEE Trans. Circuits Syst. II Express Briefs, 70 (2022), 221–225. https://doi.org/10.1109/TCSII.2022.3195934 doi: 10.1109/TCSII.2022.3195934
|
| [29] |
M. Y. Cui, C. Yang, Z. J. Wu, Global trajectory tracking of a class of manipulators without velocity measurements in random surroundings, Int. J. Control, 95 (2022), 3127–3136. https://doi.org/10.1080/00207179.2021.1957154 doi: 10.1080/00207179.2021.1957154
|
| [30] |
X. H. Yu, T. Wang, J. B. Qiu, H. J. Gao, Barrier lyapunov function-based adaptive fault-tolerant control for a class of strict-feedback stochastic nonlinear systems. IEEE Trans. Cybern., 51 (2019), 938–946. https://doi.org/10.1109/TCYB.2019.2941367 doi: 10.1109/TCYB.2019.2941367
|
| [31] |
W. Sun, S. F. Su, J. W. Xia, G. M. Zhuang, Command filter-based adaptive prescribed performance tracking control for stochastic uncertain nonlinear systems, IEEE Trans. Syst. Man Cybern. Syst., 50 (2020), 6555–6563. https://doi.org/10.1109/TSMC.2019.2963220 doi: 10.1109/TSMC.2019.2963220
|
| [32] |
K. Yan, M. Chen, B. Jiang, Q. X. Wu, Robust adaptive active fault-tolerant control of uah with unknown disturbances and actuator faults, Int. J. Adapt. Control Signal Process., 33 (2019), 684–711. https://doi.org/10.1002/acs.2979 doi: 10.1002/acs.2979
|
| [33] |
D. Swaroop, J. K. Hedrick, P. P. Yip, J. C. Gerdes, Dynamic surface control for a class of nonlinear systems, IEEE Trans. Autom. Control, 45 (2000), 1893–1899. https://doi.org/10.1109/TAC.2000.880994 doi: 10.1109/TAC.2000.880994
|
| [34] |
C. Yang, Z. J. Wu, L. K. Feng, Semi-global practical stability of random systems and its application, J. Syst. Sci. Complexity, 36 (2023), 2398–2414. https://doi.org/10.1007/s11424-023-2463-7 doi: 10.1007/s11424-023-2463-7
|
Figures(7)
Cun Yang. Output feedback maneuvering control of random Lagrange systems with actuator malfunctions[J]. Electronic Research Archive, 2025, 33(8): 4917-4932. doi: 10.3934/era.2025221







 DownLoad:
DownLoad: