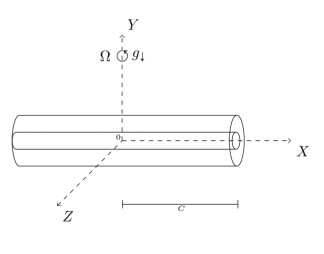
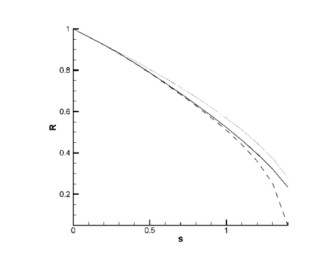
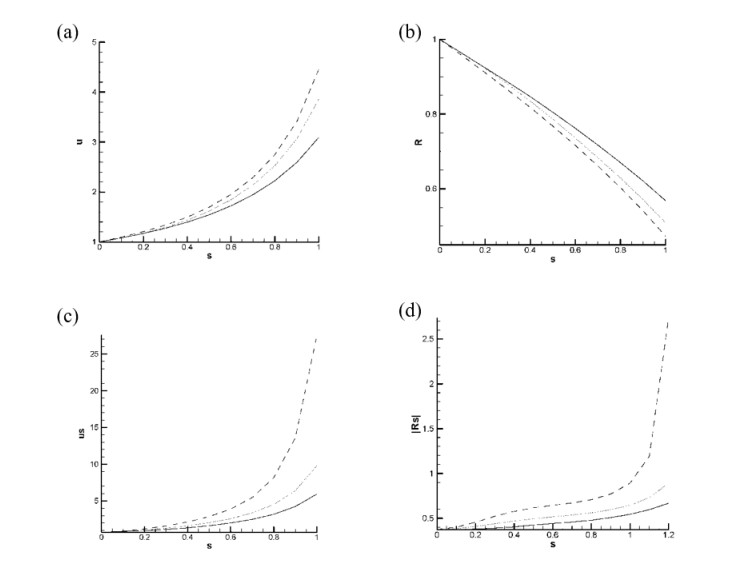
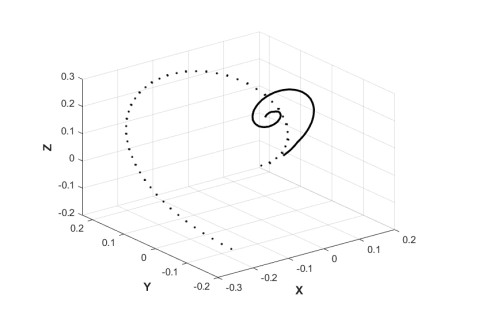
We consider rotationally driven nonlinear polymeric fiber jet, whose centerline is in an inclined plane, in the presence of gravity force. An empirical viscosity model is used for the polymeric fluid flow to investigate properties of the rotating inclined polymeric fiber jet. The aim of the study is to understand properties of such inclined fiber jet shape, which can be due to orientation change of an orifice in a rotating spinneret that generates such jet. Perturbation, asymptotic, scaling and numerical techniques are used to determine the nonlinear steady solutions for the jet quantities for different values of the parameters due to gravity, rotation, viscosity, surface tension and relaxation time. In contrast to the horizontal jet case, presence of gravity and jet inclination increase values of the jet speed, strain rate, stretching rate and the centerline curvature and decrease the value of the jet radius and more so with increasing the arc length, gravity, rotation rate and the relaxation time. However, a non-inclined jet with no imposed restriction on its shape and in presence of gravity leads to smaller fiber radius and larger speed as compared to the ones for inclined jet case.
Citation: Daniel N. Riahi, Saulo Orizaga. On rotationally driven nonlinear inclined polymeric jet with gravity effect[J]. Mathematics in Engineering, 2022, 4(2): 1-18. doi: 10.3934/mine.2022014
We consider rotationally driven nonlinear polymeric fiber jet, whose centerline is in an inclined plane, in the presence of gravity force. An empirical viscosity model is used for the polymeric fluid flow to investigate properties of the rotating inclined polymeric fiber jet. The aim of the study is to understand properties of such inclined fiber jet shape, which can be due to orientation change of an orifice in a rotating spinneret that generates such jet. Perturbation, asymptotic, scaling and numerical techniques are used to determine the nonlinear steady solutions for the jet quantities for different values of the parameters due to gravity, rotation, viscosity, surface tension and relaxation time. In contrast to the horizontal jet case, presence of gravity and jet inclination increase values of the jet speed, strain rate, stretching rate and the centerline curvature and decrease the value of the jet radius and more so with increasing the arc length, gravity, rotation rate and the relaxation time. However, a non-inclined jet with no imposed restriction on its shape and in presence of gravity leads to smaller fiber radius and larger speed as compared to the ones for inclined jet case.

| [1] |
S. P. Decent, A. C. King, I. M. Wallwork, Free jets spun from a prilling tower, J. Eng. Math., 42 (2002), 265-282. doi: 10.1023/A:1016127207992

|
| [2] |
I. M. Wallwork, S. P. Decent, A. C. King, R. M. S. M. Schulkes, The trajectory and stability of a spiraling liquid jet: Part I. Inviscid theory, J. Fluid Mech., 459 (2002), 43-65. doi: 10.1017/S0022112002008108
|
| [3] |
E. I. Parau, S. P. Decent, M. J. H. Simmons, D. C. Y. Wong, A. C. King, Nonlinear viscous liquid jets from a rotating orifice, J. Eng. Math., 57 (2007), 159-179. doi: 10.1007/s10665-006-9118-2
|
| [4] |
S. Panda, N. Marheineke, R. Wegener, Systematic derivation of an asymptotic model for the dynamics of curved viscous fibers, Math. Method. Appl. Sci., 31 (2008), 1153-1173. doi: 10.1002/mma.962
|
| [5] | S. P. Decent, A. C. King, M. J. H. Simmons, E. I. Parau, I. M. Wallwork, C. J. Gurney, et al., The trajectory and stability of spiraling liquid jet: Viscous theory, Appl. Math. Model., 33 (2009), 4283-4302. |
| [6] |
N. Marheineke, R. Wegener, Asymptotic model for the dynamics of curved viscous fibres with surface tension, J. Fluid Mech., 622 (2009), 345-369. doi: 10.1017/S0022112008005259
|
| [7] | K. Sarkar, C. Gomez, S. Zambrano, M. Ramirez, E. de Hoyos, H. Vasquez, et al., Electrospinning to forcespinning, Mater. Today, 13 (2010), 42-44. |
| [8] | S. Padron, I. D. Caruntu, K. Lozano, On 2d forcespinning modeling, In: Proceedings of the 2011 ASME International Mechanical Engineering Congress and Exposition, IMECE2011-64823, USA: ASME Publications, 2011,821-830. |
| [9] |
S. Padron, R. Patlan, J. Gutierrez, N. Santos, T. Eubanks, K. Lozano, Production and characterization of hybrid BEH-PPV/PEO conjugated polymer nanofibers by forcespinning, J. Appl. Polym. Sci., 125 (2012), 3610-3616. doi: 10.1002/app.36420
|
| [10] |
B. Vasquez, H. Vasquez, K. Lozano, Preparation and characterization of polyvinylidene fluoride nanofibrous membranes by forcespinning, Polym. Eng. Sci., 52 (2012), 2260-2265. doi: 10.1002/pen.23169
|
| [11] |
A. Altecor, Y. Mao, K. Lozano, Large-scale synthesis of tin-doped indium oxide nanofibers using water as solvent, Funct. Mater. Lett., 5 (2012), 1250020. doi: 10.1142/S1793604712500208
|
| [12] |
S. Padron, A. Fuentes, K. Lozano, Experimental study of nanofiber production through forcespinning, J. Appl. Phys., 113 (2013), 024318. doi: 10.1063/1.4769886
|
| [13] |
S. M. Taghavi, R. M. Larson, Regularized thin-fiber model for nanofiber formation by centrifugal spinning, Phys. Rev. E, 89 (2014), 023011. doi: 10.1103/PhysRevE.89.023011
|
| [14] | S. M. Taghavi, R. G. Larson, Erratum: Regularized thin-fiber model for nanofiber formation by centrifugal spinning, Phys. Rev. E, 89 (2014), 059903(E). |
| [15] |
X. Zhang, Y. Lu, Centrifugal spinning: An alternative approach to fabricate nanofibers at high speed and low cost, Polym. Rev., 54 (2014), 677-701. doi: 10.1080/15583724.2014.935858
|
| [16] |
S. Mahalingam, G. G. Ren, M. J. Edirisinghe, Rheology and pressurized gyration of starch and starch-loaded poly (ethylene oxide), Carbohydr. Polym., 114 (2014), 279-287. doi: 10.1016/j.carbpol.2014.08.007
|
| [17] |
M. A. Hammami, M. Karifa, O. Harzallah, Centrifugal force spinning of PA6 nanofibers-processability and morphology of solution-spun fibers, J. Text Inst., 105 (2014), 637-647. doi: 10.1080/00405000.2013.842680
|
| [18] | A. M. Alsharif, J. Uddin, Instability of viscoelastic curved liquid jets with surfactants, J. Non-Newtonian Fluid Mech., 2015 (2015), 1-12. |
| [19] |
S. Mahalingam, B. T. Raimi-Abraham, D. Q. M. Craig, M. J. Edirisinghe, Formation of protein and protein-gold nanoparticle stabilized microbubbles by pressurized gyration, Langmuir, 31 (2015), 659-666. doi: 10.1021/la502181g
|
| [20] | X. Hong, M. Edirisinghe, S. Mahalingam, Beads, beaded-fibers and fibers: Tailoring the morphology of poly (caprolactone) using pressurized gyration, Mater. Sci. Eng., 69 (2016), 1373-1382. |
| [21] |
X. Wu, S. Mahalingam, S. K. VanOosten, C. Wisdom, C. Tamerler, M. Edirisinghe, New generation of tunable bioactive shape memory mats integrated with generally engineered protein, Macromol. Biosci., 17 (2017), 1600270. doi: 10.1002/mabi.201600270
|
| [22] | X. Hong, S. Mahalingam, M. Edirisinghe, Sinultaneous application of pressure-infusion-gyration to generate polymeric nanofibers, Mater. Eng., 302 (2017), 1600564. |
| [23] | P. L. Heseltine, J. Ahmed, M. Edirisinghe, Development in pressurized gyration for the mass production of polymeric fibers, Macromol. Mater. Eng., 303 (2018), 1800218. |
| [24] | X. Hong, A. Harker, M.Edirisinghe, Process modeling for the fiber diameter of polymer, spun by pressure-coupled infusion gyration, ACS Omega, 3 (2018), 5470-5479. |
| [25] |
D. N. Riahi, Modeling and computation of nonlinear rotating polymeric fiber jets during forcespinning, Int. J. Nonlin. Mech., 92 (2017), 1-7. doi: 10.1016/j.ijnonlinmec.2017.03.004
|
| [26] |
D. N. Riahi, K. Lozano, L. Cremar, A. Fuentes, On nonlinear rotating polymeric jets during forcespinning process, Fluid Dyn. Res., 50 (2018), 065507. doi: 10.1088/1873-7005/aadfd0
|
| [27] | F. M. White, Viscous fluid flow, 2 Eds., New York: McGraw-Hill Inc., 1991. |
| [28] | R. P. Chahhahra, J. F. Richardson, Non-Newtonian flow and applied rheology, 2 Eds., Oxford: Butterworth-Heinemann, 2008. |
| [29] |
W. N. Song, Z. M. Xia, A phenomenological viscosity model for polymeric fluid, J. Non-Newtonian Fluid Mech., 53 (1994), 151-163. doi: 10.1016/0377-0257(94)85046-1
|
| [30] |
J. J. Feng, The stretching of an electrified non-Newtonian jet: A model for electrospinning, Phys. Fluids, 14 (2002), 3912-3926. doi: 10.1063/1.1510664
|
| [31] |
J. J. Feng, Stretching of a straight electrically charged viscoelastic jet, J. Non-Newtonian Fluid Mech., 116 (2003), 55-70. doi: 10.1016/S0377-0257(03)00173-3
|
| [32] | U. M. Ascher, R. M. M. Mathheij, R. D. Russell, Numerical solution of boundary value problems for ordinary differential equations, Philadelphia, PA, USA: SIAM Publication, 1995. |
| [33] |
C. P. Carroll, Y. L. Joo, Electrospinning of viscoelastic Boger fluids: modeling and experiments, Phys. Fluids, 18 (2006), 053102. doi: 10.1063/1.2200152
|
Figures(7)

Daniel N. Riahi, Saulo Orizaga. On rotationally driven nonlinear inclined polymeric jet with gravity effect[J]. Mathematics in Engineering, 2022, 4(2): 1-18. doi: 10.3934/mine.2022014







 DownLoad:
DownLoad: