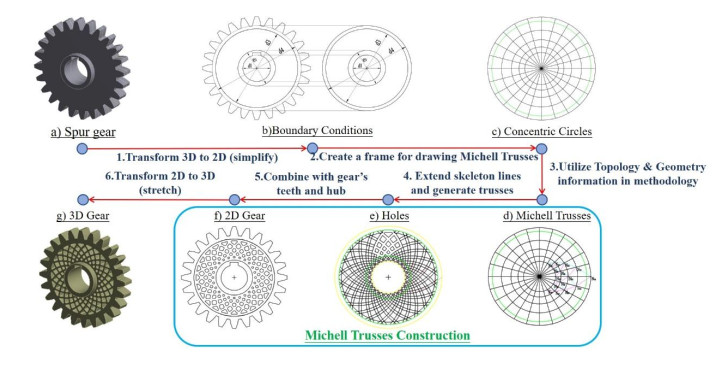
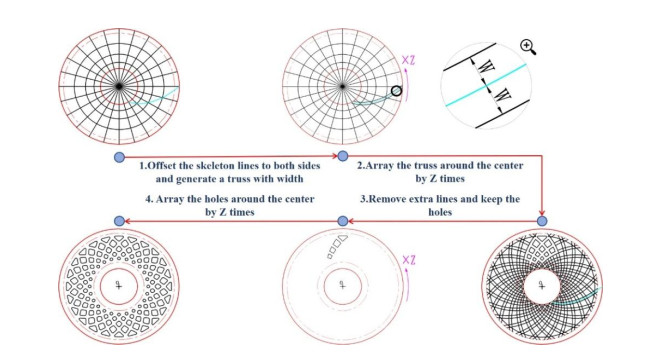
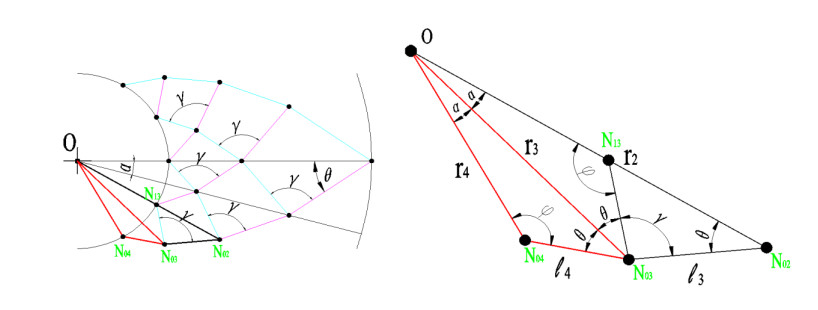
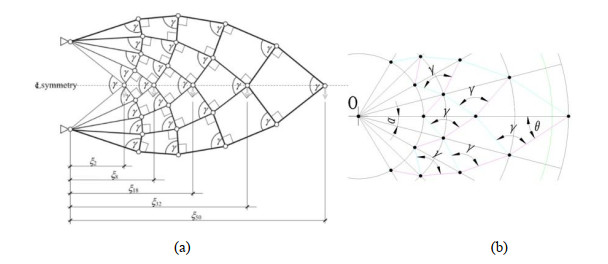
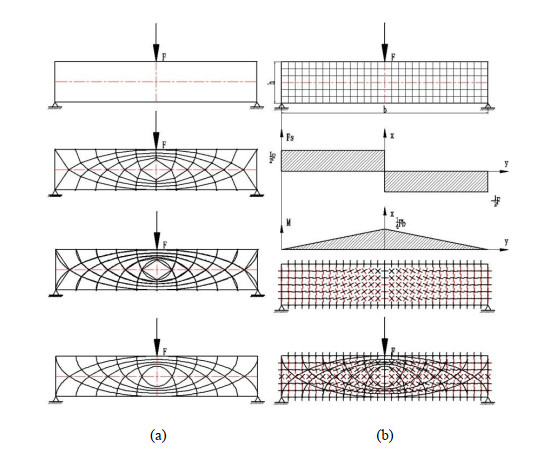
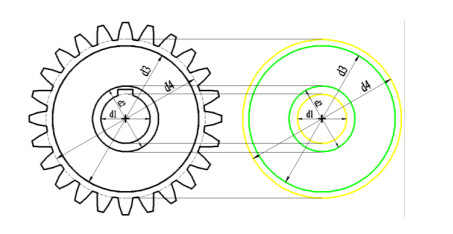
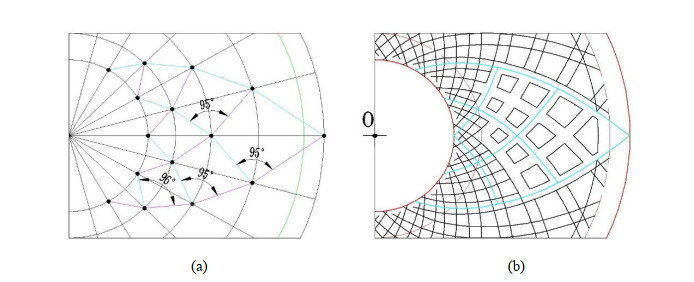
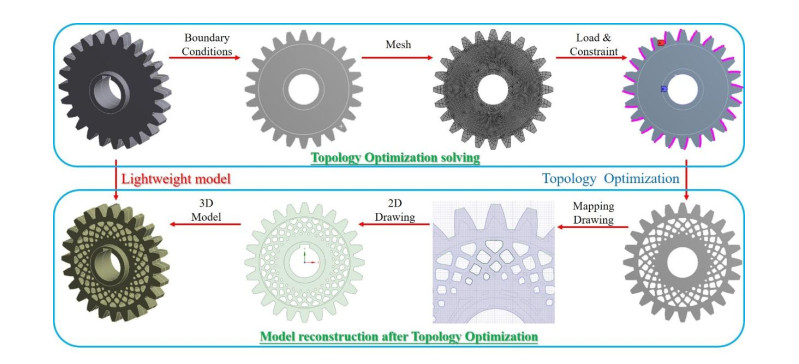
A new method for lightweight gear design based on Michell Trusses Design method was investigated in this research to compare with the traditional Topology Optimization method. A workflow with detailed steps was established using example of constructing Michell Trusses to make lightening holes at the gear's web. In this workflow, Michell Trusses are generated from a set of concentric circles. By solving the equation with the variables of concentric circles (complexity), the optimal orthogonality of trusses can be determined. Real experiments were conducted to compare the two design methods in the aspects of design costs and product mechanical property, including recording the time consumed in each link and detecting the force of failure of gears by a testing platform. The results indicate that this new method can significantly reduce design time while maintain the same power-to-weight ratio as the Topology Optimization design, which potentially provide a new research direction for lightweight structural modeling in mechanical engineering and aviation industry. The experimental product developed in this research demonstrated the promising prospects for real world applications.
Citation: Ganjun Xu, Ning Dai. Michell truss design for lightweight gear bodies[J]. Mathematical Biosciences and Engineering, 2021, 18(2): 1653-1669. doi: 10.3934/mbe.2021085
A new method for lightweight gear design based on Michell Trusses Design method was investigated in this research to compare with the traditional Topology Optimization method. A workflow with detailed steps was established using example of constructing Michell Trusses to make lightening holes at the gear's web. In this workflow, Michell Trusses are generated from a set of concentric circles. By solving the equation with the variables of concentric circles (complexity), the optimal orthogonality of trusses can be determined. Real experiments were conducted to compare the two design methods in the aspects of design costs and product mechanical property, including recording the time consumed in each link and detecting the force of failure of gears by a testing platform. The results indicate that this new method can significantly reduce design time while maintain the same power-to-weight ratio as the Topology Optimization design, which potentially provide a new research direction for lightweight structural modeling in mechanical engineering and aviation industry. The experimental product developed in this research demonstrated the promising prospects for real world applications.

| [1] | W. Zhang, J. Zhu, T. Gao, Basic formulation of topology optimization, in Topology Optimization in Engineering Structure Design, ISTE Press, (2016), 1–9. |
| [2] |
W. Chen, N. Dai, J. Wang, H. Liu, D. Li, L. Liu, Personalized design of functional gradient bone tissue engineering scaffold, J. Biomech. Eng., 141 (2019), 111004. doi: 10.1115/1.4043559

|
| [3] | T. Lewiński, T. Sokół, C. Graczykowski, Selected classes of spatial Michell's structures, in Michell Structures, Springer, (2019), 409–432. |
| [4] | J. Deaton, D. Ramana, V. Grandhi, A survey of structural and multidisciplinary continuum topology optimization: post 2000, Struct. Multidiscip. Optim., 49 (2013), 1–38. |
| [5] |
L. Stromberg, A. Beghini, W. Baker, G. Paulino, Topology optimization for braced frames: Combining continuum and beam/column elements, Eng. Struct., 37 (2012), 106–124. doi: 10.1016/j.engstruct.2011.12.034
|
| [6] | M. Biedermann, M. Meboldt, Computational design synthesis of additive manufactured multi-flow nozzles, Addit. Manuf., 35 (2020), 101231. |
| [7] |
J. Liu, A. T. Gaynor, S. Chen, Z. Kang, K. Suresh, A. Takezawa, et al., Current and future trends in topology optimization for additive manufacturing, Struct. Multidiscip. Optim., 57 (2018), 2457–2483. doi: 10.1007/s00158-018-1994-3
|
| [8] |
T. H. Kwok, Y. Li, Y. Chen, A structural topology design method based on principal stress line, Comput. Aided Des., 80 (2016) 19–31. doi: 10.1016/j.cad.2016.07.005
|
| [9] | L. Krog, A. Tucker, G. Rollema, Application of topology, sizing and shape optimization methods to optimal design of aircraft components, Airbus UK, Altair Engineering, 2002. |
| [10] |
J. Zhu, W. Zhang, L. Xia, Topology optimization in aircraft and aerospace structures design, Arch. Comput. Methods Eng., 23 (2016), 595–622. doi: 10.1007/s11831-015-9151-2
|
| [11] | S. Bi, J. Zhang, G. Zhang, Scalable deep-learning-accelerated topology optimization for additively manufactured materials, preprint, arXiv: 2011.14177. |
| [12] |
A. Niels, A. Erik, S. Boyan, S. Ole, Giga-voxel computational morphogenesis for structural design, Nature, 550 (2017), 84-86. doi: 10.1038/nature23911
|
| [13] |
A. Joe, S. Ole, A. Niels, Large scale three-dimensional topology optimisation of heat sinks cooled by natural convection, Int. J. Heat Mass Tran., 100 (2016), 876–891. doi: 10.1016/j.ijheatmasstransfer.2016.05.013
|
| [14] |
E. Anton, J. Cory, M. Kurt, L. Martin, Large-scale parallel topology optimization using a dual-primal substructuring solver, Struct. Multidiscip. Optim., 36 (2008), 329–345. doi: 10.1007/s00158-007-0190-7
|
| [15] |
J. Zhang, B. Wang, F. Niu, G. Cheng, Design optimization of connection section for concentrated force diffusion, Mech. Based Des. Struct., 43 (2015), 209–231. doi: 10.1080/15397734.2014.942816
|
| [16] |
D. Gao, On topology optimization and canonical duality method, Comput. Method Appl. M, 341 (2018), 249–277. doi: 10.1016/j.cma.2018.06.027
|
| [17] |
K. Zhou, X. Li, Topology optimization of truss-like continua with three families of members model under stress constraints, Struct. Multidiscip. Optim., 43 (2011), 487–493. doi: 10.1007/s00158-010-0584-9
|
| [18] | R. Handschuh, G. Roberts, R. Sinnamon, D. Stringer, B. Dykas, L. Kohlman, Hybrid gear preliminary results-application of composites to dynamic mechanical components, NASA TM, (2012), 217630. |
| [19] |
R. Ramadani, A. Belsak, M. Kegl, J. Predan, S. Pehan, Topology optimization based design of lightweight and low vibration gear bodies, Int. J. Simul. Model., 17 (2018), 92–104. doi: 10.2507/IJSIMM17(1)419
|
| [20] | A. Mazurek, W. Baker, C. Tort, Geometrical aspects of optimum truss like structures, Struct. Multidiscip. Optim., 43 (2010), 231–242. |
| [21] | R. E. Skelton, M. C. de Oliveira, Optimal tensegrity structures in bending: The discrete Michell truss, J. Franklin Inst., 347 (2010), 257–283. |
| [22] | K. Tam, C. Mueller, Stress line generation for structurally performative architectural design, ACADIA 2015: Comput. Ecologies, 2015. |
Figures(15) / Tables(5)

Ganjun Xu, Ning Dai. Michell truss design for lightweight gear bodies[J]. Mathematical Biosciences and Engineering, 2021, 18(2): 1653-1669. doi: 10.3934/mbe.2021085







 DownLoad:
DownLoad: