This paper presents and examines a newly improved linear technique for solving the equilibrium problem of a pseudomonotone operator and the fixed point problem of a nonexpansive mapping within a real Hilbert space framework. The technique relies two modified mildly inertial methods and the subgradient extragradient approach. In addition, it can be viewed as an advancement over the previously known inertial subgradient extragradient approach. Based on common assumptions, the algorithm's weak convergence has been established. Finally, in order to confirm the efficiency and benefit of the proposed algorithm, we present a few numerical experiments.
Citation: Francis Akutsah, Akindele Adebayo Mebawondu, Austine Efut Ofem, Reny George, Hossam A. Nabwey, Ojen Kumar Narain. Modified mildly inertial subgradient extragradient method for solving pseudomonotone equilibrium problems and nonexpansive fixed point problems[J]. AIMS Mathematics, 2024, 9(7): 17276-17290. doi: 10.3934/math.2024839
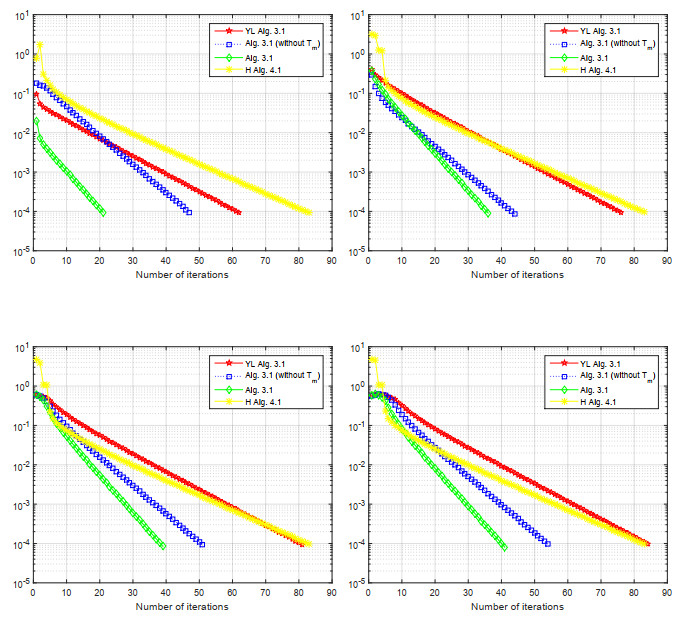
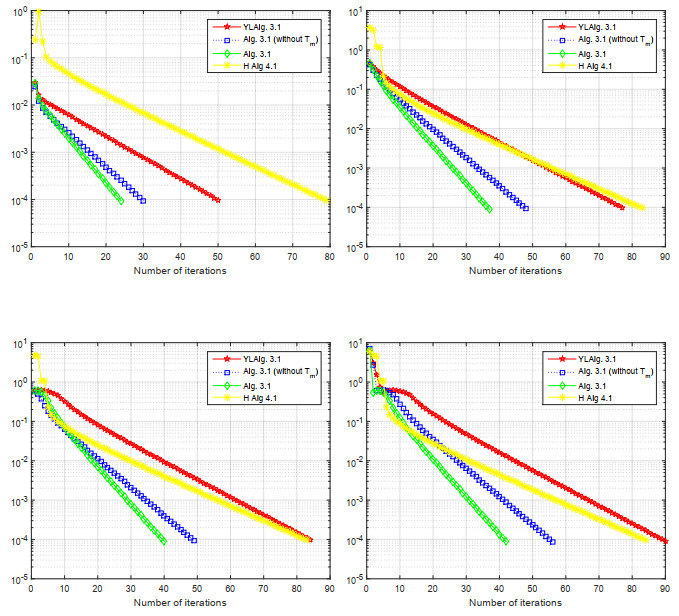
This paper presents and examines a newly improved linear technique for solving the equilibrium problem of a pseudomonotone operator and the fixed point problem of a nonexpansive mapping within a real Hilbert space framework. The technique relies two modified mildly inertial methods and the subgradient extragradient approach. In addition, it can be viewed as an advancement over the previously known inertial subgradient extragradient approach. Based on common assumptions, the algorithm's weak convergence has been established. Finally, in order to confirm the efficiency and benefit of the proposed algorithm, we present a few numerical experiments.

| [1] | P. Anh, A hybrid extragradient method for pseudomonotone equilibrium problems and fixed point problems, Bull. Malays. Math. Sci. Soc., 36 (2013), 107–116. |
| [2] | A. Antipin, On a method for convex programs using a symmetrical modification of the Lagrange function, Ekon. Mat. Metody, 12 (1976), 1164–1173. |
| [3] |
F. Akutsah, A. Mebawondu, H. Abass, O. Narain, A self adaptive method for solving a class of bilevel variational inequalities with split variational inequlaity and composed fixed point problem constraints in Hilbert spaces, Numer. Algebra Control, 13 (2023), 117–138. http://dx.doi.org/10.3934/naco.2021046 doi: 10.3934/naco.2021046

|
| [4] |
F. Akutsah, A. Mebawondu, G. Ugwunnadi, O. Narain, Inertial extrapolation method with regularization for solving monotone bilevel variation inequalities and fixed point problems in real Hilbert space, J. Nonlinear Funct. Anal., 2022 (2022), 5. http://dx.doi.org/10.23952/jnfa.2022.5 doi: 10.23952/jnfa.2022.5
|
| [5] |
F. Akutsah, A. Mebawondu, G. Ugwunnadi, P. Pillay, O. Narain, Inertial extrapolation method with regularization for solving a new class of bilevel problem in real Hilbert spaces, SeMA, 80 (2023), 503–524. http://dx.doi.org/10.1007/s40324-022-00293-2 doi: 10.1007/s40324-022-00293-2
|
| [6] |
F. Alvares, H. Attouch, An inertial proximal method for maximal monotone operators via discretization of a nonlinear oscillator with damping, Set Valued Anal., 9 (2001), 3–11. http://dx.doi.org/10.1023/A:1011253113155 doi: 10.1023/A:1011253113155
|
| [7] |
P. Anh, Strong convergence theorems for nonexpansive mappings Ky Fan inequalities, J. Optim. Theory Appl., 154 (2012), 303–320. http://dx.doi.org/10.1007/s10957-012-0005-x doi: 10.1007/s10957-012-0005-x
|
| [8] | E. Blum, W. Oettli, From optimization and variational inequalities to equilibrium problems, Mathematics Student, 63 (1994), 123–145. |
| [9] |
Y. Censor, A. Gibali, S. Reich, The subgradient extragradient method for solving variational inequalities in Hilbert spaces, J. Optim. Theory Appl., 148 (2011), 318–335. http://dx.doi.org/10.1007/s10957-010-9757-3 doi: 10.1007/s10957-010-9757-3
|
| [10] |
Y. Censor, A. Gibali, S. Reich, Extensions of Korpelevich's extragradient method for variational inequality problems in Euclidean space, Optimization, 61 (2012), 119–1132. http://dx.doi.org/10.1080/02331934.2010.539689 doi: 10.1080/02331934.2010.539689
|
| [11] |
L. Ceng, X. Qin, Y. Shehu, J. Yao, Mildly inertial subgradient extragradient method for variational inequalities involving an asymptotically nonexpansive and finitely many nonexpansive mappings, Mathematics, 7 (2019), 881. http://dx.doi.org/10.3390/math7100881 doi: 10.3390/math7100881
|
| [12] | P. Daniele, F. Giannessi, A. Maugeri, Equilibrium problems and variational model, New York: Springer, 2003. http://dx.doi.org/10.1007/978-1-4613-0239-1 |
| [13] |
A. Hanjing, S. Suantai, A fast image restoration algorithm based on a fixed point and optimization method, Mathematics, 8 (2020), 378. http://dx.doi.org/10.3390/math8030378 doi: 10.3390/math8030378
|
| [14] |
Z. He, The split equilibrium problem and its convergence algorithms, J. Inequal. Appl., 2012 (2012), 162. http://dx.doi.org/10.1186/1029-242X-2012-162 doi: 10.1186/1029-242X-2012-162
|
| [15] |
D. Hieu, Halpern subgradient extragradient method extended to equilibrium problems, RACSAM, 111 (2017), 823–840. http://dx.doi.org/10.1007/s13398-016-0328-9 doi: 10.1007/s13398-016-0328-9
|
| [16] |
D. Hieu, Hybrid projection methods for equilibrium problems with non-Lipschitz type bifunctions, Math. Method. Appl. Sci., 40 (2017), 4065–4079. http://dx.doi.org/10.1002/mma.4286 doi: 10.1002/mma.4286
|
| [17] |
L. Jolaoso, M. Aphane, A self-adaptive inertial subgradient extragradient method for pseudomonotone equilibrium and common fixed point problems, Fixed Point Theory Appl., 2020 (2020), 9. http://dx.doi.org/10.1186/s13663-020-00676-y doi: 10.1186/s13663-020-00676-y
|
| [18] | G. Korpelevich, The extragradient method for finding saddle points and other problems, Matekon, 12 (1976), 747–756. |
| [19] |
M. Lukumon, A. Mebawondu, A. Ofem, C. Agbonkhese, F. Akutsah, O. Narain, An efficient iterative method for solving quasimonotone bilevel split variational inequality problem, Adv. Fixed Point Theory, 13 (2023), 26. http://dx.doi.org/10.28919/afpt/8269 doi: 10.28919/afpt/8269
|
| [20] | A. Mebawondu, A. Ofem, F. Akutsah, C. Agbonkhese, F. Kasali, O. Narain, A new double inertial subgradient extragradient algorithm for solving split pseudomonotone equilibrium problems and fixed point problems, Ann. Univ. Ferrara, in press. http://dx.doi.org/10.1007/s11565-024-00496-7 |
| [21] | A. Moudafi, E. Al-Shemas, Simultaneous iterative methods for split equality problem, Trans. Math. Program. Appl., 1 (2013), 1–11. |
| [22] |
L. Muu, W. Oettli, Convergence of an adaptive penalty scheme for finding constrained equilibria, Nonlinear Anal., 18 (1992), 1159–1166. http://dx.doi.org/10.1016/0362-546X(92)90159-C doi: 10.1016/0362-546X(92)90159-C
|
| [23] |
A. Ofem, A. Mebawondu, G. Ugwunnadi, H. Isik, O. Narain, A modified subgradient extragradient algorithm-type for solving quasimonotone variational inequality problems with applications, J. Inequal. Appl., 2023 (2023), 73. http://dx.doi.org/10.1186/s13660-023-02981-7 doi: 10.1186/s13660-023-02981-7
|
| [24] | A. Ofem, A. Mebawondu, G. Ugwunnadi, P. Cholamjiak, O. Narain, Relaxed Tseng splitting method with double inertial steps for solving monotone inclusions and fixed point problems, Numer. Algor., in press. http://dx.doi.org/10.1007/s11075-023-01674-y |
| [25] |
A. Ofem, A. Mebawondu, C. Agbonkhese, G. Ugwunnadi, O. Narain, Alternated inertial relaxed tseng method for solving fixed point and quasi-monotone variational inequality problems, Nonlinear Functional Analysis and Applications, 29 (2024), 131–164. http://dx.doi.org/10.22771/nfaa.2024.29.01.10 doi: 10.22771/nfaa.2024.29.01.10
|
| [26] |
A. Ofem, J. Abuchu, G. Ugwunnadi, H. Nabwey, A. Adamu, O. Narain, Double inertial steps extragadient-type methods for solving optimal control and image restoration problems, AIMS Mathematics, 9 (2024), 12870–12905. http://dx.doi.org/10.3934/math.2024629 doi: 10.3934/math.2024629
|
| [27] |
B. Polyak, Some methods of speeding up the convergence of iteration methods, USSR Comp. Math. Math. Phys., 4 (1964), 1–17. http://dx.doi.org/10.1016/0041-5553(64)90137-5 doi: 10.1016/0041-5553(64)90137-5
|
| [28] |
D. Quoc Tran, M. Le Dung, V. Nguyen, Extragradient algorithms extended to equilibrium problems, Optimization, 57 (2008), 749–776. http://dx.doi.org/10.1080/02331930601122876 doi: 10.1080/02331930601122876
|
| [29] |
H. Rehman, P. Kumam, P. Cho, Y. Suleiman, W. Kumam, Modified Popov's explicit iterative algorithms for solving pseudomonotone equilibrium problems, Optim. Method. Softw., 36 (2021), 82–113. http://dx.doi.org/10.1080/10556788.2020.1734805 doi: 10.1080/10556788.2020.1734805
|
| [30] |
K. Tan, H. Xu, Approximating fixed points of nonexpansive mappings by the ishikawa iteration process, J. Math. Anal. Appl., 178 (1993), 301–308. http://dx.doi.org/10.1006/jmaa.1993.1309 doi: 10.1006/jmaa.1993.1309
|
| [31] |
D. Thong, D. Hieu, Inertial subgradient extragradient algorithms with line-search process for solving variational inequality problems and fixed point problems, Numer. Algor., 80 (2019), 1283–1307. http://dx.doi.org/10.1007/s11075-018-0527-x doi: 10.1007/s11075-018-0527-x
|
| [32] | A. Tada, W. Takahashi, Strong convergence theorem for an equilibrium problem and a nonexpansive mapping, In: Nonlinear analysis and convex analysis, Yokohama: Yokohama Publishers, 2006,609–617. |
| [33] |
J. Yang, H. Liu, The subgradient extragradient method extended to pseudomonotone equilibrium problems and fixed point problems in Hilbert space, Optim. Lett., 14 (2020), 1803–1816. http://dx.doi.org/10.1007/s11590-019-01474-1 doi: 10.1007/s11590-019-01474-1
|
Figures(2) / Tables(2)

Francis Akutsah, Akindele Adebayo Mebawondu, Austine Efut Ofem, Reny George, Hossam A. Nabwey, Ojen Kumar Narain. Modified mildly inertial subgradient extragradient method for solving pseudomonotone equilibrium problems and nonexpansive fixed point problems[J]. AIMS Mathematics, 2024, 9(7): 17276-17290. doi: 10.3934/math.2024839







 DownLoad:
DownLoad: