Without vaccines and medicine, non-pharmaceutical interventions (NPIs) such as social distancing, have been the main strategy in controlling the spread of COVID-19. Strict social distancing policies may lead to heavy economic losses, while relaxed social distancing policies can threaten public health systems. We formulate optimization problems that minimize the stringency of NPIs during the prevaccination and vaccination phases and guarantee that cases requiring hospitalization will not exceed the number of available hospital beds. The approach utilizes an SEIQR model that separates mild from severe cases and includes a parameter $ \mu $ that quantifies NPIs. Payoff constraints ensure that daily cases are decreasing at the end of the prevaccination phase and cases are minimal at the end of the vaccination phase. Using a penalty method, the constrained minimization is transformed into a non-convex, multi-modal unconstrained optimization problem. We solve this problem using the improved multi-operator differential evolution, which fared well when compared with other optimization algorithms. We apply the framework to determine optimal social distancing strategies in the Republic of Korea given different amounts and types of antiviral drugs. The model considers variants, booster shots, and waning of immunity. The optimal $ \mu $ values show that fast administration of vaccines is as important as using highly effective vaccines. The initial number of infections and daily imported cases should be kept minimum especially if the bed capacity is low. In Korea, a gradual easing of NPIs without exceeding the bed capacity is possible if there are at least seven million antiviral drugs and the effectiveness of the drug in reducing severity is at least 86%. Model parameters can be adapted to a specific region or country, or other infectious diseases. The framework can be used as a decision support tool in planning economic policies, especially in countries with limited healthcare resources.
Citation: Victoria May P. Mendoza, Renier Mendoza, Jongmin Lee, Eunok Jung. Adjusting non-pharmaceutical interventions based on hospital bed capacity using a multi-operator differential evolution[J]. AIMS Mathematics, 2022, 7(11): 19922-19953. doi: 10.3934/math.20221091
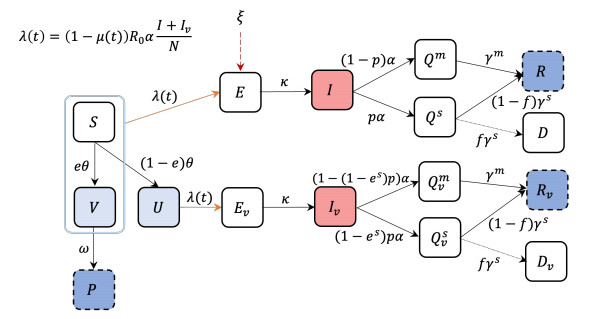
Without vaccines and medicine, non-pharmaceutical interventions (NPIs) such as social distancing, have been the main strategy in controlling the spread of COVID-19. Strict social distancing policies may lead to heavy economic losses, while relaxed social distancing policies can threaten public health systems. We formulate optimization problems that minimize the stringency of NPIs during the prevaccination and vaccination phases and guarantee that cases requiring hospitalization will not exceed the number of available hospital beds. The approach utilizes an SEIQR model that separates mild from severe cases and includes a parameter $ \mu $ that quantifies NPIs. Payoff constraints ensure that daily cases are decreasing at the end of the prevaccination phase and cases are minimal at the end of the vaccination phase. Using a penalty method, the constrained minimization is transformed into a non-convex, multi-modal unconstrained optimization problem. We solve this problem using the improved multi-operator differential evolution, which fared well when compared with other optimization algorithms. We apply the framework to determine optimal social distancing strategies in the Republic of Korea given different amounts and types of antiviral drugs. The model considers variants, booster shots, and waning of immunity. The optimal $ \mu $ values show that fast administration of vaccines is as important as using highly effective vaccines. The initial number of infections and daily imported cases should be kept minimum especially if the bed capacity is low. In Korea, a gradual easing of NPIs without exceeding the bed capacity is possible if there are at least seven million antiviral drugs and the effectiveness of the drug in reducing severity is at least 86%. Model parameters can be adapted to a specific region or country, or other infectious diseases. The framework can be used as a decision support tool in planning economic policies, especially in countries with limited healthcare resources.

| [1] |
N. Haider, A. Y. Osman, A. Gadzekpo, G. O. Akipede, D. Asogun, R. Ansumana, et al., Lockdown measures in response to COVID-19 in nine sub-Saharan African countries, BMJ Glob. Health, 5 (2020), e003319. http://dx.doi.org/10.1136/bmjgh-2020-003319 doi: 10.1136/bmjgh-2020-003319

|
| [2] |
J. Cohen, K. Kupferschmidt, Countries test tactics in 'war'against COVID-19, Science, 367 (2020), 1287–1288. http://dx.doi.org/10.1126/science.367.6484.1287 doi: 10.1126/science.367.6484.1287
|
| [3] |
T. P. B. Thu, P. N. H. Ngoc, N. M. Hai, Effect of the social distancing measures on the spread of COVID-19 in 10 highly infected countries, Sci. Total. Environ., 742 (2020), 140430. http://dx.doi.org/10.1016/j.scitotenv.2020.140430 doi: 10.1016/j.scitotenv.2020.140430
|
| [4] |
N. Lu, K. W. Cheng, N. Qamar, K. C. Huang, J. A. Johnson, Weathering COVID-19 storm: Successful control measures of five Asian countries, Am. J. Infect. Control, 48 (2020), 851–852. http://dx.doi.org/10.1016/j.ajic.2020.04.021 doi: 10.1016/j.ajic.2020.04.021
|
| [5] |
P. Deb, D. Furceri, J. D. Ostry, N. Tawk, The economic effects of COVID-19 containment measures, Open Econ. Rev., 33 (2022), 1–32. http://dx.doi.org/10.1007/s11079-021-09638-2 doi: 10.1007/s11079-021-09638-2
|
| [6] | A. Demirgüç-Kunt, M. Lokshin, I. Torre, The sooner, the better: The early economic impact of non-pharmaceutical interventions during the COVID-19 pandemic, Policy Research Working Paper, World Bank, Washington, DC, 9257 (2020). https://openknowledge.worldbank.org/handle/10986/33820 |
| [7] |
C. Stokel-Walker, What do we know about covid vaccines and preventing transmission?, BMJ, 376 (2022), o298. http://dx.doi.org/10.1136/bmj.o298 doi: 10.1136/bmj.o298
|
| [8] |
S. Guerstein, V. Romeo-Aznar, M. Dekel, O. Miron, N. Davidovitch, R. Puzis, et al., The interplay between vaccination and social distancing strategies affects COVID-19 population-level outcomes, PLoS Comput. Biol., 17 (2021), e1009319. http://dx.doi.org/10.1371/journal.pcbi.1009319 doi: 10.1371/journal.pcbi.1009319
|
| [9] |
M. Dashtbali, M. Mirzaie, A compartmental model that predicts the effect of social distancing and vaccination on controlling COVID-19, Sci. Rep., 11 (2021), 1–11. http://dx.doi.org/10.1038/s41598-021-86873-0 doi: 10.1038/s41598-021-86873-0
|
| [10] |
M. F. Good, M. T. Hawkes, The interaction of natural and vaccine-induced immunity with social distancing predicts the evolution of the COVID-19 pandemic, mBio., 11 (2020), e02617–20. http://dx.doi.org/10.1128/mBio.02617-20 doi: 10.1128/mBio.02617-20
|
| [11] |
M. J. Keeling, E. M. Hill, E. E. Gorsich, B. Penman, G. Guyver-Fletcher, A. Holmes, et al., Predictions of COVID-19 dynamics in the UK: Short-term forecasting and analysis of potential exit strategies, PLoS Comput. Biol., 17 (2021), e1008619. http://dx.doi.org/10.1371/journal.pcbi.1008619 doi: 10.1371/journal.pcbi.1008619
|
| [12] |
R. Chowdhury, K. Heng, M. S. R. Shawon, G. Goh, D. Okonofua, C. Ochoa-Rosales, et al., Dynamic interventions to control COVID-19 pandemic: A multivariate prediction modelling study comparing 16 worldwide countries, Eur. J. Epidemiol., 35 (2020), 389–399. http://dx.doi.org/10.1007/s10654-020-00649-w doi: 10.1007/s10654-020-00649-w
|
| [13] |
T. Oraby, M. G. Tyshenko, J. C. Maldonado, K. Vatcheva, S. Elsaadany, W. Q. Alali, et al., Modeling the effect of lockdown timing as a COVID-19 control measure in countries with differing social contacts, Sci. Rep., 11 (2021), 1–13. http://dx.doi.org/10.1038/s41598-021-82873-2 doi: 10.1038/s41598-021-82873-2
|
| [14] |
I. U. Haq, N. Ali, H. Ahmad, T. A. Nofal, On the fractional-order mathematical model of COVID-19 with the effects of multiple non-pharmaceutical interventions, AIMS Math., 7 (2022), 16017–16036. http://dx.doi.org/10.3934/math.2022877 doi: 10.3934/math.2022877
|
| [15] | K. M. Sallam, S. M. Elsayed, R. K. Chakrabortty, M. J. Ryan, Improved multi-operator differential evolution algorithm for solving unconstrained problems, 2020 IEEE Congress on Evolutionary Computation (CEC), (2020), 1–8. http://dx.doi.org/10.1109/CEC48606.2020.9185577 |
| [16] |
N. Gozzi, P. Bajardi, N. Perra, The importance of non-pharmaceutical interventions during the COVID-19 vaccine rollout, PLoS Comput. Biol., 17 (2021), e1009346. http://dx.doi.org/10.1371/journal.pcbi.1009346 doi: 10.1371/journal.pcbi.1009346
|
| [17] |
J. Pan, W. Zhu, J. Tian, Z. Liu, A. Xu, Y. Yao, et al., Vaccination as an alternative to non-drug interventions to prevent local resurgence of COVID-19, Infect. Dis. Poverty, 11 (2022), 1–13. http://dx.doi.org/10.1186/s40249-022-00960-6 doi: 10.1186/s40249-022-00960-6
|
| [18] |
I. M. Batiha, A. A. Al-Nana, R. B. Albadarneh, A. Ouannas, A. Al-Khasawneh, S. Momani, Fractional-order coronavirus models with vaccination strategies impacted on Saudi Arabia's infections, AIMS Math., 7 (2022), 12842–12858. http://dx.doi.org/10.3934/math.2022711 doi: 10.3934/math.2022711
|
| [19] | J. Lee, R. Mendoza, V. M. P. Mendoza, Y. Ko, J. Lee, Y. Seo, et al., Modelling the effects of social distancing, antiviral therapy, and booster shots on mitigating omicron spread, preprint (Version 1) available at Research Square, (09 February 2022). http://dx.doi.org/10.21203/rs.3.rs-1322738/v1 |
| [20] |
Y. Alimohamadi, M. Taghdir, M. Sepandi, Estimate of the basic reproduction number for COVID-19: A systematic review and meta-analysis, J. Prev. Med. Public Health, 53 (2020), 151–157. http://dx.doi.org/10.3961/jpmph.20.076 doi: 10.3961/jpmph.20.076
|
| [21] |
Y. Liu, A. A. Gayle, A. Wilder-Smith, J. Rocklöv, The reproductive number of COVID-19 is higher compared to SARS coronavirus, J. Travel Med., 27 (2020), 1–4. http://dx.doi.org/10.1093/jtm/taaa021 doi: 10.1093/jtm/taaa021
|
| [22] |
W. He, G. Y. Yi, Y. Zhu, Estimation of the basic reproduction number, average incubation time, asymptomatic infection rate, and case fatality rate for COVID-19: Meta-analysis and sensitivity analysis, J. Med. Virol., 92 (2020), 2543–2550. http://dx.doi.org/10.1002/jmv.26041 doi: 10.1002/jmv.26041
|
| [23] | Daily vaccination situation, Korea Disease Control and Prevention Agency (KDCA), 2021. https://ncv.kdca.go.kr/vaccineStatus.es?mid=a11710000000 |
| [24] | COVID-19 vaccine weekly surveillance report week 1, UK Health Security Agency (UKHSA), 2022. https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/1045329/Vaccine_surveillance_report_week_1_2022.pdf |
| [25] | WHO Communicable Diseases, Emergencies Preparedness, Infection Prevention and Control UHL, Mask use in the context of COVID-19: Interim Guidance, World Health Organization, 2020, 1–22. WHO/2019-nCoV/IPC_Masks/2020.5 |
| [26] |
Y. Wang, R. Chen, F. Hu, Y. Lan, Z. Yang, C. Zhan, et al., Transmission, viral kinetics and clinical characteristics of the emergent SARS-CoV-2 Delta VOC in Guangzhou, China, EClinicalMedicine, 40 (2021), 101129. http://dx.doi.org/10.1016/j.eclinm.2021.101129 doi: 10.1016/j.eclinm.2021.101129
|
| [27] | The effectiveness for severity and death of COVID-19 vaccine from May to July 2021, Korea Disease Control and Prevention Agency (KDCA), 2022. Available from: https://www.kdca.go.kr/board/board.es?mid=a20602010000&bid=0034&list_no=716913&act=view |
| [28] |
E. S. Rosenberg, V. Dorabawila, D. Easton, U. E. Bauer, J. Kumar, R. Hoen, et al., COVID-19 vaccine effectiveness in New York State, N. Engl. J. Med., 386 (2022), 116–127. http://dx.doi.org/10.1056/NEJMoa2116063 doi: 10.1056/NEJMoa2116063
|
| [29] | O. T. Ranzani, M. D. Hitchings, M. Dorion, T. L. D'Agostini, R. C. de Paula, O. F. P. de Paula, et al., Effectiveness of the CoronaVac vaccine in older adults during a gamma variant associated epidemic of covid-19 in Brazil: Test negative case-control study, BMJ, 374 (2021). http://dx.doi.org/10.1136/bmj.n2015 |
| [30] |
N. M. Lewis, E. A. Naioti, W. H. Self, A. A. Ginde, D. J. Douin, H. K. Talbot, et al., Effectiveness of mRNA vaccines in preventing COVID-19 hospitalization by age and burden of chronic medical conditions among immunocompetent US adults, March-August 2021, J. Infect. Dis., 225 (2022), 1694–1700. http://dx.doi.org/10.1093/infdis/jiab619 doi: 10.1093/infdis/jiab619
|
| [31] |
Y. H. Lee, C. M. Hong, D. H. Kim, T. H. Lee, J. Lee, Clinical course of asymptomatic and mildly symptomatic patients with coronavirus disease admitted to community treatment centers, South Korea, Emerg. Infect. Dis., 26 (2020), 2346–2352. http://dx.doi.org/10.3201/eid2610.201620 doi: 10.3201/eid2610.201620
|
| [32] | The weekly news review, Seoul Metropolitan Government, Citizen's health department, 2021. https://www.seoul.go.kr/seoulcom/fileDownload.do?fileName=corona/daily-news-review_211210_447.pdf |
| [33] |
M. Ki, Epidemiologic characteristics of early cases with 2019 novel coronavirus (2019-nCoV) disease in Korea, Epidemiol. Health, 42 (2020), e2020007. http://dx.doi.org/10.4178/epih.e2020007 doi: 10.4178/epih.e2020007
|
| [34] |
G. Di Pillo, L. Grippo, Exact penalty functions in constrained optimization, SIAM Journal on control and optimization, SIAM J. Control Optim., 27 (1989), 1333–1360. http://dx.doi.org/10.1137/0327068 doi: 10.1137/0327068
|
| [35] | Current status of COVID-19 outbreak and vaccination in Korea (4.29.), Korea Disease Control and Prevention Agency (KDCA), 2022. Available from: https://kdca.go.kr/board/board.es?mid=a20501010000&bid=0015&list_no=719429&cg_code=&act=view&nPage=9# |
| [36] | E. Mahase, Covid-19: Pfizer's paxlovid is 89% effective in patients at risk of serious illness, company reports, BMJ, 375 (2021). http://dx.doi.org/10.1136/bmj.n2713 |
| [37] |
Y. Jo, S. B. Kim, M. Radnaabaatar, K. Huh, J. H. Yoo, K. R. Peck, et al., Model-based cost-effectiveness analysis of oral antivirals against SARS-CoV-2 in Korea, Epidemiol. Health, 44 (2022), e2022034. http://dx.doi.org/10.4178/epih.e2022034 doi: 10.4178/epih.e2022034
|
| [38] |
F. Agusto, M. Leite, Optimal control and cost-effective analysis of the 2017 meningitis outbreak in Nigeria, Infect. Dis. Model, 4 (2019), 161–187. http://dx.doi.org/10.1016/j.idm.2019.05.003 doi: 10.1016/j.idm.2019.05.003
|
| [39] |
X. Zhang, Z. Zhu, C. Zhang, Multi-stage differential evolution algorithm for constrained D-optimal design, AIMS Math., 6 (2021), 2956–2969. http://dx.doi.org/10.3934/math.2021179 doi: 10.3934/math.2021179
|
| [40] |
P. Wang, J. Huang, W. He, J. Zhang, F. Guo, Maximum likelihood DOA estimation based on improved invasive weed optimization algorithm and application of MEMS vector hydrophone array, AIMS Math., 7 (2022), 12342–12363. http://dx.doi.org/10.3934/math.2022685 doi: 10.3934/math.2022685
|
| [41] |
S. Zhu, A. P. Piotrowski, M. Ptak, J. J. Napiorkowski, J. Dai, Q. Ji, How does the calibration method impact the performance of the air2water model for the forecasting of lake surface water temperatures?, J. Hydrol., 597 (2021), 126219. http://dx.doi.org/10.1016/j.jhydrol.2021.126219 doi: 10.1016/j.jhydrol.2021.126219
|
| [42] |
A. Ferrolino, R. Mendoza, I. Magdalena, J. E. Lope, Application of particle swarm optimization in optimal placement of tsunami sensors, Peer J. Comput. Sci., 6 (2020), e333. http://dx.doi.org/10.7717/peerj-cs.333 doi: 10.7717/peerj-cs.333
|
| [43] | A. C. Velasco, M. Darbas, R. Mendoza, M. Bacon, J. C. de Leon, Comparative study of heuristic algorithms for electrical impedance tomography, Philipp. J. Sci., 149 (2020), 747–772. |
| [44] |
X. Li, M. Yin, Design of a reconfigurable antenna array with discrete phase shifters using differential evolution algorithm, Prog. Electromagn. Res. B, 31 (2011), 29–43. http://dx.doi.org/10.2528/PIERB11032902 doi: 10.2528/PIERB11032902
|
| [45] | X. Li, X. Zhang, M. Yin, J. Wang, A genetic algorithm for the distributed assembly permutation flowshop scheduling problem, 2015 IEEE Congress on Evolutionary Computation (CEC), (2015), 3096–3101. http://dx.doi.org/10.1109/CEC.2015.7257275 |
| [46] |
I. M. Hezam, O. Abdul-Raof, A. Foul, F. Aqlan, A quantum-inspired sperm motility algorithm, AIMS Math., 7 (2022), 9057–9088. http://dx.doi.org/10.3934/math.2022504 doi: 10.3934/math.2022504
|
| [47] |
B. She, A. Fournier, M. Yao, Y. Wang, G. Hu, A self-adaptive and gradient-based cuckoo search algorithm for global optimization, Appl. Soft Comput., 122 (2022), 108774. http://dx.doi.org/10.1016/j.asoc.2022.108774 doi: 10.1016/j.asoc.2022.108774
|
| [48] |
E. A. T. Enriquez, R. G. Mendoza, A. C. T. Velasco, Philippine Eagle optimization algorithm, IEEE Access, 10 (2022), 29089–29120. http://dx.doi.org/10.1109/ACCESS.2022.3158357 doi: 10.1109/ACCESS.2022.3158357
|
| [49] |
X. Li, J. Wang, J. Zhou, M. Yin, A perturb biogeography based optimization with mutation for global numerical optimization, Appl. Math. Comput., 218 (2011), 598–609. http://dx.doi.org/10.1016/j.amc.2011.05.110 doi: 10.1016/j.amc.2011.05.110
|
| [50] |
X. Li, S. Ma, J. Hu, Multi-search differential evolution algorithm, Appl. Intell., 47 (2017), 231–256. http://dx.doi.org/10.1007/s10489-016-0885-9 doi: 10.1007/s10489-016-0885-9
|
| [51] |
X. Li, M. Yin, Modified cuckoo search algorithm with self adaptive parameter method, Inf. Sci., 298 (2015), 80–97. http://dx.doi.org/10.1016/j.ins.2014.11.042 doi: 10.1016/j.ins.2014.11.042
|
| [52] |
P. Yarsky, Using a genetic algorithm to fit parameters of a COVID-19 SEIR model for US states, Math. Comput. Simul., 185 (2021), 687–695. http://dx.doi.org/10.1016/j.matcom.2021.01.022 doi: 10.1016/j.matcom.2021.01.022
|
| [53] |
C. U. Jamilla, R. G. Mendoza, V. M. P. Mendoza, Parameter estimation in neutral delay differential equations using genetic algorithm with multi-parent crossover, IEEE Access, 9 (2021), 131348–131364. http://dx.doi.org/10.1109/ACCESS.2021.3113677 doi: 10.1109/ACCESS.2021.3113677
|
| [54] |
Windarto, M. A. Khan, Fatmawati, Parameter estimation and fractional derivatives of dengue transmission model, AIMS Math., 5 (2020), 2758–2779. http://dx.doi.org/10.3934/math.2020178 doi: 10.3934/math.2020178
|
| [55] |
B. Ma, J. Qi, Y. Wu, P. Wang, D. Li, S. Liu, Parameter estimation of the COVID-19 transmission model using an improved quantum-behaved particle swarm optimization algorithm, Digit. Signal Process., 127 (2022), 103577. http://dx.doi.org/10.1016/j.dsp.2022.103577 doi: 10.1016/j.dsp.2022.103577
|
| [56] |
X. Li, M. Yin, Parameter estimation for chaotic systems by hybrid differential evolution algorithm and artificial bee colony algorithm, Nonlinear Dyn., 77 (2014), 61–71. http://dx.doi.org/10.1007/s11071-014-1273-9 doi: 10.1007/s11071-014-1273-9
|
| [57] |
R. Tanabe, A. S. Fukunaga, Improving the search performance of SHADE using linear population size reduction, 2014 IEEE Congress on Evolutionary Computation (CEC), (2014), 1658-1665. http://dx.doi.org/10.1109/CEC.2014.6900380 doi: 10.1109/CEC.2014.6900380
|
| [58] |
K. M. Sallam, S. M. Elsayed, R. A. Sarker, D. L. Essam, Landscape-based adaptive operator selection mechanism for differential evolution, Inf. Sci., 418-419 (2017), 383–404. http://dx.doi.org/10.1016/j.ins.2017.08.028 doi: 10.1016/j.ins.2017.08.028
|
| [59] |
J. Wei, H. Niu, A ranking-based adaptive cuckoo search algorithm for unconstrained optimization, Expert Syst. Appl., 204 (2022), 117428. http://dx.doi.org/10.1016/j.eswa.2022.117428 doi: 10.1016/j.eswa.2022.117428
|
| [60] | N. H. Awad, M. Z. Ali, P. N. Suganthan, Ensemble sinusoidal differential covariance matrix adaptation with Euclidean neighborhood for solving CEC2017 benchmark problems, 2017 IEEE Congress on Evolutionary Computation (CEC), (2017), 372–379. http://dx.doi.org/10.1109/CEC.2017.7969336 |
| [61] | A. Kumar, R. K. Misra, D. Singh, Improving the local search capability of Effective Butterfly Optimizer using Covariance Matrix Adapted Retreat Phase, 2017 IEEE Congress on Evolutionary Computation (CEC), (2017), 1835–1842. http://dx.doi.org/10.1109/CEC.2017.7969524 |
| [62] | A. W. Mohamed, A. A. Hadi, A. M. Fattouh, K. M. Jambi, LSHADE with semi-parameter adaptation hybrid with CMA-ES for solving CEC 2017 benchmark problems, 2017 IEEE Congress on Evolutionary Computation (CEC), (2017), 145–152. http://dx.doi.org/10.1109/CEC.2017.7969307 |
| [63] |
N. Covic, B. Lacevic, Wingsuit Flying Search–A Novel Global Optimization Algorithm, IEEE Access, 8 (2020), 53883–53900. http://dx.doi.org/10.1109/ACCESS.2020.2981196 doi: 10.1109/ACCESS.2020.2981196
|
| [64] | Artificial Bee Colony Optimization, SKS Labs, 2022. Available from: https://www.mathworks.com/matlabcentral/fileexchange/74122-artificial-bee-colony-optimization |
| [65] |
I. Ahmadianfar, O. Bozorg-Haddad, X. Chu, Gradient-based optimizer: A new metaheuristic optimization algorithm, Inf. Sci., 540 (2020), 131–159. http://dx.doi.org/10.1016/j.ins.2020.06.037 doi: 10.1016/j.ins.2020.06.037
|
| [66] |
X. Li, J. Zhang, M. Yin, Animal migration optimization: An optimization algorithm inspired by animal migration behavior, Neural Comput. Applic., 24 (2014), 1867–1877. http://dx.doi.org/10.1007/s00521-013-1433-8 doi: 10.1007/s00521-013-1433-8
|
| [67] |
X. Ma, D. Vervoort, Critical care capacity during the COVID-19 pandemic: global availability of intensive care beds, J. Crit. Care., 58 (2020), 96–97. http://dx.doi.org/10.1016/j.jcrc.2020.04.012 doi: 10.1016/j.jcrc.2020.04.012
|
| [68] |
F. Campbell, B. Archer, H. Laurenson-Schafer, Y. Jinnai, F. Konings, N. Batra, et al., Increased transmissibility and global spread of SARS-CoV-2 variants of concern as at June 2021, Euro Surveill., 26 (2021), 2100509. http://dx.doi.org/10.2807/1560-7917.ES.2021.26.24.2100509 doi: 10.2807/1560-7917.ES.2021.26.24.2100509
|
| [69] | R. C. Barnard, N. G. Davies, C. A. Pearson, M. Jit, W. J. Edmunds, Projected epidemiological consequences of the Omicron SARS-CoV-2 variant in England, December 2021 to April 2022, preprint available at medRxiv, (16 December 2021). http://dx.doi.org/10.1101/2021.12.15.21267858 |
| [70] | Report 50-Hospitalisation risk for Omicron cases in England, Imperial College London (22-12-2021), N. Ferguson, A. Ghani, W. Hinsley, E. Volz, on behalf of the Imperial College COVID-19 response team, 2021. Available from: http://hdl.handle.net/10044/1/93035 |
| [71] |
V. Gupta, R. C. Bhoyar, A. Jain, S. Srivastava, R. Upadhayay, M. Imran et al., Asymptomatic Reinfection in 2 Healthcare Workers From India With Genetically Distinct Severe Acute Respiratory Syndrome Coronavirus 2, Clin. Infect. Dis., 73 (2021), e2823–e2825. http://dx.doi.org/10.1093/cid/ciaa1451 doi: 10.1093/cid/ciaa1451
|
| [72] |
P. Colson, M. Finaud, N. Levy, J. C. Lagier, D. Raoult, Evidence of SARS-CoV-2 re-infection with a different genotype, J. Infect., 82 (2021), 84–123. http://dx.doi.org/10.1016/j.jinf.2020.11.011 doi: 10.1016/j.jinf.2020.11.011
|
| [73] |
P. Brouqui, P. Colson, C. Melenotte, L. Houhamdi, M. Bedotto, C. Devaux, et al., COVID-19 re-infection, Eur. J. Clin. Invest., 51 (2021), e13537. http://dx.doi.org/10.1111/eci.13537 doi: 10.1111/eci.13537
|
| [74] |
P. C. Resende, J. F. Bezerra, R. Vasconcelos, I. Arantes, L. Appolinario, A. C. Mendonça, et al., Severe acute respiratory syndrome coronavirus 2 P. 2 lineage associated with reinfection case, Brazil, June–October 2020, Emerg. Infect. Dis., 27 (2021), 1789. http://dx.doi.org/10.3201/eid2707.210401 doi: 10.3201/eid2707.210401
|
| [75] |
J. P. Townsend, H. B. Hassler, Z. Wang, S. Miura, J. Singh, S. Kumar, et al., The durability of immunity against reinfection by SARS-CoV-2: A comparative evolutionary study, Lancet Microbe, 2 (2021), e666–e675. http://dx.doi.org/10.1016/S2666-5247(21)00219-6 doi: 10.1016/S2666-5247(21)00219-6
|
| [76] | B. J. Gardner, A. M. Kilpatrick, Estimates of reduced vaccine effectiveness against hospitalization, infection, transmission and symptomatic disease of a new SARS-CoV-2 variant, Omicron (B.1.1.529), using neutralizing antibody titers, preprint available at medRxiv, (12 December 2021). http://dx.doi.org/10.1101/2021.12.10.21267594 |
| [77] |
S. Mirjalili, The Ant Lion Optimizer, Adv. Eng. Softw., 83 (2015), 80–98. http://dx.doi.org/10.1016/j.advengsoft.2015.01.010 doi: 10.1016/j.advengsoft.2015.01.010
|
| [78] | R. Victor, Z. Nahorski, R. V. V. Vidal, Simulated Annealing Applied to Combinatorial Optimization, Special Issue of the Journal of Control and Cybernetics, Warszawa, 25 (1996). |
| [79] |
J. Kennedy, R. Eberhart, Particle swarm optimization, Proceedings of ICNN'95-International Conference on Neural Networks, 4 (1995), 1942–1948. http://dx.doi.org/10.1109/ICNN.1995.488968 doi: 10.1109/ICNN.1995.488968
|
| [80] |
S. Mirjalili, S. M. Mirjalili, A. Lewis, Grey Wolf Optimizer, Adv. Eng. Softw., 69 (2014), 46–61. http://dx.doi.org/10.1016/j.advengsoft.2013.12.007 doi: 10.1016/j.advengsoft.2013.12.007
|
| [81] | G. G. Wang, S. Deb, L. d. S. Coelho, Elephant Herding Optimization, 2015 3rd International Symposium on Computational and Business Intelligence (ISCBI), (2015), 1–5. http://dx.doi.org/10.1109/ISCBI.2015.8 |
| [82] | D. E. Goldberg, Genetic Algorithms in Search, Optimization, and Machine Learning, Addison-Wesley Longman Publishing Co., Inc., USA, 1989. |
| [83] |
Y. Villuendas-Rey, J. L. Velázquez-Rodríguez, M. D. Alanis-Tamez, M. A. Moreno-Ibarra, C. Yáñez-Márquez, Mexican Axolotl Optimization: A Novel Bioinspired Heuristic, Mathematics, 9 (2021), 781. http://dx.doi.org/10.3390/math9070781 doi: 10.3390/math9070781
|
| [84] |
A. A. Heidari, S. Mirjalili, H. Faris, I. Aljarah, M. Mafarja, H. Chen, Harris hawks optimization: Algorithm and applications, Future Gener. Comput. Syst., 97 (2019), 849–872. http://dx.doi.org/10.1016/j.future.2019.02.028 doi: 10.1016/j.future.2019.02.028
|
| [85] |
C. Audet, J. E. Dennis, Analysis of Generalized Pattern Searches, SIAM J. Optim., 13 (2002), 889–903. http://dx.doi.org/10.1137/S1052623400378742 doi: 10.1137/S1052623400378742
|
| [86] |
S. Mirjalili, A. Lewis, The Whale Optimization Algorithm, Adv. Eng. Softw., 95 (2016), 51–67. http://dx.doi.org/10.1016/j.advengsoft.2016.01.008 doi: 10.1016/j.advengsoft.2016.01.008
|
| [87] |
M. Khishe, M. R. Mosavi, Chimp optimization algorithm, Expert Syst. Appl., 149 (2020), 113338. http://dx.doi.org/10.1016/j.eswa.2020.113338 doi: 10.1016/j.eswa.2020.113338
|
| [88] | X. S. Yang, A New Metaheuristic Bat-Inspired Algorithm, In: J. R. González, D. A. Pelta, C. Cruz, G. Terrazas, N. Krasnogor, Eds, Nature Inspired Cooperative Strategies for Optimization (NICSO 2010), Studies in Computational Intelligence, vol 284. Springer, Berlin, Heidelberg, 2010. http://dx.doi.org/10.1007/978-3-642-12538-6_6 |










Figures(11) / Tables(5)

Victoria May P. Mendoza, Renier Mendoza, Jongmin Lee, Eunok Jung. Adjusting non-pharmaceutical interventions based on hospital bed capacity using a multi-operator differential evolution[J]. AIMS Mathematics, 2022, 7(11): 19922-19953. doi: 10.3934/math.20221091







 DownLoad:
DownLoad: