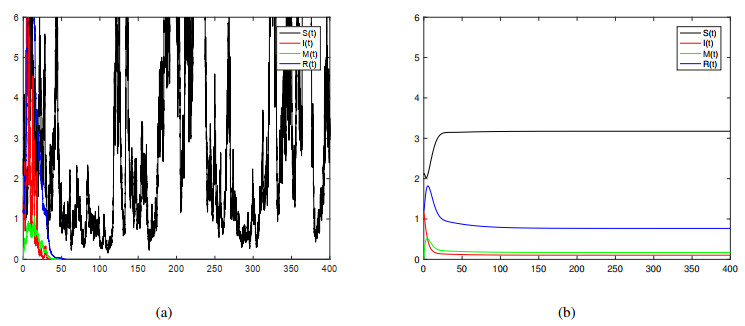
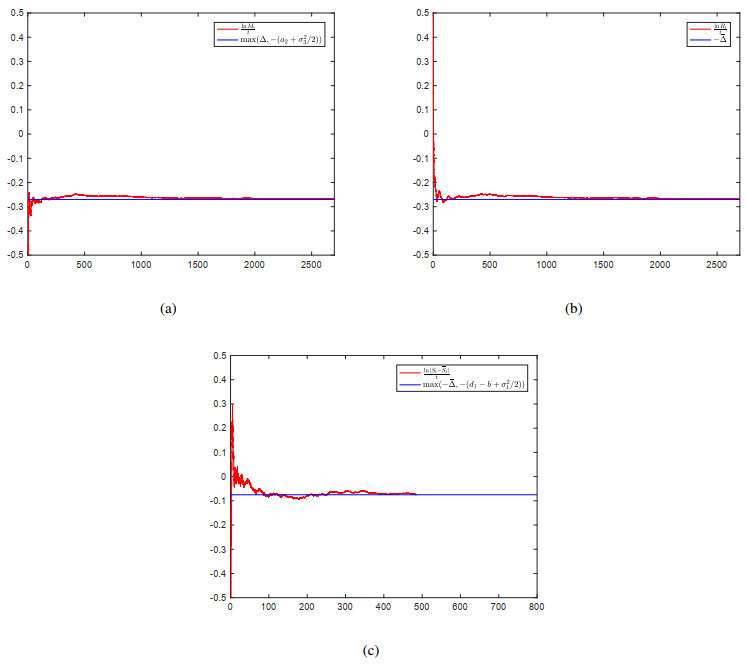
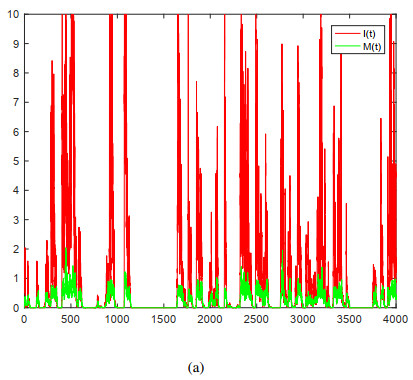
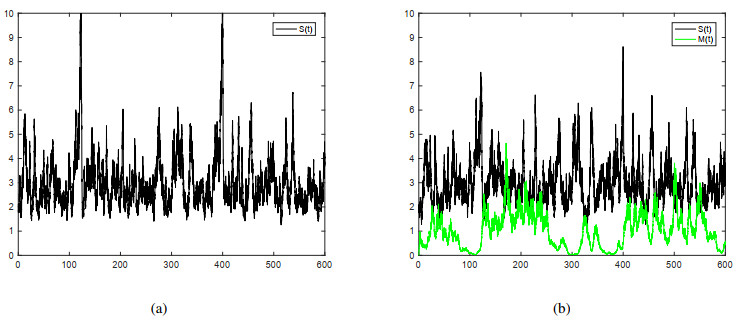
The dynamic behavior of a stochastic epidemic model with information intervention and vertical transmission was the concern of this paper. The threshold to judge the extinction and persistence of the disease was obtained. Specifically, when $ \Delta < 0 $ ($ \Delta $ appears in Section 3), the three classes $ I_t $, $ M_t $, and $ R_t $ appearing in the model go extinct at an exponential rate, and the susceptible class $ S_t $ almost surely converges to the solution of the boundary equation exponentially. When $ \Delta > 0 $, the result that the disease in the model is persistent in the mean and the existence of invariant probability measure are proved by constructing a new form of Lyapunov functions, which results in getting sufficient and nearly necessary conditions for different properties. Moreover, one of the main characteristics of this article was the study of the critical case of $ \Delta = 0 $ under some conditions. Some examples were listed to confirm the obtained results.
Citation: Feng Wang, Taotao Li. Dynamics of a stochastic epidemic model with information intervention and vertical transmission[J]. Electronic Research Archive, 2024, 32(6): 3700-3727. doi: 10.3934/era.2024168
The dynamic behavior of a stochastic epidemic model with information intervention and vertical transmission was the concern of this paper. The threshold to judge the extinction and persistence of the disease was obtained. Specifically, when $ \Delta < 0 $ ($ \Delta $ appears in Section 3), the three classes $ I_t $, $ M_t $, and $ R_t $ appearing in the model go extinct at an exponential rate, and the susceptible class $ S_t $ almost surely converges to the solution of the boundary equation exponentially. When $ \Delta > 0 $, the result that the disease in the model is persistent in the mean and the existence of invariant probability measure are proved by constructing a new form of Lyapunov functions, which results in getting sufficient and nearly necessary conditions for different properties. Moreover, one of the main characteristics of this article was the study of the critical case of $ \Delta = 0 $ under some conditions. Some examples were listed to confirm the obtained results.

| [1] |
F. A. C. Chalub, M. O. Souza, The SIR epidemic model from a PDE point of view, Math. Comput. Modell., 53 (2011), 1568–1574. https://doi.org/10.1016/j.mcm.2010.05.036 doi: 10.1016/j.mcm.2010.05.036

|
| [2] |
M. D. la Sen, S. Alonso-Quesada, A. Ibeas, On the stability of an SEIR epidemic model with distributed time-delay and a general class of feedback vaccination rules, Appl. Math. Comput., 270 (2015), 953–976. https://doi.org/10.1016/j.amc.2015.08.099 doi: 10.1016/j.amc.2015.08.099
|
| [3] |
A. E. Koufi, A. Bennar, N. Yousfi, M. Pitchaimani, Threshold dynamics for a class of stochastic SIRS epidemic models with nonlinear incidence and Markovian switching, Math. Modell. Nat. Pheno., 16 (2021), 55. https://doi.org/10.1051/mmnp/2021047 doi: 10.1051/mmnp/2021047
|
| [4] |
N. T. Dieu, Asymptotic properties of a stochastic SIR epidemic model with Beddington-DeAngelis incidence rate, J. Dyn. Differ. Equations, 30 (2018), 93–106. https://doi.org/10.1007/s10884-016-9532-8 doi: 10.1007/s10884-016-9532-8
|
| [5] |
F. Wei, R. Xue, Stability and extinction of SEIR epidemic models with generalized nonlinear incidence, Math. Comput. Simul., 170 (2020), 1–15. https://doi.org/10.1016/j.matcom.2018.09.029 doi: 10.1016/j.matcom.2018.09.029
|
| [6] |
H. Yang, Y. Wang, S. Kundu, Z. Song, Z. Zhang, Dynamics of an SIR epidemic model incorporating time delay and convex incidence rate, Results Phys., 32 (2022), 105025. https://doi.org/10.1016/j.rinp.2021.105025 doi: 10.1016/j.rinp.2021.105025
|
| [7] |
K. Hattaf, M. Mahrouf, J. Adnani, N. Yousfi, Qualitative analysis of a stochastic epidemic model with specific functional response and temporary immunity, Physica A, 490 (2018), 591–600. https://doi.org/10.1016/j.physa.2017.08.043 doi: 10.1016/j.physa.2017.08.043
|
| [8] |
Y. Liu, J. A. Cui, The impact of media coverage on the dynamics of infectious disease, Int. J. Biomath., 1 (2008), 65–74. https://doi.org/10.1142/S1793524508000023 doi: 10.1142/S1793524508000023
|
| [9] |
Y. Zhao, L. Zhang, S. Yuan, The effect of media coverage on threshold dynamics for a stochastic SIS epidemic model, Physica A, 512 (2018), 248–260. https://doi.org/10.1016/j.physa.2018.08.113 doi: 10.1016/j.physa.2018.08.113
|
| [10] |
F. Al Basir, S. Ray, E. Venturino, Role of media coverage and delay in controlling infectious diseases: A mathematical model, Appl. Math. Comput., 337 (2018), 372–385. https://doi.org/10.1016/j.amc.2018.05.042 doi: 10.1016/j.amc.2018.05.042
|
| [11] |
H. Huo, S. Huang, X. Wang, H. Xiang, Optimal control of a social epidemic model with media coverage, J. Biol. Dyn., 11 (2017), 226–243. https://doi.org/10.1080/17513758.2017.1321792 doi: 10.1080/17513758.2017.1321792
|
| [12] |
B. Zhou, D. Jiang, B. Han, T. Hayat, Threshold dynamics and density function of a stochastic epidemic model with media coverage and mean-reverting Ornstein-Uhlenbeck process, Math. Comput. Simul., 196 (2022), 15–44. https://doi.org/10.1016/j.matcom.2022.01.014 doi: 10.1016/j.matcom.2022.01.014
|
| [13] |
Q. Liu, D. Jiang, T. Hayat, A. Alsaedi, B. Ahmad, Dynamical behavior of a higher order stochastically perturbed SIRI epidemic model with relapse and media coverage, Chaos, Solitons Fractals, 139 (2020), 110013. https://doi.org/10.1016/j.chaos.2020.110013 doi: 10.1016/j.chaos.2020.110013
|
| [14] |
J. Ge, L. Lin, L. Zhang, A diffusive SIS epidemic model incorporating the media coverage impact in the heterogeneous environment, Discrete Contin. Dyn. Syst. - Ser. B, 22 (2017), 2763–2776. https://doi.org/10.3934/dcdsb.2017134 doi: 10.3934/dcdsb.2017134
|
| [15] |
A. Kumar, P. K. Srivastava, Y. Takeuchi, Modeling the role of information and limited optimal treatment on disease prevalence, J. Theor. Biol., 414 (2017), 103–119. https://doi.org/10.1016/j.jtbi.2016.11.016 doi: 10.1016/j.jtbi.2016.11.016
|
| [16] |
X. Jin, J. Jia, Qualitative study of a stochastic SIRS epidemic model with information intervention, Physica A, 547 (2020), 123866. https://doi.org/10.1016/j.physa.2019.123866 doi: 10.1016/j.physa.2019.123866
|
| [17] |
T. Feng, Z. Qiu, Analysis of an epidemiological model driven by multiple noises: Ergodicity and convergence rate, J. Franklin Inst., 357 (2020), 2203–2216. https://doi.org/10.1016/j.jfranklin.2019.09.004 doi: 10.1016/j.jfranklin.2019.09.004
|
| [18] |
Y. Ding, X. Ren, C. Jiang, Q. Zhang, Periodic solution of a stochastic SIQR epidemic model incorporating media coverage, J. Appl. Anal. Comput., 10 (2020), 2439–2458. https://doi.org/10.11948/20190333 doi: 10.11948/20190333
|
| [19] |
J. Bao, J. Shao, Asymptotic behavior of SIRS models in state-dependent random environments, Nonlinear Anal. Hybrid Syst., 38 (2020), 100914. https://doi.org/10.1016/j.nahs.2020.100914 doi: 10.1016/j.nahs.2020.100914
|
| [20] |
D. Kuang, Q. Yin, J. Li, The threshold of a stochastic SIRS epidemic model with general incidence rate under regime-switching, J. Franklin Inst., 360 (2023), 13624–13647. https://doi.org/10.1016/j.jfranklin.2022.04.027 doi: 10.1016/j.jfranklin.2022.04.027
|
| [21] | X. Zhang, S. Chang, H. Huo, Dynamic behavior of a stochastic SIR epidemic model with vertical transmission, Electron. J. Differ. Equations, 2019 (2019), 1–20. |
| [22] |
X. Zhang, S. Chang, Q. Shi, H. Huo, Qualitative study of a stochastic SIS epidemic model with vertical transmission, Physica A, 505 (2018), 805–817. https://doi.org/10.1016/j.physa.2018.04.022 doi: 10.1016/j.physa.2018.04.022
|
| [23] |
Y. Chen, W. Zhao, Asymptotic behavior and threshold of a stochastic SIQS epidemic model with vertical transmission and Beddington-DeAngelis incidence, Adv. Differ. Equations, 2020 (2020), 353. https://doi.org/10.1186/s13662-020-02815-6 doi: 10.1186/s13662-020-02815-6
|
| [24] |
N. Dieu, D. Nguyen, N. Du, G. Yin, Classification of asymptotic behavior in a stochastic SIR model, SIAM J. Appl. Dyn. Syst., 15 (2016), 1062–1084. https://doi.org/10.1137/15M1043315 doi: 10.1137/15M1043315
|
| [25] | X. Mao, Stochastic Differential Equations and Applications, Elsevier, 2007. |
| [26] |
N. T. Dieu, V. H. Sam, N. H. Du, Threshold of a stochastic SIQS epidemic model with isolation, Discrete Contin. Dyn. Syst. - Ser. B, 27 (2022), 5009–5028. https://doi.org/10.3934/dcdsb.2021262 doi: 10.3934/dcdsb.2021262
|
| [27] |
C. Zhu, G. Yin, Asymptotic properties of hybrid diffusion systems, SIAM J. Control Optim., 46 (2007), 1155–1179. https://doi.org/10.1137/060649343 doi: 10.1137/060649343
|
| [28] |
Y. Zhao, D. Jiang, The threshold of a stochastic SIS epidemic model with vaccination, Appl. Math. Comput., 243 (2014), 718–727. https://doi.org/10.1016/j.amc.2014.05.124 doi: 10.1016/j.amc.2014.05.124
|
| [29] |
D. H. Nguyen, G. Yin, C. Zhu, Long-term analysis of a stochastic SIRS model with general incidence rates, SIAM J. Appl. Math., 80 (2020), 814–838. https://doi.org/10.1137/19M1246973 doi: 10.1137/19M1246973
|
| [30] | L. Stettner, On the Existence and Uniqueness of Invariant Measure for Continuous Time Markov Processes, Brown University, 1986. http://doi.org/10.21236/ADA174758 |
Figures(5) / Tables(1)
Feng Wang, Taotao Li. Dynamics of a stochastic epidemic model with information intervention and vertical transmission[J]. Electronic Research Archive, 2024, 32(6): 3700-3727. doi: 10.3934/era.2024168







 DownLoad:
DownLoad: